 步进电机选型的计算方法11.docx
步进电机选型的计算方法11.docx
- 文档编号:15491703
- 上传时间:2023-07-05
- 格式:DOCX
- 页数:9
- 大小:82.54KB
步进电机选型的计算方法11.docx
《步进电机选型的计算方法11.docx》由会员分享,可在线阅读,更多相关《步进电机选型的计算方法11.docx(9页珍藏版)》请在冰点文库上搜索。
步进电机选型的计算方法11
步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
◎ 驱动模式的选择
驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
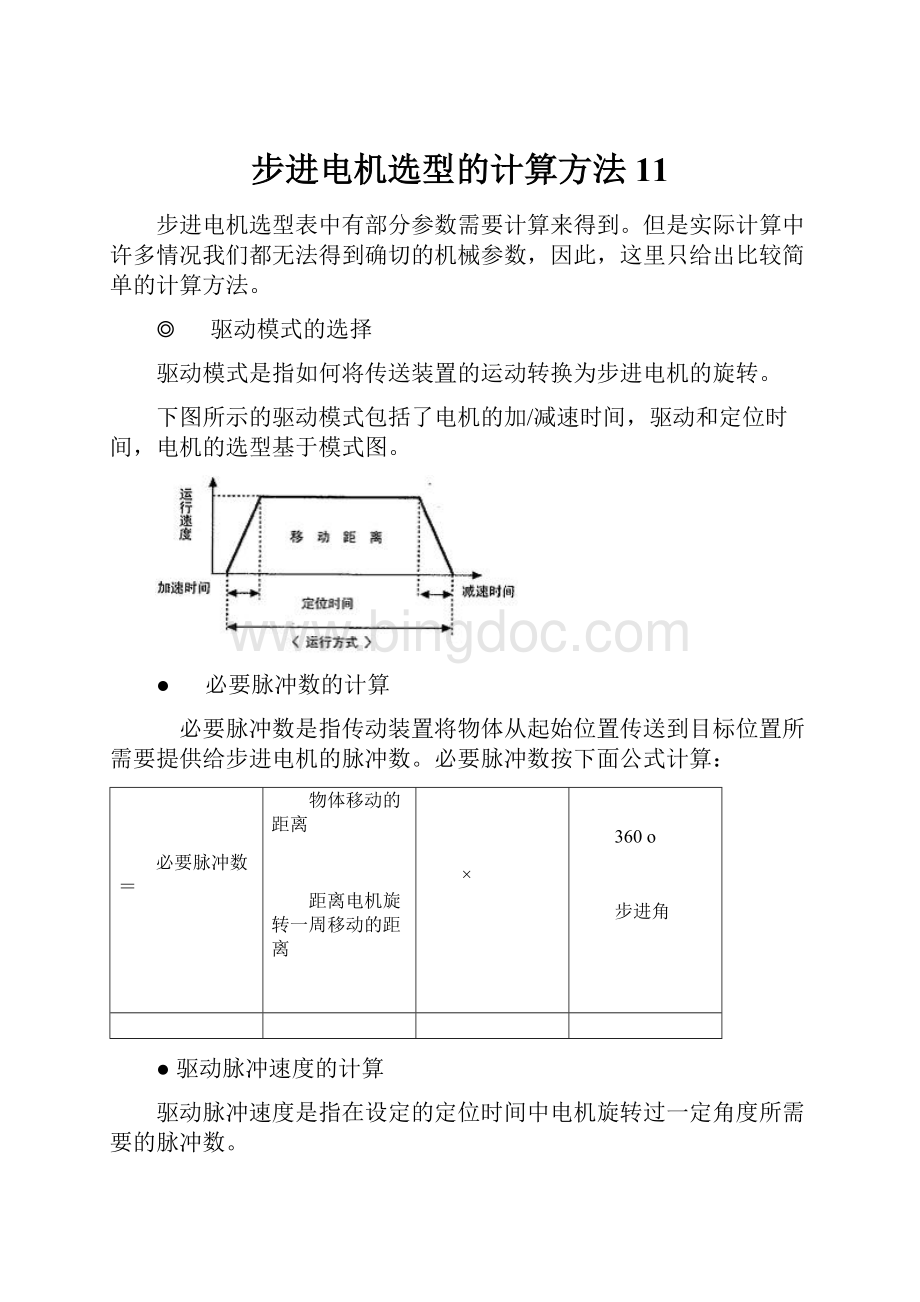
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
● 必要脉冲数的计算
必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:
必要脉冲数=
物体移动的距离
距离电机旋转一周移动的距离
×
360o
步进角
●驱动脉冲速度的计算
驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式
自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:
驱动脉冲速度[Hz]=
必要脉冲数[脉冲]
定位时间[秒]
(2)加/减速运行方式
加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:
驱动脉冲速度[Hz]=
必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]
定位时间[秒]-加/减速时间[秒]
◎电机力矩的简单计算示例
必要的电机力矩=(负载力矩+加/减速力矩)×安全系数
●负载力矩的计算(TL)
负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
步进电机驱动过程中始终需要此力矩。
负载力矩根据传动装置和物体的重量的不同而不同。
许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。
负载力矩可以根据下面的图表和公式来计算。
(1)滚轴丝杆驱动
※负载力矩的计算公式:
TL=[
F·PB
2πη
+
μ0F0PB
2π
]×
1
i
[kgf·cm]
※负载力矩的估算公式:
TL=
m·PB
2πη
×
1
i
[kgf·cm](水平方向)
TL=
m·PB
2πη
×
1
i
×2[kgf·cm](垂直方向)
(2)传送带/齿条齿轮传动
※负载力矩的计算公式:
TL=
F
2πη
×
πD
i
=
FD
2ηi
[kgf·cm]
F=FA+m(sinα+μcosα)[Kg]
※负载力矩的估算公式:
TL=
D
2
×m×
1
η
×
1
i
[kgf·cm](水平方向)
TL=
D
2
×m×
1
η
×
1
i
×2[kgf·cm](垂直方向)
(3)皮带轮传动
※负载力矩的计算公式:
TL=
μFA+m
2π
×
πD
i
=
(μFA+m)D
2i
[kgf·cm]
※负载力矩的估算公式:
TL=
D
2
×mg×
1
i
[kgf·cm]
(4)实测方法
我们也可以通过这种方法得到负载力矩:
用弹簧秤拉动滑轮慢慢转动,此时弹簧秤会有一个读数,这个数值就是所用力的大小(FB),然后乘以滑轮的半径就可以得到负载力矩(如下式)。
通常这种方法得到数值要比计算得到得结果要精确。
TL=
FBD
2
[kgf·cm]
[参数说明]
F:
轴方向负载[Kg]
F0:
预负载[Kg](≌1/3F)
η:
效率(0.85~0.95)
FA:
预负载[]
i:
减速比
μ:
滑动面摩擦系数
μ0:
预压螺帽内的摩擦系数(0.1~0.3)
PB:
滚轴丝杆螺距(cm/rev)
FB:
主轴开始运转时的力[Kg]
D:
滑轮直径
m:
工作物和工作台的总重量[Kg]
α:
倾斜角度
●加/减速力矩的计算(Ta)
加/减速力矩是用来加速或减速与电机相连的传动装置。
根据加/减速时间和传动装置负载惯性惯量的不同,这个力矩会有很大的变化。
因此,自启动运行方式和加/减速运行方式的力矩会有一个较大的不同。
加/减速力矩可以按下式计算:
※自启动运行方式(需要较大的加/减速力矩)
加/减速力矩[kgf·cm]
=
转子惯性惯量[kgm2]+负载惯性惯量[kgm2]
重力加速度[cm/sec2]
×
π×步进角[o]×驱动脉冲速度2[Hz]
180×3.6/步进角[o]
※加/减速运行方式
加/减速力矩[kgf·cm]
=
转子惯性惯量[kgm2]+负载惯性惯量[kgm2]
重力加速度[cm/sec2]
×
π×步进角[o]
180o
×
运行脉冲速度[Hz]-启动脉冲速度[Hz]
加/减速时间[sec]
步进电机选型的计算示例
一、必要脉冲数和驱动脉冲数速度计算的示例
下面给出的是一个
3
相步进电机必要脉冲数和驱动脉冲速度的计算示例。
这是一个实际应用例子,可
以更好的理解电机选型的计算方法。
1.1
驱动滚轴丝杆
如下图,
3
相步进电机(
1.2
°
/
步)驱动物体运动
1
秒钟,则必要脉冲数和驱动脉冲速度的计算方法如
下:
必要脉冲数=
100
10


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 步进 电机 选型 计算方法 11
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《保险学概论》期末复习指导书蓝本答案要点.docx
《保险学概论》期末复习指导书蓝本答案要点.docx
-
《读李白诗歌 品太白遗韵》.docx
-
《海底两万里》读书笔记800字.docx
-
《经济法基础》考试真题及答案921.docx
-
《石灰吟》教学设计部编版1.docx
-
《数字化测图》课程标准.docx
-
#网上购物系统需求分析.docx
-
《大棚蔬菜》教案doc.docx
-
《各具特色的民居》综合资料.docx
-
#加强中小型企业人力资源管理的对策思考.docx
-
《计算机文化基础wordl》课程单元教学设计.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《菜根谭》注译四闲适篇.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《操作系统》二学期A卷及答案.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《傅雷家书》名著阅读笔记.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
《时间旅行者的妻子》中英文剧本.docx
-
《化工原理》第六章蒸发.docx
-
《你若安好便是晴天林徽因传》序.docx
-
《蓝海战略》概要11页.docx
-
《体育科学》论文格式.docx
-
《劝学师说赤壁赋登泰山记》文言现象翻译简答题.docx
-
《微观经济学》期末试题.docx
-
《微机测控系统原理与设计》习题解答.docx
-
《扫雪心得体会》.docx
-
《质量处理学》学习规划.docx
-
《物质的密度》教案.docx
-
怎么写工程质量承诺书.docx
-
向心力第六节.docx
-
学年高一语文下学期单元综合检测5.docx
-
章串并联电路练习题及答案doc.docx
-
长螺旋钻孔灌注桩施工方案62638.docx
-
一年级下册语文复习资料人教版.docx
-
一年级语文下学期期末全册分类复习专项强化练习及答案.docx
-
一文看懂机械图纸中的尺寸标注.docx
-
消防综合训练手册12演示教学.docx
-
医疗美容机构基本标准.docx
-
英语人教版五年级下册unit2.docx
-
小学一年级上册品德与生活全册教案.docx
-
小学一升二语文讲与练.docx
-
小学语文读写结合以读促写研究课题方案.docx
-
用c语言求解n阶线性矩阵方程axb的简单解法.docx
-
熊猫基地导游词实用模板.docx
-
小一语文s版下册教案.docx
-
运动会秩序册.docx
-
优秀房地产中介机构评选方案.docx
