 喷涂机器人操作手册Word下载.docx
喷涂机器人操作手册Word下载.docx
- 文档编号:3633509
- 上传时间:2023-05-02
- 格式:DOCX
- 页数:23
- 大小:1,012.51KB
喷涂机器人操作手册Word下载.docx
《喷涂机器人操作手册Word下载.docx》由会员分享,可在线阅读,更多相关《喷涂机器人操作手册Word下载.docx(23页珍藏版)》请在冰点文库上搜索。
与其他急停按钮作用相同,用于紧急情况停止设备。
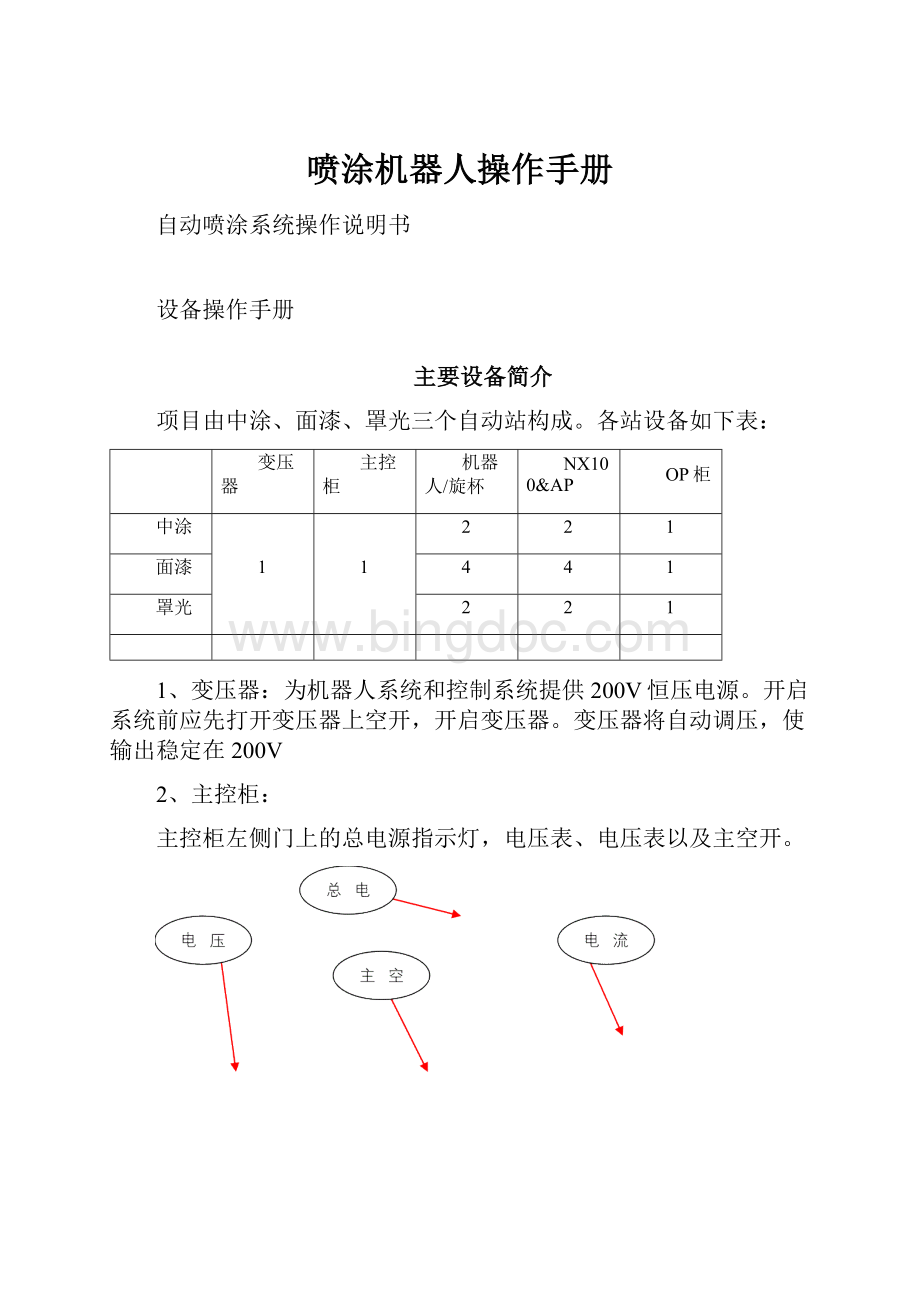
3、机器人/旋杯:
喷涂执行设备。
4、NX100&
AP:
机器人控制柜以及喷涂系统的空气配置柜。
NX100用于机器人操作、示教、控制等。
AP用于给旋杯系统,换色阀系统配置气源。
5、OP柜:
操作盘和人机界面是生产过程中对机器人喷涂线的操作和监控的最重要方式,也是生产线得以正常运行的重要部分。
操作者需熟练掌握各开关、按钮、指示灯的作用和意义以及相关操作。
以下以面漆四台机器人为例,介绍各OP柜上各元件的作用及意义:
各机器人选择、示教、再现选择开关
L1、L2、R1、R2分别对应生产线上的四台机器人。
每个机器人都有连个状态:
示教状态和再现状态(自动运行状态)。
画面中四个开关均为三位置开关,分别对应每台机器人的每种状态,由此可对每台机器人进行独立的手动操作和再现运行操作。
三位开关的“选择”位:
当开关打到此位置时,对应机器人可进行相应的手动清洗、手动充填等操作。
当四个三位开关全部处于“示教”位置时,手动操作对应全部机器人,而不需要将每台机器人打到选择位置。
三位开关的“示教”位:
当机器人打到该位置时,可对对应机器人进行示教操作。
三位开关的“再现”位:
当机器人打到该位置时,可对对应机器人进行再现操作。
喷涂停止启动两位开关
此开关开启、关闭旋杯旋转。
与“选择、示教、再现”开关配合使用可单独或选择多台机器人同时开启旋杯旋转。
机器人启动按钮
该按钮用于启动机器人。
当机器人打到再现状态时,点击此开关将使机器人处于再现状态。
此开关仅对处于“选择、示教、再现”三位开关处于再现位置的机器人起作用。
此开关带有指示灯,当机器人全部处于再现模式后,该开关指示灯常亮;
全不在再现状态时指示灯熄灭;
至少有一台机器人在再现状态时指示灯闪烁。
清洗填充手动、自动两位开关
当此开关处于手动位置时,可对已选择的机器人进行手动清洗或充填操作,当机器人“选择、示教、再现”三位开关全处于示教位置时,可同时对全部机器人进行清洗或充填操作。
机器人启动之前,此开关必须处于自动位置。
这样机器人启动后,会在自动进行清洗,充填,杯头清洗等动作。
高压停止启动两位开关.
此开关必须在“喷涂停止启动”两位开关处于启动位置时起作用。
此开关用于开启旋杯高压。
手动清洗按钮
清洗充填手动自动两位开关处于手动位置且“喷涂停止启动”按钮处于启动位置时,按此开关可对处于选择位置的机器人进行手动清洗动作。
当“选择、示教、再现”三位开关全部处于示教位置时,可对全部机器人进行手动清洗动作。
此开关带有指示灯,当没进行手动清洗时此开关熄灭;
当全部机器人进行手动清洗时,此开关常亮;
当至少有一台机器人进行手动清洗时,此开关闪烁。
手动充填
使用方法以及显示状态与手动清洗按钮一致。
机器人示教指示灯
当所有机器人都处于示教位置时,指示灯常亮;
当所有机器人都不处于示教位置时,指示灯熄灭;
至少一台机器人处于机器人处于示教位置时,指示灯闪烁。
机器人原点指示灯
指示灯状态与“机器人示教”指示灯一致。
机器人再现指示灯
喷杯清洗指示灯
该指示灯只有在自动清洗状态下点亮。
当至少一台机器人处于自动清洗,杯头清洗,换色清洗充填时,指示灯闪亮;
当全部机器人处于自动清洗,杯头清洗,换色清洗充填时,指示灯常亮;
其他情况指示灯熄灭。
输送链运行指示灯
该站报警,或者输送链停止运行两位开关处于停止位置并且输送链连锁释放两位开关处于连锁位置时,将使输送链停止。
此外本站MIP工位远端设备也能停止输送链。
当以上条件都处于输送链运行状态时,指示灯常亮;
当本站无报警且输送链停止运行两位开关处于运行位置且鸵鸟毛和MIP工位至少一站处于输送链停止位置时指示灯闪烁;
当远端设备处于输送链停止位且本站也处于输送链停止状态时,指示灯熄灭。
输送链联锁释放两位开关
开关处于联锁位置时,MIP工位能够控制输送链停止,OP柜可通过“输送链停止、运行”两位开关控制输送链;
开关处于释放位置时,MIP工位将不能停止输送链,OP柜停止输送链应将此开关打到连锁位置,并且将“输送链停止、运行”开关处于停止位置。
此开关正常生产情况下应处于“联锁”位置,只有当系统已停止并且系统完成工作后才能将开关打到释放位置。
输送链停止运行两位开关
此开关用于“输送链联锁释放”两位开关处于连锁位置时,控制输送链的启动,停止。
灯测试按钮
此按钮用于测试OP柜上所有指示灯。
按下此按钮,所有指示灯点亮。
报警复位按钮
此按钮用于复位报警,复位报警前,必须解除报警信息所显示的报警。
蜂鸣器停止按钮
此按钮可停止蜂鸣器,即使报警没有解除,也可通过此按钮停止报警蜂鸣器。
系统急停按钮
此按钮用于紧急停止设备。
按下此按钮,所有设备将停止运行。
解除急停应将此按钮顺时针旋转。
人机界面概要
系统要正常运行,上面的状态显示必须正常。
点击登陆按钮,弹出登陆对话框。
为用户设置的用户名为操作员(该登陆不区分大小写),初始密码为123456。
登陆成功后当前用户将显示登录用户。
由于画面中相关操作设计到权限问题,为防止他人误操作,请操作员离开前务必点击注销按钮,注销用户登陆。
一、初始界面
此画面为开机初始界面,有标题栏,登陆,菜单栏、状态栏以及LOGO画面。
界面下方表明了站名:
中涂、面漆、清漆,以及一些常用的信号指示灯和操作按钮。
意义如下:
1.MCP急停:
主控柜急停,指示状态同OP柜急停开关,按下时闪烁。
2.有人闯入:
喷房出口处人身检测开关报警,因喷房入口出口有喷漆工位未应用人身检测。
3.OP急停:
OP柜急停开关。
指示状态同OP柜急停开关,按下时闪烁。
4.输送链:
此指示灯为输送链系统传送的信号,当输送链运行时指示灯显示为绿色,停止时显示为暗绿色。
5.火警:
此指示灯为消防系统传送的信号。
当消防系统正常时,该信号为暗红色,当有火警发生时为红色。
6.MIP急停:
MIP手动输入盘急停按钮指示状态,同OP柜急停开关,按下时闪烁。
7.报警:
此操作按钮与画面左侧“故障报警”按钮功能相同,鼠标单击将打开故障报警画面,同时有报警发生时,该图标会闪烁显示。
8.打印:
该按钮用来打印当前画面中显示的内容。
主要用来打印喷涂数据等需要保存备份的重要数据。
9.程序:
单击该按钮将打开三菱编程器。
10.退出:
单击该按钮将退出HMI系统。
二、生产线画面
点击“生产线”可进入如下画面:
1:
机器人状态及旋杯参数反馈值。
原点中:
指示对应机器人原点状态。
若在原点则显示为绿色,不在原点显示为灰色。
示教中:
指示对应机器人的示教状态。
若为示教状态则显示为绿色,不在示教状态显示为灰色。
运行中:
指示对应机器人的再现是否选择。
若选择为再现方式则显示为绿色,未在再现方式则为灰色。
示教锁:
指示对应机器人示教盘上示教锁是否打开。
若打开示教锁则显示为绿色,未打开显示为灰色。
运行状态:
指示对应机器人的运行状态。
处于自动运行状态时表示为绿色,未处于自动运行状态时表示为灰色。
流量:
显示喷涂过程中,旋杯的流量。
单位为:
毫升
转速:
显示旋杯的实际转速。
单位为:
千转
高压:
显示旋杯的实际静电电压。
千伏
电流:
显示旋杯的电流反馈值。
微安
2:
塔灯。
此灯显示与OP柜上塔灯显示相同信息。
黄色:
机器人原点位置。
常亮状态表示该站机器人全部在原点;
闪烁状态表示该站至少有一台机器人不在原点位置;
熄灭状态表示该站所有机器人都不在原点位置。
蓝色:
旋杯高压。
常亮状态表示该站所有旋杯已开启高压;
闪烁状态表示该站至少一只旋杯未开始高压;
熄灭状态表示该站所有旋杯均未开启高压
绿色:
机器人再现模式。
常亮状态表示该站所有机器人均处于再现模式;
闪烁状态表示该站至少一台机器人未在再现模式;
熄灭状态表示该站所有机器人均未在再现模式。
红色:
生产线报警。
生产线任何一个或多个报警都将使该指示灯常亮,直到报警解除并复位。
3:
行程开关及对应的编码器计数值。
LS1:
显示数值为输送滑撬进入自动喷房时碰到第一个行程开关时开始计算滑撬移动的距离。
此行程开关功能为比较车体数据和为运行到位后给机器人启动信号。
。
LS2:
显示数值为输送滑撬进入自动喷房时碰到第二个行程开关时开始计算滑撬移动的距离。
此行程开关功能为运行到位后给机器人启动信号。
(中涂、清漆站没有LS2)
4:
车体信息排队。
每个车体上都载有该位置车体的车型、颜色数据。
此数据作为机器人选择颜色和示教程序的根据。
其中车型和颜色为99时,意味着该滑撬上没有车体,机器人不启动。
当前面的车型、颜色数据为0时,后面的车型、颜色数据将自动前移。
5:
AutoID。
此设备用于自动识别车型。
识别车型与MIP输入盘上的数据作比较,如果不相同,则产生报警,以确保每个车型数据的准确。
6:
MIP车型、颜色。
此处显示的是MIP控制盘上所输入的车型,颜色数据。
7:
全部暂停。
用于紧急情况下急停设备。
8:
喷枪禁止:
用于在不喷涂时关闭喷枪,主要用于车身部分喷涂的情况。
9:
光电管计数.
车型识别的依据,物体挡光电时计数递增。
三、联锁画面
点击操作栏的联锁画面,可进入联锁信号显示画面。
连锁信号表示方法为:
当信号为ON时,显示为绿色;
信号为OFF时显示为红色。
画面如下:
1、机器人连锁信号:
画面中显示机器人系统和控制系统之间所有的信号,其中I部分为机器人系统传给PLC控制系统的信号,Q部分为PLC控制部分传给机器人系统的信号。
2、车型识别:
画面中显示车型识别系统和链条运行时光电计数的数据,其中1部分为界定车身长度的相应光电计数区间,2部分为光电实际计数。
注意:
车型识别使用时,如人为推车过光电或是人身挡光电均会引起光电计数错误,容易识别车型错误。
3、喷枪维护
为便于机器人本体清洁及更换机器人衣服以及检修时方便,设定此喷枪维护动作。
具体操作步骤如下:
1、检查确认喷房内无车身及其他物体阻挡;
2、将机器人开关打到再现位置,自动清洗开关打到右侧位置;
3、按机器人启动按钮启动系统;
4、在喷枪维护画面上点击相应的喷枪维护按钮指示灯变绿后点击同行的开始按钮,则机器人自动动作到喷枪维护位置;
5、喷枪维护时要注意关断高压、喷杯、拆卸旋杯时要关断主空气和MICROPAKCONTROLLER高压;
6、喷枪维护结束时点击相应的喷枪维护及开始按钮指示灯变红后按第一行结束按钮;
7、点击信号复位按钮呆红灯变绿后点击同一行开始按钮则机器人可自动动作回原点。
四、旋杯画面
旋杯的动作界面显示了清洗或喷涂过程中溶剂、空气和涂料等在管路内流动及电磁阀通断的情况。
对应的阀打开时显示为绿色;
关闭时显示为红。
右上角的表格显示设定喷涂参数和反馈值,AUTOBELL为自动清洗杯头间隔车身数设置。
点击右侧按钮时可进行相应的手动操作同OP柜上按钮作用相同,按下时红灯变绿灯。
按下手动选择时可单独对溶剂伐、空气阀等进行操作。
五、喷涂设定
喷涂表用来设置机器人喷涂点数据,根据喷涂点的不同机器人调用不同的喷涂数据进行喷涂。
点击三个下拉列表框,选择机器人,车型,颜色,确定喷涂表,可以手动输入喷涂点数据,点击“下载”按钮将弹出对话框确认是否下载当前数据,数据将始终保存在PLC中。
下载时请注意机器人、车型、颜色三个参数的对应,以免下载错误数值。
当需要调整某些数值时,可选择相应的机器人、车型、颜色后点击上传按钮,HMI将读出PLC中的喷涂参数,修改好后,点击下载。
导出按钮用来将数据以图片形式打印至文件夹备份,防止数据丢失。
该图片将保存在项目文件夹中的PRT_OUT文件夹中,文件以打印时间命名。
六、清洗设定
清洗设定中包含了7个表格。
BELLCUP为杯头清洗表;
BLOW为吹扫设定表;
Fillmanual为手动充填表;
Rising为手动清洗表。
其中清洗表SEQ1-3可设定三组不同的清洗参数。
应用时可根据不同颜色调用不同的清洗参数,如果清洗条件适合所有颜色,也可仅使用一种清洗参数。
BELLCUP杯头清洗表:
设定的参数仅用来清洗旋杯。
每台机器人每次喷涂完成后都将进行杯头清洗。
Rising手动清洗表:
除了机器人换色进行自动清洗外,还可进行手动清洗,以保证长时间未生产时机器人喷涂管路的清洁。
手动清洗时调用该参数表。
BLOW吹扫设定表:
设定的参数用于维护旋杯、拆卸旋杯前管路清理。
Fillmanual手动充填表:
设定的参数用于手动充填涂料。
配比表:
用来设定清洗表的选择、喷涂参数的比例等。
CCV.NO指示机器人所喷涂的颜色。
RinsingSeq用来选择对应的清洗表,其中杯头清洗表为BELLCUP,手动清洗表为Rising。
Flowrate,Atomrate,Shapingrate,H.Vrate可设定数值来确定相应颜色下所使用的喷涂表数值的百分比。
七、生产统计
该表用来统计当天或特殊时段生产情况,对应颜色和车型的车分别生产多少台,将显示在对应的表格里面。
并在生产报表中进行累加。
每台车身都可统计具体的时间的生产情况,以进行当天或者特殊时段的生产统计。
可选项为日期选择、车型选择、颜色选择,选择后点查询按钮即可。
八、故障报警
故障报警画面组态了大量报警信息,帮助操作者快速排除报警。
一旦报警发生,操作者可先停止输送链,关闭蜂鸣器提示音,然后点击该画面,报警信息将显示在表格中。
红色信息表示正在报警的信息;
黄色信息表示报警信息发生后未进行排除而点击了报警复位按钮,此时蜂鸣器将再次想起,提示操作者将报警信息排除;
绿色信息表示报警已解除,并且进行了报警复位操作。
当报警画面显示的信息全为绿色后,操作者可根据现场情况继续进行生产操作。
报警信息包含报警时间。
此外该界面还可查询历史报警信息,用来分析设备总体运行情况。
启动机器人步骤
启动机器人之前请检查:
1.确认远程模式及原点中信号到位,如不在原点请手动调节机器人位置,使其回到原点。
2.确认机器人示教盘上示教锁没有打开。
3.确定系统所有报警已解除,喷房内不得有人以免造成事故,仔细检查托架距离行程开关距离。
并确认HMI生产线画面上的LS1、LS2两个数值都为0并且对应的行程开关颜色都为红色。
不为红色时,可按计数清零复位。
4.仔细检查HMI车型排队画面,确认与实际车型相符。
5.严格禁止人为触动输送链行程开关否则可能引起数据混乱,机器人误动作。
6.过车不喷涂时,关掉喷房机器人。
7.确认无积放,或喷房内脱钩情况。
8.对于积放情况的特殊处理:
一旦发生积放,应立即停止链条运行。
确认当前正在喷涂的车身可以正常喷涂完成后,可运行链条喷完该车身;
如不能则需要手动示教将机器人示教回原点,并执行RESET示教程序,方法为点击菜单,选中“选择程序”,光标移到RESET程序按选择进入程序,光标移到程序第一行,启动伺服后按连锁+试运行执行到最后一行,将示教三位开关扳到REMOTE。
如不需手动回原点,再启动前要检查车型排队数据是否正确,确认积放解决后再启动。
9.启动前必须保证机器人启动行程LS1和LS2计数正确,如不正确则需要在前一辆车后连杆离开行程开关和后一辆车前连杆接触行程开关之间将行程计数清零。
启动机器人:
1.将HMI打到生产线画面。
2.将“喷涂停止、启动”两位开关打到启动位置。
3.将机器人“选择、示教、再现”三位开关打到再现位置,此时生产线画面上机器人运行中指示点亮。
4.将“清洗充填手动、自动”两位开关打到自动位置。
5.将“高压停止、启动”两位开关打到启动位置。
6.点击机器人启动按钮。
检查生产线画面上的“运行状态”指示。
该指示点亮表明所有机器人都正常启动。
7.开启输送链,开始生产。
MIP手动输入盘介绍
MIP手动输入盘用来输入车型数据和颜色,请务必正确输入车型数据避免机器人做出错误动作。
正确操作方法:
1.输入车型数据:
按下车型按钮,车型按钮指示灯亮,按数字键该数字键指示灯亮,此时按下数据输入按钮,则车型数据输入,车型显示表显示当前车型数据,同时数字按钮和车型按钮指示灯将熄灭。
当行程开关检测到托架605厘米后,经过自动识别后数据将自动上传给PLC。
2.输入颜色数据:
按下颜色按钮,颜色按钮指示灯亮,按数字键该数字键指示灯亮,此时按下数据输入按钮,则颜色数据输入,同时数字按钮和颜色按钮指示灯将熄灭。
颜色显示表显示当前颜色数据。
当行程开关检测到托架605厘米后,数据自动上传给PLC。
3.是否通过
当达到“否”位置时,用户可输入车型,颜色。
当达到“是”位置时车型颜色均显示“99”,表示该托架为空托架。
此托架经过机器人时,机器人不做喷涂动作。
4.是否锁定
当是否锁定选择开关打到“否”位置时,每过一个托架则数据清零一次,用户必须手动输入下一个车型数据,当打到“是”位置时,数据不清零,用户不必每次都输入数据,只须在车型数据改变时输入就可。
5.输送链停止、运行
操作盘站可停止输送链,以便有足够时间打磨、擦净。
6.灯测试
此开关可检测各指示灯是否正常
7.蜂鸣器停止
该按钮可停止MIP盘上的蜂鸣器。
8.报警复位
该复位按钮仅可复位车型输入错误报警。
9.系统急停
与其他急停按钮用法相同。
日常清洁维护小常识
生产前:
1、检查杯头是否拧紧;
2、检查空气(大于0.6MPa)、油漆(6公斤)、溶剂(6公斤)压力是否正常;
3、检查是否清洁良好,杯头是否有积漆,旋杯下方是否已清洁;
4、检查旋杯及手臂处有无积漆,如有则定时进行清理。
生产后:
1、每天生产结束后必须手动清洗2次以上;
2、每天生产结束后拆下杯头浸泡至少40分钟;
3、每天生产结束后需清洁成型空气罩及喷嘴、杯头清洗管出口;
4、每天生产结束后需清洁旋杯外表面及积漆较多的位置;
5、如在积漆较多的位置包裹塑料布则需要根据实际情况定时清理更换,否则容易下滴到车身上造成车身质量问题。
名词注解
MIP:
手动输入盘;
AUTOID:
自动识别;
AP柜:
气动柜;
OP柜:
操作柜;
NX100:
机器人控制柜;
HMI:
人机界面;
REMOTE:
远程。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 喷涂 机器人 操作手册
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
-
证券投资顾问业务暂行规定.docx
-
知识产权法司法考试历年真题及答案解析.docx
-
职业道德的复习重点.docx
-
志愿者活动心得精选多篇.docx
-
治理雾霾应重视大气静电学说.docx
-
中国成人脑死亡判定标准与操作规范第二版.docx
-
中国名牌产品申请表.docx
-
中国纸板产业深度调研及产业投资评估报告.docx
-
中考化学考点分类解析导学案14第3讲碳和碳的氧化物1碳单质的物理性质和用途.docx
-
中学学年度第二学期学校工作计划.docx
-
中英文安全标语word版本 26页.docx
-
重庆市高考英语试题.docx
-
注册安全工程师《安全生产管理知识》真题及答案.docx
-
装机必备硬件基础知识再接再厉完成装机.docx
-
子部.docx
-
总结范文骨干教师培训总结15篇.docx
-
最新 Marlin固件全中文解析.docx
-
最新部编版三年级语文上册第24课《司马光》教学设计.docx
-
最新二年级数学上册寒假作业全面系统146.docx
-
最新猴年祝贺词大全 精品.docx
-
最新入党思想报告3000字范文思想汇报文档五篇.docx
-
《OTL功率放大器的制作与调试》项目教学设计方案.docx
-
《化学方程式》单元检测2.docx
-
中考语文阅读精品题.docx
-
工伤司法鉴定标准是怎样的.docx
-
公共事务管理硕士在职专班入学研究计画书.docx
-
公考必备《行测》数量关系题库.docx
-
股票技术指标详解二.docx
-
人教版数学六下第二单元《百分数二》word教案精品教案.docx
-
简大型机房建设系统全套设计方案.docx
-
建筑工程基础加固与纠偏处理应用探讨.docx
-
关于会计工作计划模板锦集九篇.docx
-
阜蒙县公安局常规普通通信指挥车设备配置及技术指标要求.docx
-
关于我的理想的作文范文精选13篇.docx
-
尔雅社会心理学课后习题.docx
-
甘肃省兰州市届高三下学期实战考试英语试题 Word版含答案.docx
-
观众伤害赔偿.docx
-
二年级品德与生活上册全册教案冀教版.docx
-
钢结构检验批表1.docx
-
灌溉工程经济效益分析方法.docx
-
高二生物上册知识点限时规范训练题10.docx
-
高考辨析并修改病句专题复习教案.docx
-
二年级音乐修改课件.docx
-
高考历史 黄金易错点专题汇编 专题07 近代中国的反侵略 求民主的潮流.docx
-
法务工作总结开头.docx
-
高考通史复习要点 1.docx
-
高考英语全国卷2附答案解析word文档良心出品.docx
-
高考真题天津卷理综答案.docx
-
范文日 30万留学生计划.docx
-
高三化学寒假作业1.docx
