 工业机器人模拟试题.docx
工业机器人模拟试题.docx
- 文档编号:15123456
- 上传时间:2023-07-01
- 格式:DOCX
- 页数:41
- 大小:87.13KB
工业机器人模拟试题.docx
《工业机器人模拟试题.docx》由会员分享,可在线阅读,更多相关《工业机器人模拟试题.docx(41页珍藏版)》请在冰点文库上搜索。
工业机器人模拟试题
工业机器人模拟试题
1.现代科学革命是由()拉开序幕的。
A、牛顿力学和哥白尼日心说
B、道尔顿原子论和达尔文进化论
C、量子力学和爱因斯坦相对论(正确答案)
D、系统论和耗散结构理论
2.对于有规律的轨迹,仅示教几个特征点,计算机就能利用()获得中间点的坐标。
A、优化算法
B、平滑算法
C、预测算法
D、插补算法(正确答案)
3.设位置的确定精度为0.02mm.滚珠丝杠每转一转,滚珠螺母移动5mm,减速比为Z1/Z2=1/10,则每转一转对应的脉冲数应为()。
A、50个脉冲/转
B、100个脉冲/转
C、250个脉冲/转
D、25个脉冲/转(正确答案)
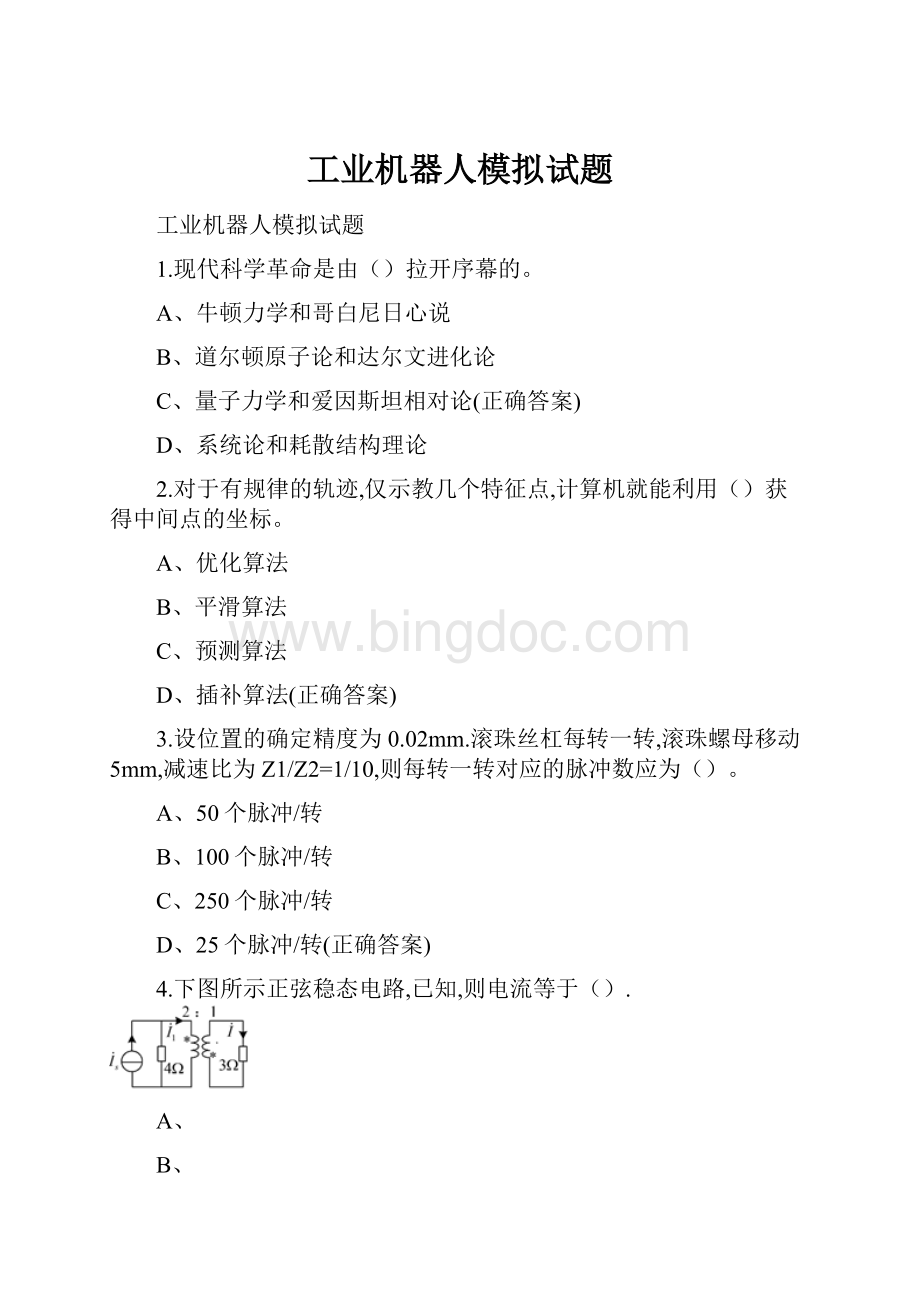
4.下图所示正弦稳态电路,已知,则电流等于().
A、
B、
C、(正确答案)
D、
5.下图所示电路,其品质因数Q等于().
A、40
B、50(正确答案)
C、80
D、100
6.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()Ω.
A、(1-j1)(正确答案)
B、(1+j1)
C、(1-j2)
D、(1+j2)
7.下图所示电路中,a、b两端的等效电阻为().
A、2Ω(正确答案)
B、6Ω
C、8Ω
D、10Ω
8.分析下图所示电路,A元件是().
A、负载(正确答案)
B、电源
C、电容
D、电感
9.下图所示电路中AB两点间的等效电阻与电路中的RL相等,则RL等于().
A、40Ω
B、30Ω
C、20Ω(正确答案)
D、100
10.电压、电流、有功功率、能量的单位分别是()。
A、伏特,安培,瓦特,焦耳(正确答案)
B、安培,伏特,法拉,焦耳
C、安培,伏特,亨利,焦耳
D、伏特,安培,欧姆,焦耳
11.整机安装的基本要求:
保证导通与绝缘的电器性能,保证机械强度,保证()。
A、装配的要求
B、散热的要求
C、传热的要求(正确答案)
D、性能的要求
12.主视图是()所得的视图。
A、由左向右投影
B、由右向左投影
C、由上向下投影
D、由前向后投影(正确答案)
13.左视图是()所得的视图。
A、由左向右投影(正确答案)
B、由右向左投影
C、由上向下投影
D、由前向后投影
14.平面体的截交线为封闭的(),其形状取决于截平面所截到的棱边个数和交到平面的情况。
A、立体图形
B、直线
C、回转体图形
D、平面图形(正确答案)
15.蜗杆传动中效率最高的是()。
A、单头蜗杆
B、双头蜗杆
C、三头蜗杆
D、四头蜗杆(正确答案)
16.机械零件的设计准则有()。
A、温度准则
B、强度准则(正确答案)
C、耐磨性准则
D、等寿命准则
17.被联接件之一太厚不宜制成通孔,且需要经常拆卸时,往往采用()。
A、螺栓联接
B、螺钉联接
C、紧定螺钉联接
D、双头螺柱联接(正确答案)
18.气动仪表中,()将检测气信号转换为标准气信号。
A、变送器(正确答案)
B、比值器
C、调节器
D、转换器
19.每千克质量的干空气中所混合的水蒸气的质量称为()。
A、绝对湿度
B、相对湿度
C、含湿量(正确答案)
D、析水量
20.在定量泵-变量马达的容积调速回路中,如果液压马达所驱动的负载转矩变小,若不考虑泄漏的影响,试判断马达转速()。
A、增大(正确答案)
B、减小
C、基本不变
D、无法判断
21.在调速阀旁路节流调速回路中,调速阀的节流开口一定,当负载从F1降到F2时,若考虑泵内泄漏变化因素时液压缸的运动速度v()。
A、增加(正确答案)
B、减少
C、不变
D、无法判断
22.当控制阀的开口一定,阀的进、出口压力差ΔP>(3~5)ⅹ105Pa时,随着压力差Δp增加,压力差的变化对对调速阀流量变化的影响()。
A、越大
B、越小
C、基本不变(正确答案)
D、无法判断
23.为保证锁紧迅速、准确,采用了双向液压锁的汽车起重机支腿油路的换向阀应选用()中位机能。
A、H型(正确答案)
B、M型
C、D型
D、P型
24.液压缸的种类繁多,()不可作双作用液压缸。
A、柱塞缸(正确答案)
B、活塞缸
C、摆动缸
D、以上全部
25.已知单活塞杠液压缸的活塞直径D为活塞杆直径d的两倍,差动连接的快进速度等于快退速度的()。
A、1倍
B、2倍
C、3倍(正确答案)
D、4倍
26.容积调速回路中,()的调速方式为恒转矩调节。
A、变量泵—变量马达
B、变量泵—定量马达(正确答案)
C、定量泵—变量马达
D、以上都对
27.对于速度低、换向次数不多、而定位精度高的外圆磨床,则采用()液压操纵箱。
A、时间制动控制式
B、行程制动控制式(正确答案)
C、时间、行程混合控制式
D、其他
28.一水平放置的双伸出杆液压缸,采用三位四通电磁换向阀,要求阀处于中位时,液压泵卸荷,且液压缸浮动,其中位机能应选用()。
A、O型
B、M型
C、Y型
D、H型(正确答案)
29.工业机器人控制系统内部状态信息一般会通过不同颜色指示灯显示系统不同状态信息,一般用于显示警告故障信息的指示灯颜色是()。
A、蓝色
B、红色
C、黄色(正确答案)
D、橙色
30.要使机器人和人的功能更为接近,以便从事更高级的工作,要求机器人能有判断能力,这就要给机器人安装各类(),使机器人通过视觉对物体进行识别和检测,通过触觉对物体产生压觉、力觉、滑动感觉和重量感觉.这类机器人被称为智能机器人。
A、控制器
B、示教器
C、驱动器
D、传感器(正确答案)
31.机器人本体是工业机器人机械主体,是完成各种作业的()。
A、执行机构(正确答案)
B、控制系统
C、传输系统
D、搬运机构
32.机器人的()是指单关节速度。
A、工作速度
B、最大运动速度
C、运动速度(正确答案)
D、最小运动速度
33.触发机器人自动停止信号,()。
A、无论机器人在何种运行模式,都会立即停止
B、机器人在自动运行模式,才会停止(正确答案)
C、机器人在手动运行模式,才会停止
D、机器人在100%手动运行模式,才会停止
34.电器设备铭牌上所标出的电压、电流值都是指()。
A、最大值
B、有效值(正确答案)
C、瞬时值
D、平均值
35.世界上首台带有人工智能的移动机器人的名字是()。
A、Shakey(正确答案)
B、Dante
C、Topping
D、Handy
36.皮带平行传动中的两个轮,当小轮作为主动轮顺时针转动时,大轮将()。
A、按顺时针转动(正确答案)
B、按逆时针转动
C、不转动
D、先顺时针转动,再逆时针转动
37.()是指传感器在整个测量范围内所能辨别的被测量的最小变化量。
A、灵敏度
B、重复性
C、精度
D、分辨率(正确答案)
38.()光纤式传感器只能检测出不透明物体,对透明或半透明的物体无法检测。
A、射束中断型(正确答案)
B、回射型
C、扩展型
D、集中型
39.利用声波的传递和反射这一原理制作的传感器是()。
A、光纤式传感器
B、超声波传感器(正确答案)
C、电涡流式传感器
D、触觉传感器
40.()传感器用于检测机器人作业对象及作业环境状态的传感器,也就是测量机器人本身以外传感器。
A、内部
B、外部(正确答案)
C、电子
D、电磁
41.编码器按照码盘刻孔方式分为()。
A、增量式编码器和减量式编码器
B、增量式编码器和绝对式编码器(正确答案)
C、相对式编码器和绝对式编码器
D、相对式编码器和减量式编码器
42.编码器检测部分的作用是()。
A、检测平行光
B、检测电信号
C、变成电信号输出
D、检测平行光,变成电信号输出(正确答案)
43.编码器的发射部分的作用是()。
A、发出平行光(正确答案)
B、发出电信号
C、发出磁信号
D、处理平行光
44.RV减速器的行星轮有多种数量,常见的是()。
A、.1个和2个
B、2个和3个(正确答案)
C、3个和4个
D、4个和5个
45.RV减速器具有()个摆线轮,并相距180°。
A、1
B、2(正确答案)
C、3
D、4
46.谐波减速器传动比范围大,一般传动比i为()。
A、20—50
B、50—100
C、75—500(正确答案)
D、200—1000
47.在谐波减速器中,一般刚轮比柔轮()。
A、多一齿
B、少一齿
C、多二齿(正确答案)
D、少二齿
48.一般把动力输入的轮称为主动轮,把输出动力的轮称为从动轮,而传动比i就等于()。
A、主动轮转速比上从动轮转速(正确答案)
B、从动轮转速比上主动轮转速
C、大轮转速比上小轮转速
D、小轮转速比上大轮转速
49.机器人吸附式执行器分为()。
A、机械式夹持器、专用工具
B、磁吸式执行器、电吸式执行器
C、磁吸式执行器、气吸式执行器(正确答案)
D、电吸式执行器、气吸式执行器
50.机械式夹持器按照夹取东西的方式不同,分为(V)两种。
A、内夹式夹持器和外撑式夹持器(正确答案)
B、内撑式夹持器和外夹式夹持器
C、内夹式夹持器和外夹式夹持器
D、内撑式夹持器和外撑式夹持器
51.灵活工作空间用字母()表示。
A、W(p)
B、Wp(p)(正确答案)
C、Ws(p)
D、Wp(s)
52.末端执行器以任意姿态达到的点所构成的工作空间称为()。
A、灵活工作空间(正确答案)
B、次工作空间
C、工作空间
D、奇异形位
53.()指总工作空间边界上的点所对应的机器人的位置和姿态。
A、末端执行器
B、TCP
C、工作空间
D、奇异形位(正确答案)
54.()指末端执行器的工作点。
A、末端执行器
B、TCP(正确答案)
C、工作空间
D、奇异形位
55.()指连接在机器人末端法兰上的工具,也就是指机器人的手部。
A、末端执行器(正确答案)
B、TCP
C、工作空间
D、奇异形位
56.()是原点安装在机器人末端的工具中心点(TCP)处的坐标系,原点及方向都是随着末端位置与角度不断变化的。
A、基坐标系
B、大地坐标系
C、关节坐标系
D、工具坐标系(正确答案)
57.在机器人坐标系的判定中,我们用拇指指向()。
A、X轴
B、Y轴
C、Z轴(正确答案)
D、A轴
58.转动关节允许两相邻连杆绕关节轴线做相对转动,这种关节具有()个自由度。
A、1(正确答案)
B、2
C、3
D、4
59.工业机器人在各行业应用中,用于涂胶的机器人,我们称为()。
A、焊接机器人
B、喷涂机器人(正确答案)
C、装配机器人
D、码垛机器人
60.工业机器人在各行业应用中,用于焊接的机器人,我们称为()。
A、焊接机器人(正确答案)
B、喷涂机器人
C、装配机器人
D、码垛机器人
61.由数控机床和其它自动化工艺设备组成的(),可以按照任意顺序加工一组不同工序与不同节拍的工件,并能适时地自由调度和管理。
A、刚性制造系統
B、柔性制造系统(正确答案)
C、弹性制造系统
D、挠性制造系统
62.人们实现对机器人的控制不包括()。
A、输入
B、输出
C、程序(正确答案)
D、反应
63.机器人的英文单词是()。
A、Botre
B、boret
C、robot(正确答案)
D、rebot
64.机器人语言是由()表示的"0"和"1"组成的字串机器码。
A、二进制(正确答案)
B、十进制
C、八进制
D、十六进制
65.1999年日本索尼公司推出犬型机器人叫()。
A、SIBO
B、AIBO(正确答案)
C、ASIBO
D、QRI0
66.我国首届机器人足球比赛是在()举行的。
A、哈尔滨(正确答案)
B、北京
C、上海
D、广州
67.机器人速度的单位是()。
A、cm/min
B、in/min
C、mm/sec(正确答案)
D、in/sec
68.对于长期没有使用的机器人,使用时正确的操作是()。
A、直接编程调试
B、直接自动运行以前的程序
C、最好先进行机械原点的校准(正确答案)
D、快速手动操作各关节轴
69.IP防护等级后的两位数,第一位数字表示()。
A、防止固体异物进入的等级(正确答案)
B、防止进水的等级
C、既代表防止固体异物进入的等级,又代表防止进水的等级
D、既不代表防止固体异物进入的等级,又不代表防止进水的等级
70.库卡工业机器人的商标是()。
A、ABB
B、KUKA(正确答案)
C、YASKAWA
D、FANUC
71.需要重启控制器,然后重新安装RAPID的启动方式是()。
A、重启
B、重置系统
C、重置RAPID(正确答案)
D、恢复到上次自动保存的状态
72.六轴机器人的工作速度指的是机器人在合理的工作负荷下匀速运动时机械接口中心或者工具中心点在单位时间内转动的角速度或者移动的距离,其中机械接口中心是指()。
A、底座四个螺栓孔对角线的焦点
B、第六轴法兰盘中心位置(正确答案)
C、既是底座四个螺栓孔对角线的焦点,也是第六轴法兰盘中心为止
D、既不是底座四个螺栓孔对角线的焦点,也不是第六轴法兰盘中心为止
73.用于异常情况下停止机器人运动,需要操作()。
A、触摸屏
B、控制摇杆
C、紧急停止按钮(正确答案)
D、重置按钮
74.提供某种信息(如标明安全设施或场所旁)的图形标志选择()。
A、禁止类标识牌
B、警告类标识牌
C、指令类标识牌
D、提示类标识牌(正确答案)
75.国际上机器人四大家族指的是().①瑞典ABB;②日本FANUC;③日本YASKAWA;④德国KUKA;⑤日本OTC
A、①②③④(正确答案)
B、①②③⑤
C、②③④⑤
D、①③④⑤
76.绝对式光电编码器其分辨率取决于二进制编码的()。
A、位数(正确答案)
B、码道
C、0
D、1
77.基于C语言编程技术中,()属于合法标识符。
A、8my_word
B、my_time(正确答案)
C、for
D、abc.c
78.能够检测压力的机器人传感器是()。
A、光敏阵列、CCD
B、光电传感器
C、微动开关、薄膜接点
D、压电传感器(正确答案)
79.轮式移动机构适用于在()高速和高效地移动。
A、小台阶
B、草地
C、沟壑
D、规则硬路面(正确答案)
80.机器人手臂的伸缩、升降及横向移动都属于直线运动,下列运动不属于直线运动的是()。
A、活塞气缸
B、活塞油缸
C、齿轮齿条
D、连杆机构(正确答案)
81.工业机器人手臂的重合运动多数用于动作程序()的专用机器人。
A、固定不变(正确答案)
B、灵活变动
C、定期改变
D、无法
82.铰接四杆机构有曲柄的条件有()个。
A、1
B、2(正确答案)
C、3
D、4
83.国内外PLC各生产厂家都把()作为第一用户编程语言。
A、梯形图(正确答案)
B、指令表
C、逻辑功能图
D、C.语言
84.微机中的中央处理器包括控制器和()。
A、ROM
B、RAM
C、存储器
D、运算器(正确答案)
85.保护接地用于中性点()供电运行方式。
A、直接接地
B、不接地(正确答案)
C、经电阻接地
D、经电感线圈接地
86.低压电缆的屏蔽层要(),外面要有绝缘层,以防与其他接地线接触相碰。
A、接零
B、接设备外壳
C、多点接地
D、一端接地(正确答案)
87.()能够实现往复式间歇运动。
A、槽轮
B、棘轮
C、凸轮(正确答案)
D、不完全齿轮
88.气动马达是将压缩空气的压力能转换成机械能的装置,它属于()元件。
A、动力
B、辅助
C、控制
D、执行(正确答案)
89.PLC的微分指令(或者叫沿指令)的作用是()。
A、信号保持
B、将长信号变为短信号(正确答案)
C、将短信号变为长信号
D、延时作用
90.一片容量为1024字节4位的存储器,表示有()个地址。
A、4
B、8
C、1024(正确答案)
D、4096
91.工业机器人控制系统的调度指挥机构是()。
A、计算机控制器(正确答案)
B、轴控制器
C、示教器
D、操作面板
92.为了获得非常平稳的加工过程,希望作业启动(位置为零)时:
()。
A、速度为零,加速度为零(正确答案)
B、速度为零,加速度恒定
C、速度恒定,加速度为零
D、速度恒定,加速度恒定
93.定时插补的时间间隔下限的主要决定因素是()。
A、完成一次正向运动学计算的时间
B、完成一次逆向运动学计算的时间(正确答案)
C、完成一次正向动力学计算的时间
D、完成一次逆向动力学计算的时间
94.轨迹规划是将所有的关节变量表示为()的函数。
A、位置
B、时间(正确答案)
C、速度
D、频率
95.谐波传动的缺点是()。
A、扭转刚度低(正确答案)
B、传动侧隙小
C、惯量低
D、精度高
96.一般工业机器人至少需要()个自由度,才能使手部达到活动范围内任意目标及姿态。
A、3
B、5
C、6(正确答案)
D、8
97.作业路径通常用()坐标系相对于工件坐标系的运动来描述。
A、手爪
B、固定
C、运动(正确答案)
D、工具
98.机器人的TCP测量是指()测量。
A、全局坐标
B、负载转矩
C、工具坐标原点(正确答案)
D、基坐标
99.机器人的精度主要依存于()、控制算法误差与分辨率系统误差。
A、传动误差
B、关节间隙
C、机械误差(正确答案)
D、连杆机构的挠性
100.低压熔断器,广泛应用于低压供配电系统和控制系统中,主要用于()保护。
A、短路(正确答案)
B、速断
C、过流
D、过压
101.热继电器的保护特性与电动机过载特性贴近,是为了充分发挥电机的()能力。
A、过载(正确答案)
B、控制
C、节流
D、发电
102.在PLC梯形图编程中,2个或2个以上的触点串联的电路称为()。
A、串联电路
B、并联电路
C、串联电路块(正确答案)
D、并联电路块
103.HMI是()的英文缩写。
A、HumanMachineIntelligence
B、HumanMachineInterface(正确答案)
C、HandMachineInterface
D、HumanMachineInternet
104.输出端口为()类型的PLC,只能用于控制交流负载。
A、继电器
B、双向晶闸管(正确答案)
C、晶体管
D、二极管
105.PLC将输入信息采入内部,执行()逻辑功能,最后达到控制要求。
A、硬件
B、元件
C、用户程序(正确答案)
D、控制部件
106.电容传感器中两极板间的电容量与()无关。
A、极板间相对覆盖的面积
B、极板间的距离
C、电容极板间介质的介电常数
D、极板的厚度(正确答案)
107.变频器输出侧不允许接(),也不允许接电容式电动机。
A、电容器(正确答案)
B、电阻
C、电抗器
D、三相异步电动机
108.如下图所示,将正弦电压u=10sin(314t+30°)V施加于阻值为5Ω的电阻元件上,则通过该电阻元件的电流为()A.
A、2sin314t
B、2sin(314t+30°)(正确答案)
C、2sin(314t-30°)
D、2sin(314t+60°)
109.下图所示电路中,端电压U为().
A、8V
B、-2V(正确答案)
C、2V
D、-4V
110.五色环电阻为棕、金、黑、棕、绿标注,该电阻的阻值是()。
A、5.1Ω
B、51Ω(正确答案)
C、510Ω
D、5.1KΩ
111.下列选项中,()不是串联电路的特点。
A、电流处处相同
B、总电压等于各段电压之和
C、总电阻等于各电阻之和
D、各个支路电压相等(正确答案)
112.用指针式万用表对三极管进行简易的测试时,万用表的选择开关应置于欧姆挡()、R×1k挡进行测量。
A、R×0.1
B、R×10
C、R×100(正确答案)
D、R×10
113.一个数据选择器的地址输入端有3个时,最多可以有()个数据信号输出。
A、4
B、6
C、8(正确答案)
D、16
114.下列十进制数与二进制数转换结果正确的是()。
A、(8)10=(110)2
B、(4)10=(1000)2
C、(10)10=(1100)2
D、(9)10=(1001)2(正确答案)
115.在门电路中,当决定一个事件的条件全部具备,事件才发生,该关系为()。
A、与逻辑(正确答案)
B、或逻辑
C、非逻辑
D、逻辑加
116.用万用表检测某二极管时,发现其正、反电阻均约等于1KΩ,说明该二极管()。
A、已经击穿
B、完好状态
C、内部老化不通(正确答案)
D、无法判断
117.下列材料中,导电性能最好的是()。
A、铝
B、铜(正确答案)
C、铁
D、玻璃
118.PE线或PEN线上除工作接地外,其他接地点的再次接地称为()接地。
A、直接
B、间接
C、重复(正确答案)
D、保护
119.ISO9000族标准与TQC的差别在于:
ISO9000族标准是从()立场上所规定的质量保证。
A、设计者
B、采购者(正确答案)
C、供应者
D、操作者
120.职业道德是社会主义()的重要组成部分。
A、思想体系
B、社会体系
C、法制体系
D、道德体系(正确答案)
121.()是基于工业以太网协议的通讯协议。
A、ProfiNet(正确答案)
B、Ethercat(正确答案)
C、Powerlink(正确答案)
D、ProfibusD.P
122.()是直流电动机的调速方式。
A、改变电枢电压(正确答案)
B、改变电源频率
C、改变励磁电流(正确答案)
D、改变极对数
123.工业机器人点位控制式适用于()等作业。
A、上下料(正确答案)
B、点焊(正确答案)
C、卸运(正确答案)
D、喷涂
124.下列选项中,()需要数字量输出信号控制。
A、接近开关
B、光电传感器
C、指示灯(正确答案)
D、电磁阀(正确答案)
125.对于工业机器人仿真虚拟调试,以下说法正确的是()。
A、可以减少机器人产线停工时间(正确答案)
B、使编程者远离危险的编程环境(正确答案)
C、便于和CAD\CAE系统结合(正确答案)
D、验证项目的可行性(正确答案)
126.工业机器人系统一般由()组成。
A、机械本体(正确答案)
B、控制系统(正确答案)
C、示教器(正确答案)
D、快换工具(正确答案)
127.机械制图设计中,六个基本视图中最常用的是()。
A、主视图(正确答案)
B、俯视图(正确答案)
C、左视图(正确答案)
D、仰视图
128.机器人的定位精度是指机器人末端执行器的实际位置与目标位置之间的偏差,由()与系统分辨率等部分组成。
A、机械误差(正确答案)
B、控制算法(正确答案)
C、随机误差
D、系统误差
129.()为储能电子元件。
A、电阻
B、电感(正确答案)
C、三极管
D、电容(正确答案)
130.影响机器人价格的主要参数是()。
A、重复定位精度(正确答案)
B、防护等级(正确答案)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 工业 机器人 模拟 试题
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《草房子》教学设计.docx
《草房子》教学设计.docx
-
《耳鼻咽喉科学》教学目标和教学大纲.docx
-
《国际贸易》课后习题答案.docx
-
《财务报表分析》课后习题参考答案精选文档.docx
-
《斗鸡》大班教案.docx
-
《广东省省级财政性资金投资民用建筑项目管理暂行办法》粤府办4号.docx
-
《金融erp》实验报告模板格式1.docx
-
《漂亮老师与坏小子》读后感15篇.docx
-
《首尔大学韩国语》第二册.docx
-
《系统工程》复习资料.docx
-
《渔父》检测练习附参考答案.docx
-
《00152组织行为学》真题答案及解析.docx
-
《春》教学设计通用6篇.docx
-
《aftereffects》课程标准.docx
-
《大学英语三级单词》高频词.docx
-
《公共组织理论》教学大纲.docx
-
《建筑工程评估》课程设计.docx
-
《马克思主义基本原理概论》期末考试复习题.docx
-
《三字经》拼音注释完整版.docx
-
《我爸爸》小班语言教案.docx
-
《野望》《黄鹤楼》《使至塞上》知识练习题及古诗词鉴赏答题技巧.docx
-
0cf3aea5f56527d3240c844769eae009581ba2a1.docx
-
4P营销策略的运用doc.docx
-
7李商隐诗两首教学设计教案.docx
-
20XX年党支部工作报告决议工作报告doc.docx
-
28卸料平台方案工字钢悬挑要点.docx
-
110kVxx变电站扩建工程监理规划.docx
-
1999年考研英语真题阅读详解.docx
-
AP微积分BC选择题样卷一.docx
-
C++汽车租赁管理系统.docx
-
《初中语文个性化作业设计的实验和设计研究》课题开题报告.docx
-
《高速公路建设项目质量保证体系和质量保证措施》示例.docx
-
二手房合同范本(共2页)1100字.docx
-
二手房屋转让合同范本_3篇(共7页)4300字.docx
-
订立劳动合同4篇(共5页)3200字.docx
-
抵押贷款合同文本(共3页)1400字.docx
-
二手房房东租房合同(共1页)600字.docx
-
房产中介房屋租赁合同范本(共1页)600字.docx
-
二手房转让协议(共3页)1700字.docx
-
店铺转让合同(共2页)1000字.docx
-
房产中介合作协议范本(共3页)1900字.docx
-
店铺转让合同样板(共2页)900字.docx
-
房产转让合同(一)(共2页)1000字.docx
-
电影演员聘用合同范本(经纪公司版)(共9页)5800字.docx
-
房产销售合同模板(共8页)4900字.docx
-
房产租赁合同_1篇(共7页)4600字.docx
-
房地产买卖合同范本4篇(共11页)7300字.docx
-
对外加工贸易-中外合作经营合同范本(1)(共18页)12100字.docx
-
房地产委托合同_2篇(共4页)2000字.docx
-
房地产项目居间合同(共3页)1500字.docx
-
动产家具无偿寄托契约书(共2页)800字.docx
