 倒立摆建模.docx
倒立摆建模.docx
- 文档编号:14443483
- 上传时间:2023-06-23
- 格式:DOCX
- 页数:14
- 大小:469.27KB
倒立摆建模.docx
《倒立摆建模.docx》由会员分享,可在线阅读,更多相关《倒立摆建模.docx(14页珍藏版)》请在冰点文库上搜索。
倒立摆建模
1.一阶倒立摆建模
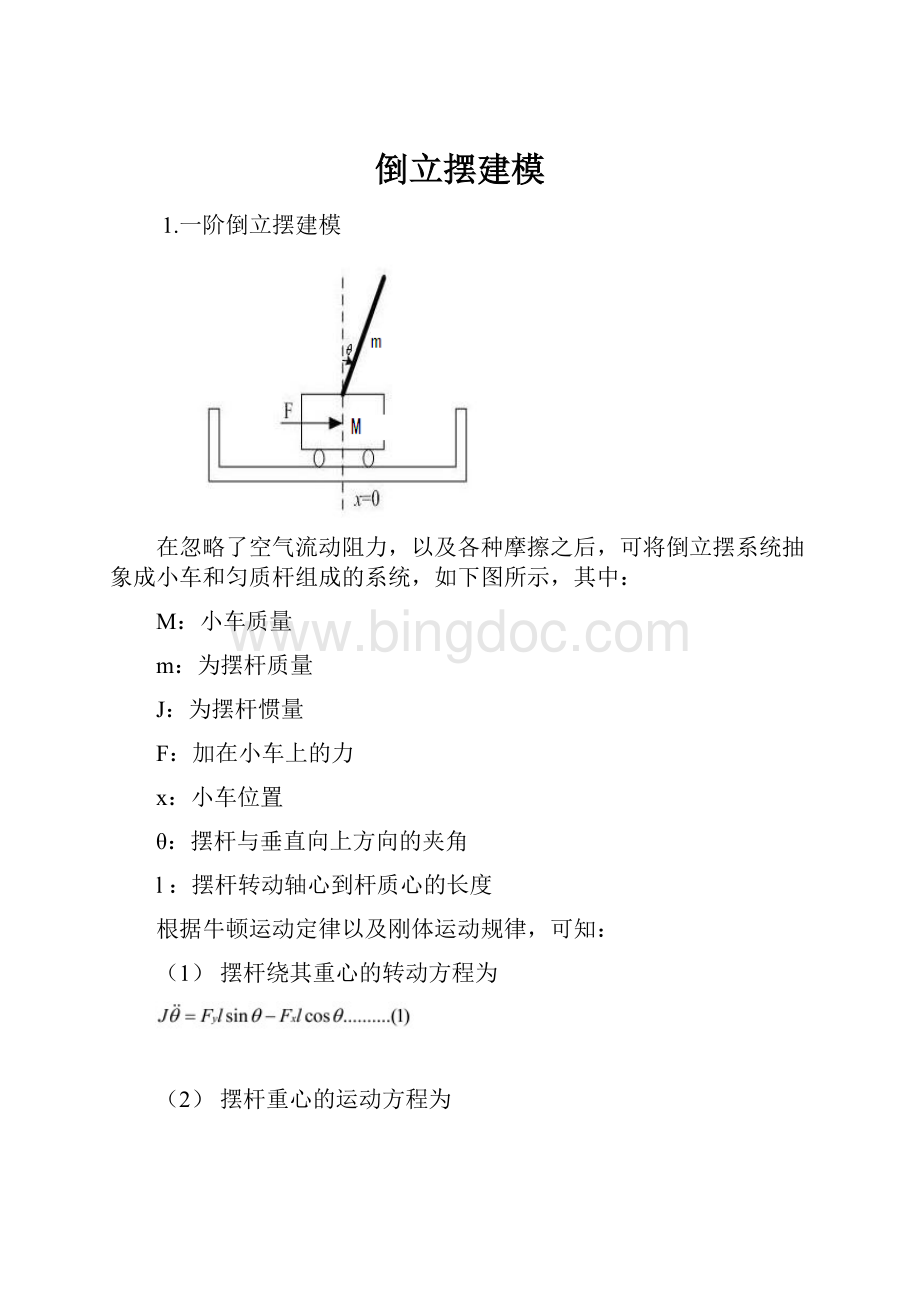
在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中:
M:
小车质量
m:
为摆杆质量
J:
为摆杆惯量
F:
加在小车上的力
x:
小车位置
θ:
摆杆与垂直向上方向的夹角
l:
摆杆转动轴心到杆质心的长度
根据牛顿运动定律以及刚体运动规律,可知:
(1)摆杆绕其重心的转动方程为
(2)摆杆重心的运动方程为
得
(3)小车水平方向上的运动为
联列上述4个方程,可以得出
一阶倒立精确气模型:
式中J为摆杆的转动惯量:
若只考虑θ在其工作点附近θ0=0附近(
)的细微变化,则可以近似认为:
2.2模型建立及封装
1、建立以下模型:
图2模型验证原理图
2、由状态方程可求得:
Fcn:
(4/3*u[1]+4/3*m*l*sin(u[3])*power(u[2],2)-10*m*sin(u[3])*cos(u[3]))/(4/3*(1+m)-m*power(cos(u[3]),2))
Fcn1:
(cos(u[3])*u[1]+m*l*sin(u[3])*cos(u[3])*power(u[2],2)-10*(1+m)*sin(u[3]))/(m*l*power(cos(u[3]),2)-4/3*l*(1+m))
Fun2:
(4*u[1]-30*m*u[3])/(4+m)
Fun3:
(u[1]-10*(1+m)*u[3])/(m*l-4/3*l*(1+m))
(其中J=mL^2/3,小车质量M=1kg,倒摆振子质量m=1Kg,倒摆长度l=1m,重力加速度g=10m/s^2)
将以上表达式导入函数。
3、匡选要封装区后选择[Edit>>CreateSubsystem]便得以下系统:
图3子系统建立
4、鼠标右击子系统模块,在模块窗口选项中选择[Edit>>EditMask>>Parameters],则弹出如下窗口,添加参数m和l。
图4添加参数
5、将精确模型subsystem和简化模型subsystem1组合成以下系统以供验证(输入信号是由阶跃信号合成的脉冲,幅值及持续时间为0.1s)。
图5系统模块封装
3仿真验证
3.1实验设计
假定使倒立摆在(θ=0,x=0)初始状态下突加微小冲击力作用,则依据经验知,小车将向前移动,摆杆将倒下。
3.2编制绘图子程序
1、新建M文件输入以下程序并保存。
clc
loadxy.mat
t=signals(1,:
);%读取时间信号
f=signals(2,:
);%读取作用力F信号
x=signals(3,:
);%读取精确模型中的小车位置信号
q=signals(4,:
);%读取精确模型中倒摆摆角信号
xx=signals(5,:
);%读取简化模型中的小车位置信号
qq=signals(6,:
);%读取简化模型中倒立摆摆角信号
figure
(1)%定义第一个图形
hf=line(t,f(:
));%连接时间-作用力曲线
gridon;
xlabel('Time(s)')%定义横坐标
ylabel('Force(N)')%定义纵坐标
axis([0100.12])%定义坐标范围
axet=axes('Position',get(gca,'Position'),...
'XAxisLocation','bottom',...
'YAxisLocation','right','color','none',...
'XColor','k','YColor','k');%定义曲线属性
ht=line(t,x,'color','r','parent',axet);%连接时间-小车位置曲线
ht=line(t,xx,'color','r','parent',axet);%连接时间-小车速度曲线
ylabel('Evolutionofthexposition(m)')%定义坐标名称
axis([0100.1])%定义坐标范围
title('Responsexandx''inmetertoaf(t)pulseof0.1N')%定义曲线标题名称
gtext('\leftarrowf(t)'),gtext('x(t)\rightarrow'),gtext('\leftarrowx''(t)')
figure
(2)
hf=line(t,f(:
));
gridon
xlabel('Time')
ylabel('Force(N)')
axis([0100.12])
axet=axes('Position',get(gca,'Position'),...
'XAxisLocation','bottom',...
'YAxisLocation','right','color','none',...
'XColor','k','YColor','k');
ht=line(t,q,'color','r','parent',axet);
ht=line(t,qq,'color','r','parent',axet);
ylabel('Angleevolution(rad)')
axis([01-0.30])
title('Response\theta(t)and\theta''inradtoaf(t)pulseof0.1N')
gtext('\leftarrowf(t)'),gtext('\theta(t)\rightarrow'),gtext('\leftarrow\theta''(t)'3.3仿真验证
2、在系统模型中,双击子系统模块,则会弹出一个新窗口,在新窗口中输入m和l值,点击OK并运行,如图7所示。
图6参数输入
3、运行M文件程序,执行该程序的结果如图8所示。
图7模型验证仿真结果
从中可见,在0.1N的冲击力下,摆杆倒下(θ由零逐步增大),小车位置逐渐增加,这一结果符合前述的实验设计,故可以在一定程度上确认该“一阶倒立摆系统”的数学模型是有效的。
同时,由图中也可以看出,近似模型在0.8s以前与精确模型非常接近,因此,也可以认为近似模型在一定条件下可以表达原系统模型的性质。
4双闭环PID控制器设计
一级倒立摆系统位置伺服控制系统如图10所示。
图10一级倒立摆系统位置伺服控制系统方框图
4.1内环控制器的设计
内环采用反馈校正进行控制。
图11内环系统结构图
控制器参数的整定:
令:
内环控制器的传递函数为:
内环控制系统的闭环传递函数为:
4.2外环控制器的设计
外环系统前向通道的传递函数为:
图12外环系统结构图
外环控制器采用PD形式,其传递函数为:
图13系统仿真结构图
5仿真实验
1、根据已设计好的PID控制器,可建立图14系统,设置仿真时间为20ms,单击运行。
(其中的对象模型为精确模型的封装子系统形式)
图14SIMULINK仿真框图
2、新建M文件,输入以下命令并运行。
%将导入到PID.mat中的仿真试验数据读出
loadPID.mat
t=signals(1,:
);
q=signals(2,:
);
x=signals(3,:
);
%drawingx(t)andthera(t)responsesignals
%画小车位置和摆杆角度的响应曲线
figure
(1)
hf=line(t,q(:
));
gridon
xlabel('Time(s)')
axis([010-0.31.2])
ht=line(t,x,'color','r');
axis([010-0.31.2])
title('\theta(t)andx(t)Responsetoastepinput')
gtext('\leftarrowx(t)'),gtext('\theta(t)\uparrow')
执行该程序的结果如图9所示,从中可见,双闭环PID控制方案是有效的。
图15系统仿真结果图


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 倒立 建模
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《草房子》教学设计.docx
《草房子》教学设计.docx
-
《耳鼻咽喉科学》教学目标和教学大纲.docx
-
《国际贸易》课后习题答案.docx
-
《财务报表分析》课后习题参考答案精选文档.docx
-
《斗鸡》大班教案.docx
-
《广东省省级财政性资金投资民用建筑项目管理暂行办法》粤府办4号.docx
-
《金融erp》实验报告模板格式1.docx
-
《漂亮老师与坏小子》读后感15篇.docx
-
《首尔大学韩国语》第二册.docx
-
《系统工程》复习资料.docx
-
《渔父》检测练习附参考答案.docx
-
《00152组织行为学》真题答案及解析.docx
-
《春》教学设计通用6篇.docx
-
《aftereffects》课程标准.docx
-
《大学英语三级单词》高频词.docx
-
《公共组织理论》教学大纲.docx
-
《建筑工程评估》课程设计.docx
-
《马克思主义基本原理概论》期末考试复习题.docx
-
《三字经》拼音注释完整版.docx
-
《我爸爸》小班语言教案.docx
-
《野望》《黄鹤楼》《使至塞上》知识练习题及古诗词鉴赏答题技巧.docx
-
0cf3aea5f56527d3240c844769eae009581ba2a1.docx
-
4P营销策略的运用doc.docx
-
7李商隐诗两首教学设计教案.docx
-
20XX年党支部工作报告决议工作报告doc.docx
-
28卸料平台方案工字钢悬挑要点.docx
-
110kVxx变电站扩建工程监理规划.docx
-
1999年考研英语真题阅读详解.docx
-
AP微积分BC选择题样卷一.docx
-
C++汽车租赁管理系统.docx
-
《初中语文个性化作业设计的实验和设计研究》课题开题报告.docx
-
《高速公路建设项目质量保证体系和质量保证措施》示例.docx
-
物质的量.docx
-
习俗作文之习俗抓周作文500.docx
-
核心素养在初中英语阅读教学中的实践研究文献综述Word文件下载.docx
-
夏季防中暑的方法.docx
-
化工见习报告Word文档格式.docx
-
黑格尔法哲学批判导言读书报告文档格式.docx
-
建筑工地扬尘污染防治专项方案Word文档下载推荐.docx
-
黑米色素的提取与纯化【开题报告+文献综述+毕业论文】Word文档格式.docx
-
机动车清洗维修行业整治方案与机动车节能排气防治实施方案汇编.docx
-
建筑消防教学大纲教学提纲Word下载.docx
-
红色故事演讲稿10篇Word文档格式.doc
-
江苏省公费医疗管理实施细则Word下载.docx
-
红十字会先进个人事迹Word下载.docx
-
环卫保洁监督激励机制和管理措施方案Word文档格式.docx
-
交互式电子白板课题Word格式文档下载.docx
-
宏观经济学曼昆第版配套习题Word格式.doc
-
后备人才储备方案Word文档下载推荐.doc
-
呼叫中心座席外包项目合同协议书范本Word文件下载.docx
-
湖北科技学院药理学主观题重点Word文件下载.doc
