 控制系统硬件模块化设计研究与实现样本.docx
控制系统硬件模块化设计研究与实现样本.docx
- 文档编号:13756450
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:16
- 大小:1,005.13KB
控制系统硬件模块化设计研究与实现样本.docx
《控制系统硬件模块化设计研究与实现样本.docx》由会员分享,可在线阅读,更多相关《控制系统硬件模块化设计研究与实现样本.docx(16页珍藏版)》请在冰点文库上搜索。
控制系统硬件模块化设计研究与实现样本
第四章控制系统硬件模块化设计研究与实现
4.1微解决器选取
由于机械手控制系统中没有大量信号需要解决,同步又要满足控制规定,决定采用美国SiliconLabs公司C8051F型单片机,详细型号为C8051F020。
从嵌入式计算机系统角度来看,单片机技术发展经历了SCM(SingleChipMicrocomputer,单片微型计算机),MCU(MicrocontrollerUnit,微控制器)以及SoC(SystemonChip,片上系统)三个阶段。
该单片机C8051F020为高度集成混合信号SoC系统级芯片,具备与8051单片机兼容高速、流水线CIP-51微解决器内核,与MCS-51指令集完全兼容。
64K字节可在线编程FLASH存储器,可寻址64K字节地址空间外部数据存储器接口等资源。
除了具备原则8051数字外设部件外,片内还集成了数据采集和控制系统中惯用模仿部件及其她某些数字外设部件[15]。
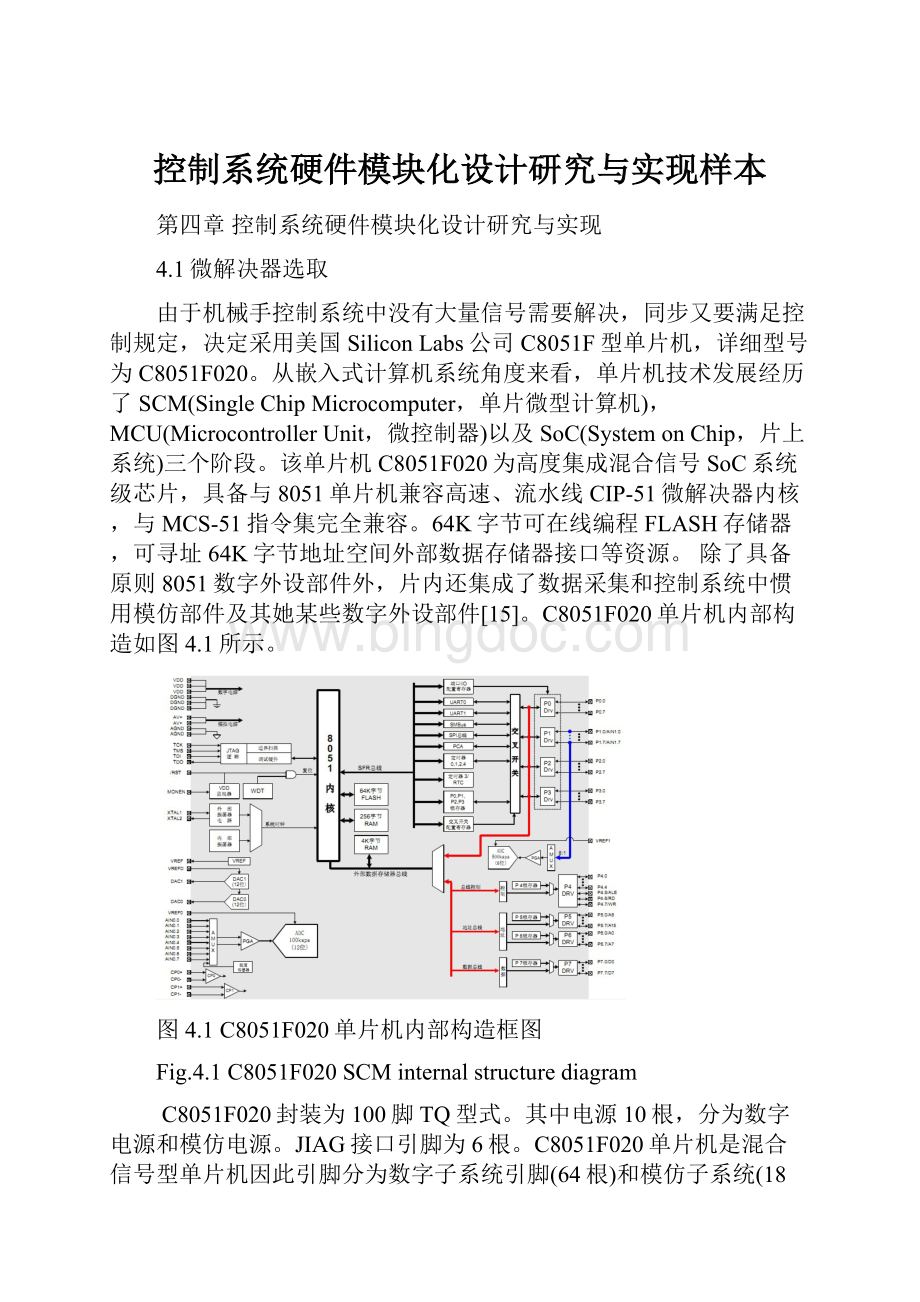
C8051F020单片机内部构造如图4.1所示。
图4.1C8051F020单片机内部构造框图
Fig.4.1C8051F020SCMinternalstructurediagram
C8051F020封装为100脚TQ型式。
其中电源10根,分为数字电源和模仿电源。
JIAG接口引脚为6根。
C8051F020单片机是混合信号型单片机因此引脚分为数字子系统引脚(64根)和模仿子系统(18根)。
I/O端口有复用方式和非复用方式两种方式。
C8051F020单片机引脚如图4.2所示。
图4.2C8051F020引脚构造图
Fig.4.2TheC8051F020pinstructurepicture
在C8051F系列单片机中采用交叉开关网络以硬件方式实现I/O端口灵活配备。
在这种通过交叉开关配备I/O端口系统中,单片机外部为通用I/O口,内有输入/输出电路单元通过相应配备寄存器控制交叉开关配备到所选取端口上。
对C8051F020引脚功能熟悉是设计外围硬件电路和绘制电路原理图基本。
只有深刻理解这100个引脚每个引脚功能,复用方式,才干合理分派使用每个引脚,在与外围硬件电路设计中达到C8051F020效能最大化。
4.2模块化控制系统硬件总体设计办法
4.2.1单片机外围硬件电路设计基本原则
C8051F020SoC型单片机具备集成度高,功能强大特点。
过去设计单片机系统往往采用是搭积木式扩展方式。
依照需要将外设(如A/D,D/A,RAM等)进行片外扩展,体积规模较大,与之相配合供电,时钟信号,抗干扰一系列问题也要考虑,系统复杂限度越大故障点就越多。
而片上系统具备高度集成性,咱们要做只是依照自己设计规定进行设立。
因而,应用SoC系统可靠性会提高不少[16]。
尽管如此,SoC设计与应用依然有某些共性问题和设计原则需要解决,解决妥当才可以把它特点和性能较好发挥出来。
(1)尽量选取典型电路,并符合51单片机常规设计规范。
典型电路为硬件系统原则化,模块化打下良好基本,典型电路易查找资料,改正问题[17]。
(2)系统设计应充分满足控制系统功能规定,并一定要有预留模块,以便扩展系统功能。
(3)硬件设计出实物最后是PCB板,因此系统设计时要规划好PCB设计。
SoC工作频率较高,对电源规定也较高,因而所设计电路板至少是2层。
除从PCB考虑外,还要从供电电源考虑,无论单片机片内与否有稳压器,最佳都要接稳压器再连接单片机,并在电源入口处加容量为4.7uF与0.1uF电容。
(4)要充分运用C8051F020可编程I/O口分派功能,若在设计PCB时发现问题可再调节电路原理图,做到I/O口最佳分派方案。
(5)C8051F020电压较低,连接其她系统或本系统高压外设时要通过光耦隔离。
这种做法可以有效切断干扰,保证电路不被烧坏。
4.2.2模块化硬件系统总体架构与设计
硬件设计上以功能特性作为划分模块根据,分为基本功能模块、预留功能模块和辅助功能模块。
选取触摸屏作为软硬件交互平台。
硬件上C8051F020单片机作为主控芯片,基本功能模块某些分为串口电路模块、JTAG接口模块、步进电机驱动两关节模块,输出端子口J1模块。
预留功能模块某些设计了12位电路转换模块、输入端子口模块、输出端子口模块、驱动三关节模块等。
其中12位模数转换电路模块设计是考虑到采集到视频信号输入与转换。
输入端子口模块电路预留是以便用开关按键对机械手控制。
输出端子口设计是考虑到若手动按键时LCD可以显示机械手运动过程中有关参数等。
步进电机驱动三关节这是模块化机械本体已设定规定。
辅助功能模块某些有电源电路模块和晶振复位电路模块。
详细见图4.3。
图4.3硬件模块化总体设计框图
Fig.4.3Thehardwaremodularoveralldesigndiagram
4.3基于触摸屏人机交互平台功能架构
本控制系统中触摸屏作为整个控制系统人机交互核心,同步也是软硬件交互核心。
通过触摸屏发送命令给单片机调用单片机内部功能模块,完毕相应动作,达到控制规定。
因此触摸屏是整个控制系统核心。
触摸屏购买并使用北京迪文科技有限公司以工业应用为主T系列8寸800*600(辨别率)触摸屏,详细型号为DMG80600T080_01W。
触摸屏两根串口线与单片机相连,一根电源线。
触摸屏功能架构拟定是依照模块化机械手本体来设定,通过设计触摸屏界面和命令按钮来达到。
界面设计涉及参数设定,关节模式选取,工作方式选取等界面。
其中关节模式有两关节模式和三关节模式,参数设定是大小臂长度设定,装配点,抓取点位置设定,工作方式有手动和自动等。
在设计触摸屏同步是与硬件模块化互相参照,协同设计,从而达到触摸屏界面和命令按钮与硬件模块互相吻合,实现预想控制功能。
4.4基本功能模块设计
4.4.1串口模块设计
C8051F020单片机中有2个增强型串行口:
UART0和UART1。
所谓“增强型”是指,这2个串行口都具备帧错误检测和通信地址硬件辨认功能。
串口通信方式使用数据线少,在远距离通信中可以节约通信成本。
本控制系统中迪文触摸屏采用是串口通信,因此单片机串口UART0作为与触摸屏通信接口,UART1作为预留模块串口接口为后来也许数据传播预留。
UART0串口通信采用MAX232电平转换芯片。
它是专门为RS-232原则串口设计单电源电平转换芯片,使用+5V单电源供电,集成度高,在设计电路时片外最低只需4个1uF电容即可工作[18]。
设计原理图如图4.4所示。
图4.4串口电路图
Fig.4.4Theserialinterfacecircuitdiagram
4.4.2JTAG接口模块设计
JTAG(JointTestActionGroup,联合测试行动小组),是一种国际原则测试合同,它与IEEE1149.1兼容,重要用于芯片内部测试,可以以单片或其他方式调试程序。
当前越来越多器件支持JTAG合同,如DSP,FPGA等。
支持JTAG合同80C51兼容类单片机并不多,当前市场上重要就是C8051F系列。
JTAG编程方式是在线编程,简化流程为先固定器件到电路板上,再用JTAG编程,从而可以大大加快工程进度。
原则JTAG接口是4根信号线:
TMS,TCK,TDI,TDO,分别为模式选取,时钟,数据输入和数据输出线。
可选引脚TRST用于测试复位,为输入引脚,低电平有效。
C8051F020自身就带有JTAG接口,其端口引脚1到引脚4与JTAG连接端子相连。
JTAG适配器通过USB接口与上位机相连,同步通过10芯JTAG连接端子与目的电路板相连。
JTAG连接完毕后,可以通过上位机来控制程序运营,停止,单步和过程单步执行,可以设立硬件断点,可以查看和修改存储器和寄存器。
在调试完毕后,可以将代码下载到Flash程序存储器中,从而完毕一种完整开发过程[19]。
如图4.5所示。
图4.5JTAG与单片机连线图
Fig.4.5ThewiringdiagramofJTAGtothesinglechipmicrocomputer
4.4.3步进电机驱动模块设计
装配机械手为平面关节型,大、小臂均为回转运动,重量较轻,转动惯量不大,普通电机都能带动。
步进电机系统多用于开环控制,构造简朴,位置和速度易于控制,其相应速度快,输出力矩较大,能迅速启动,反制和制动。
特别是步进电机没有积累误差,普通精度为实际步距角百分之三到五,且不累积,驱动机械手运动时有较高位置精度,对于本系统控制较为抱负,其他交流伺服电机等性价比不高。
通过度析比较当前省内步进电机生产厂家产品,现选取常州市泽明自动化设备有限公司两相混合式步进电机39BYG系列:
表2.1两相混合式步进电机39BYG系列技术参数
Tab.2.1Theseriestechnicalparametersof39BYGtwophasehybridsteppingmotor
型号
歩距角
机身长
电流
电阻
静力距
定位距
转动惯量
引线
重量
39BYGB6410
1.8°
26mm
0.6A
9欧姆
1.4Kg.cm
0.8N.cm
14g.cm^2
4根
120g
图4.6两相混合式步进电机39BYG系列尺寸
Fig.4.6Theseriessizeoftwophasehybridsteppingmotorof39BYG
步进电机驱动电路设计中购买了96560AV3型CNC步进电机驱动器。
如图4.7所示。
图4.7步进电机驱动器
Fig.4.7Thesteppingmotordrive
它采用TB6560AHQ型驱动芯片。
此芯片是东芝公司最新设计生产单片正弦细分二相步进电机驱动专用芯片,与初期推出TB6560HQ芯片相比,其性能有较大提高,输出电流最高可达3.5A。
而采用该芯片驱动板在电路上,构造上都使用了可靠性设计,在普通散热方式状况下可稳定地工作在3A电流。
可以驱动3A如下二,四相步进电机。
(1)在构造上TB6560AHQ芯片采用卧式安装,增强了散热效果和构造强度,所有接线,操作部位移至一侧,以便操作。
(2)接口状况见图4.8。
图中四幅图分别代表了整体接口状况,电源输入及步进电机接口,控制信号输入接口(最后一幅图中,其中白色插头与绿色接线端口功能相似)。
图4.8步进电机接口图
Fig.4.8Thesteppingmotorinterfacediagram
驱动器电源接入12~34直流电源,注意正负极。
电源可用交流变压器加整流滤波得到,整流前交流电压不能高于25V,滤波电容用3300uF比较适当。
合用电机为两相,四相混合式(4线,6线或8线步进电机)[20]。
(3)C8051F020单片机P0.2口到P0.4口通过74HC245驱动芯片接到步进电机控制信号输入端,欲作为步进电机脉冲信号输入端。
74HC245芯片为总线驱动器芯片。
它是典型CMOS型三态缓冲门电路。
由于单片机或CPU数据/地址/控制总线端口均有一定负载能力,如果负载超过其负载能力,普通应加驱动器,作用就是信号功率放大[21]。
同理4个步进电机片选,方向由单片机P7.0口到P7.7口通过74HC245芯片来控制。
详细如图4.9所示。
(4)设计步进电机共4个,其中3个是用来满足两关节模块时大小臂和立柱驱动,预留1个步进电机是考虑三关节模块驱动。
这样硬件设计符合模块化设计思想。
图4.9单片机控制步进电机接线图
Fig.4.9Thediagramofsingle-chipmicrocomputertosteppingmotorconnecting
4.4.4输出端子口J1设计
装配机械手是由步进电机驱动大小臂旋转,立柱升降,因此必要输出4个步进电机有关控制信号,每个步进电机需要有片选信号CS,方向信号DIR,脉冲信号CP共3种信号。
为了控制其他强电启动和闭合又设计了4个继电器输出(其中1个作为末端夹持器电磁铁吸合控制,其他3个作为预留),共16个输出端子口作为输出端子口J1。
如图4.10所示。
图4.10输出端子口J1接线图
Fig.4.10TheoutputterminalsJ1
夹持器安装在手臂机械接口上,相称于人手部功能,是装配机器手重要部件,作为末端执行器。
该夹持器传动原理:
该夹持器通过支座固定在机械手小臂首端,继电器驱动系统推动推杆伸缩运动,连杆将运动传给夹持器手指,将伸缩运动转化为指端张开和合拢,从而抓紧和放下轴承套。
继电器驱动电路图如图图4.11所示。
图4.11夹持器驱动电路图
Fig.4.11Thegrippersdrivecircuitdiagram
4.5预留功能电路模块设计
预留功能模块是在基本功能模块基本上为适应模块化装配机械手惯用预留功能而设计,是满足各种工况下可以拼装模块化主控系统规定而预先设计预留模块,这种设计变化了老式“一种工况规定,一次重新设计”设计办法,大大提高控制系统灵活性、适应性。
4.5.112位模/数转换器模块设计
考虑到若将采集到模仿信号转换成数字信号,设计了一种8通道端口与C8051F020模/数转换器相连。
即与单片机18引脚到25引脚相连。
每个通道都可以传播一种模仿信号。
C8051F020内置两个模/数转换器,一种为12位模/数转换器ADC0,另一种为8位模/数转换器ADC1。
其中ADC0采用逐位比较方式将输入模仿信号进行转换,从而获得精度为12位数字量。
转换成果保存在ADC0数据字寄存器ADC0H,ADC0L中。
ADC0模块详细由一种9通道可编程模仿多路选取器AMUX0(其中第9通道在内部被接到片内温度传感器),一种可编程增益放大器PGA0和可编程越限检测器构成[14]。
如图4.12为ADC0输入与单片机相连图。
图4.12ADC0输入与单片机相连图
Fig.4.12ThediagramofADC0inputstosingle-chipmicrocomputer
4.5.2输入端子口J2设计
为考虑到装配机械手关于控制信号输入,设计了16个输入端子,采用ORIENT817C光电隔离芯片连接到单片机P4.0口到P4.7口,P5.0口到P5.7口,共16个引脚上。
这些预留输入端子口可作为按钮开关等信号输入。
817是惯用线性光耦,在各种规定比较精密功能电路中经常被当作耦合器件,具备上下级电路完全隔离作用,互相不产生影响。
线性光耦原理是当输入端加电信号时,发光器发出光线,照射在受光体上,受光器接受光线后导通,产生光电流从输出端输出,从而实现了“电-光-电”转换。
线性光电耦合器是一种新型光电隔离器件,可以传播持续变化模仿电压或电流信号,这样随着输入信号强弱变化会产生相应光信号,从而使光敏晶体管导通程序也不同,输出电压或电流也随之不同[22]。
输出端子口J3是预留作为液晶显示屏控制预留地端子口。
4.6辅助功能模块设计
辅助功能模块是为控制系统硬件电路正常工作而设计。
它重要涉及电源电路模块和晶振、复位电路模块,提供硬件电路必要各种电压,单片机工作所需晶振频率,系统复位等。
4.6.1电源电路模块设计
(1)控制系统电源单元是一种模数混合电路,并且数字电路需要各种电压,其中MCU芯片C8051F020需要3.3V供电,而其她芯片,器件需要+5V,+12V等电平供电。
因而整个电路规定至少需要3种以上供电电源。
(2)设计电源220V交流电通过变压器变成15V交流电通过二极管桥式整流电路后变成直流电输入给芯片LM7812。
三端稳压集成电路LM7812只有三个引脚输出,分别是输入端,输出端和接地端,芯片LM7812输出稳压为12V。
输出12V电压给芯片PWB2405后输出5V。
芯片AS1117输入5V,输出3.3V。
按照原则电路,芯片旁又有相应滤波电容。
芯片LM7812,PWB2405,AS1117基本上都是稳压芯片。
如图4.13所示。
图4.13电源电路图
Fig.4.13Thepowersupplycircuitdiagram
4.6.2晶振和复位电路设计
晶振电路和复位电路都是按照C8051F020原则电路规定设计[14]。
4.7总电路原理图和元器件布置图
(1)装配机械手控制系统电路原理图如下图4.14所示。
图4.14装配机械手控制系统基本电路原理图
Fig.4.14Thebasiccircuitprinciplediagramofassemblingmanipulatorcontrolsystem
(2)为了将设计好原理图绘制成PCB,设想元器件布置图如下图4.15所示。
图4.15元器件布置图
Fig.4.15Thediagramofcomponentsarrangements
4.8PCB板绘制和制作
电路原理图设计最后目就是要制成一块相应PCB板。
当基本电路原理图完毕后,就要进行PCB板设计。
本次PCB设计中采用双面板。
涉及顶层(TopLayer)和底层(BottomLayer)电路板。
顶层普通为元件面,底层普通为焊接面。
相对于多层板而言,双面板制作成本不高,对于普通应用电路双面板普通都能满足规定[23]。
详细设计流程如下图4.16所示。
图4.16PCB设计流程图
Fig.4.16TheflowchartofPCBdesign
制作完毕PCB有关文献如下图4.17到图4.19所示。
图4.17用AltiumDesigner09绘制PCB2D图
Fig.4.17ThefigureofPCB2DwithAltiumDesigner09
图4.18AltiumDesigner09生成PCB3D图
Fig.4.18ThefigureofPCB3DwithAltiumDesigner09
图4.19设计PCB后产生某些Gerber文献
Fig.4.19ThepartofthedocumentGerbersafterPCBdesign
通过工厂加工,制作出PCB板后就焊接元器件。
如图4.20为焊接好所有元器件实物图。
图4.20最后制成PCB板
Fig.4.20ThefinalmadeofPCB
4.9本章小结
本章重要简介装配机械手控制系统硬件模块化设计与研究。
依照硬件控制规定一方面选取了嵌入式系统主控制芯片,对模块化硬件系统总体进行设计提成基本功能模块、预留功能模块、辅助功能模块三大某些,并搭建出详细模块化设计框图。
同步依照模块化机械手本体并与硬件设计相结合设计了触摸屏功能架构。
然后分别设计出每个模块详细电路原理图,绘制出总原理图和元器件布置图。
最后绘制PCB板,制作硬件实物,完毕硬件模块化设计。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 硬件 模块化 设计 研究 实现 样本
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《草房子》教学设计.docx
《草房子》教学设计.docx
-
《耳鼻咽喉科学》教学目标和教学大纲.docx
-
《国际贸易》课后习题答案.docx
-
《财务报表分析》课后习题参考答案精选文档.docx
-
《斗鸡》大班教案.docx
-
《广东省省级财政性资金投资民用建筑项目管理暂行办法》粤府办4号.docx
-
《金融erp》实验报告模板格式1.docx
-
《漂亮老师与坏小子》读后感15篇.docx
-
《首尔大学韩国语》第二册.docx
-
《系统工程》复习资料.docx
-
《渔父》检测练习附参考答案.docx
-
《00152组织行为学》真题答案及解析.docx
-
《春》教学设计通用6篇.docx
-
《aftereffects》课程标准.docx
-
《大学英语三级单词》高频词.docx
-
《公共组织理论》教学大纲.docx
-
《建筑工程评估》课程设计.docx
-
《马克思主义基本原理概论》期末考试复习题.docx
-
《三字经》拼音注释完整版.docx
-
《我爸爸》小班语言教案.docx
-
《野望》《黄鹤楼》《使至塞上》知识练习题及古诗词鉴赏答题技巧.docx
-
0cf3aea5f56527d3240c844769eae009581ba2a1.docx
-
4P营销策略的运用doc.docx
-
7李商隐诗两首教学设计教案.docx
-
20XX年党支部工作报告决议工作报告doc.docx
-
28卸料平台方案工字钢悬挑要点.docx
-
110kVxx变电站扩建工程监理规划.docx
-
1999年考研英语真题阅读详解.docx
-
AP微积分BC选择题样卷一.docx
-
C++汽车租赁管理系统.docx
-
《初中语文个性化作业设计的实验和设计研究》课题开题报告.docx
-
《高速公路建设项目质量保证体系和质量保证措施》示例.docx
-
二年级语文课外阅读计划及教案docWord格式.docx
-
范文中小学幼儿园研训工作计划Word格式.docx
-
飞力达限制性股权激励Word文件下载.docx
-
服装厂实习报告怎么写及范文文档格式.docx
-
福建省普通高中学生学业基础会考地理试题Word文档格式.docx
-
转租合同标准版Word文档格式.docx
-
届黑龙江省普通高等学校招生全国统一考试仿真模拟五语文试题Word文件下载.docx
-
党课讲稿:信仰的力量——-一只小船和一个大党文档格式.doc
-
中共保密工作发展历史文档格式.doc
-
某市市场监督管理局防范化解重大风险工作总结精选可编辑Word文件下载.doc
-
公司公车使用管理制度Word文档格式.docx
-
小学语文基础知识汇总复习Word下载.docx
-
发育生物学原理考试大纲Word格式.doc
-
修改德江县民族中学教师工作量化绩效考评细则Word下载.docx
-
业务员商务礼仪培训推荐word版 17页Word格式.docx
-
浙江省杭州市江干区八年级上期末数学试题含答案Word下载.docx
-
建筑工程技术毕业论文[1]Word格式.doc
-
西方经济学考试题库含答案Word下载.docx
-
设计现场技术服务方案及保障措施Word文档下载推荐.docx
