 内蒙古科技大学自动控制原理11考题及答案doc.docx
内蒙古科技大学自动控制原理11考题及答案doc.docx
- 文档编号:13408583
- 上传时间:2023-06-13
- 格式:DOCX
- 页数:12
- 大小:135.70KB
内蒙古科技大学自动控制原理11考题及答案doc.docx
《内蒙古科技大学自动控制原理11考题及答案doc.docx》由会员分享,可在线阅读,更多相关《内蒙古科技大学自动控制原理11考题及答案doc.docx(12页珍藏版)》请在冰点文库上搜索。
内蒙古科技大学自动控制原理11考题及答案doc
内蒙古科技大学2010/2011学年第一学期《自动控制原理》(B卷)考试试题
课程号:
67106308考试方式:
闭卷
使用专业、年级:
自动化08、电气08、测控08任课教师:
李爱莲、李少波、刘丕亮
考试时间:
备注:
带计算器
一、选择题(共10题,每空3分,共30分)
1.下列属于线性定常时不变系统的数学模型是()
a)c(Z)=Z^-p^+r2(Z)
dr
b)c(Z)=^-^+r2(f)+5
dr
c)^^+3^^+6^^+8c(O=r(/)
dt3dt2dt
d)以上都不是
2.某系统的输入信号为单位斜坡信号,其输出响应为f-1+f,则该系统是(
a)惯性环节b)一阶微分c)振荡环节d)以上都错
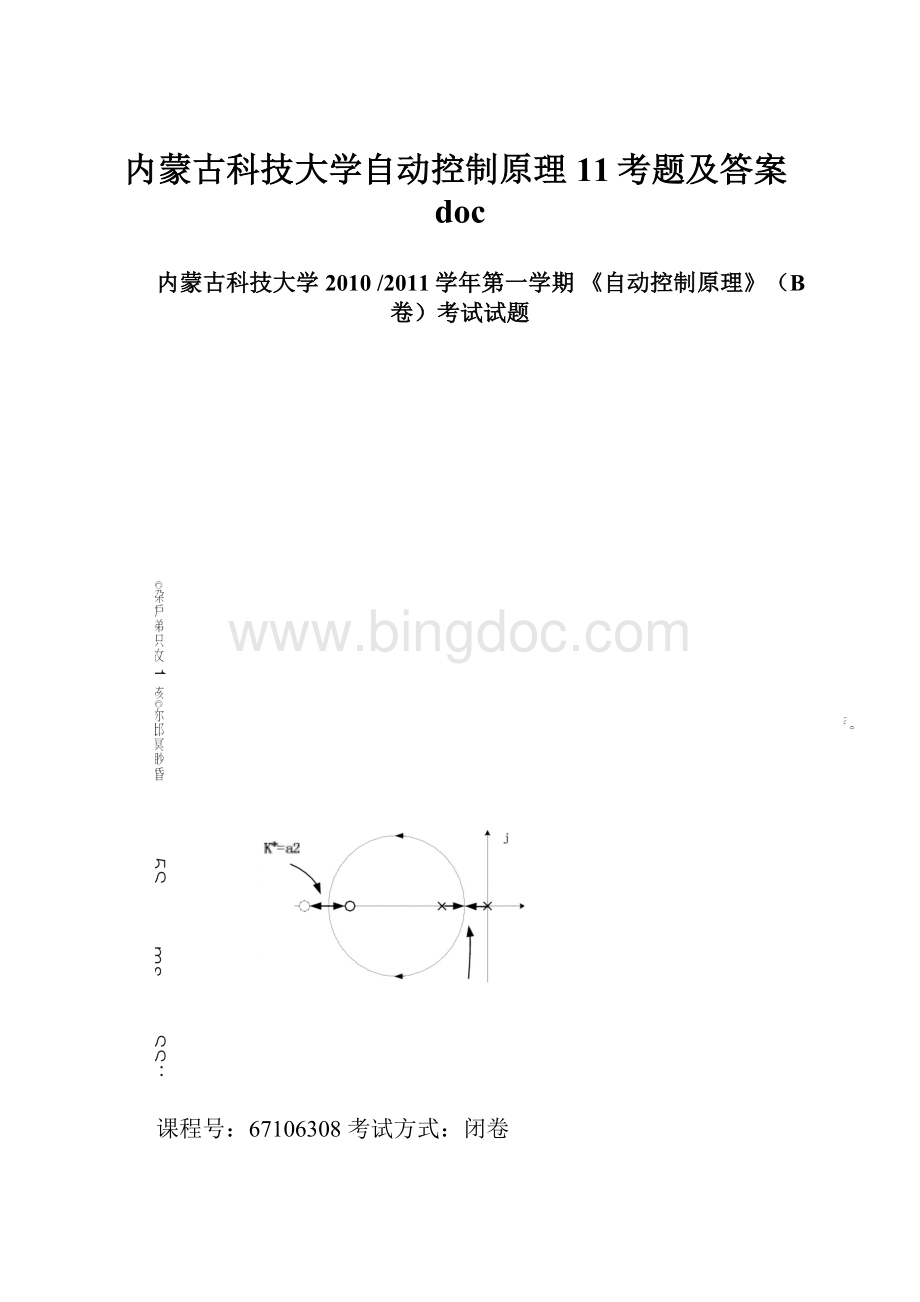
3.对图1根轨迹所表示的系统性质描述不正确的是:
()。
阁1
a)增大根轨迹增益不会使系统变得不稳定。
b)当根轨迹增益从al向a2增大时,系统调节时间变短。
c)当根轨迹增益从al向a2增人吋,系统超调量增人。
d)当根轨迹增益小于al或大于a2时,系统无超调。
4.
^(5)=
)o
系统的开环传递函数及其开环幅相特性曲线如下,则系统闭环稳定的是(
K
(7;5+1)(725+1)(7;5+1)
尺(7>+1)
卜?
_r(7;5+l)(r25+l)
d)以上都不稳定
5.最小相位系统的开环对数幅频渐近特性曲线如K图,则1列说法错误的是()
a)在革位斜坡输入信号下,系统稳态误差力0。
b)该系统为稳定系统。
c)低频段反向延长线与横轴的交点值为开环增益K。
d)增大开环增益,系统的相角裕度减小。
6.最小相位系统的开环对数幅频渐近特性曲线如下图,则系统的开环传递函数为
7.
8.下列需要用系统闭环传递函数求取的是:
()
a)绘制根轨迹
b)求取幅值裕度、相角裕度
c)奈奎斯特稳定判据
d)劳斯稳定判据
8某校正装置的传递函数为则该校正装置是(
a)超前校正装置
b)滞后校正装置
c)滞后一超前校正装置
d)不确定
9.开环传递函数0。
(心=,按照二阶最佳模型校正系统,需要采用()。
(7^+1)(7^+1)
a)比例环节P
b)比例积分环节M
c)比例税分微分环节P1D
d)不确定
10.下面关于保持器说法错误的是()
a)零阶保持器程低通特性;
b)零阶保持器带有滞后性;
c)一阶保持器的精度要比零阶保持器高;
d)一阶保持器的频率特性要比零阶保持器好.
二、(共10分)
系统的结构阁如下
1、求系统闭环传递函数
2、判断系统稳定性。
三、(共15分).
控制系统如下图所示,
z、=2(A=5%)的要求;
1,、选择参数1^和1^,使满足系统动态性能指标<7%=20%、2、当输入信号为r(Z)=10z,求选定参数下的系统稳态误差。
K
C⑺
5(5+1)
(1)试求系统的脉冲传递函数外Z)=
C(z)
四、(共15分)
按下列要求绘制根轨迹(画在一张图上,并冋答相关问题),控制系统开环传递函数为
K
5(5+2)(5+3)
1、画出实轴上的根轨迹,该根轨迹有几个无穷远处的零点?
2、求根轨迹的渐近线、分离点、与虚轴的交点(要求写计算过程)。
3、绘制系统根轨迹,并指出系统稳定吋,根轨迹增益的取值范围。
4、给系统添加开环零点,系统开环传递函数变为:
G(5)//(5)=^(5+5),增大K
5(5+2)(5+3)
值是否会使系统变的不稳定?
为什么?
五、(共15分)
A:
v=8,,(叫.)240°o
1、绘制待校正系统的开环对数幅频渐进特性曲线,并求出待校正系统的相角裕度
2、若耍达到性能指标要求,是否可以试用串联超前校正装置?
请说明理由。
六、(共15分)
已知采样控制系统如下图所示,
r⑴'一^
—T=]
(2)试确定使系统稳定K的取值范围。
注:
z(i)=Z(丄)=
sz-1s^az-e
内蒙古科技大学考试标准答案及评分标准(B卷〉
课程名称:
自动控制原理考试班级:
自动化2008、测控2008、电气2008
考试吋间:
标准制订人:
李爱莲、李少波、刘丕亮
二、(本题10分)1结构图化简1)(3分)
1
(s+1)(s2+5+I)
推出传递函数为
2(s2+s+1)
s3+2s2+2s+2
(2分)
2稳定性:
(3分)列劳斯表:
S312
S222
S11S°2
由劳斯判据可知系统稳定。
三、(本题15分)解:
1、选择参数f和/C,
由图知,系统的开环传递函数为G(5)=__(3分)
5(5+/C,/Cz)*+2风)
解得:
K\=<(2分)
K,=笠
动态性能指标要求:
(4分)
3.5,
h=—=2
cjo/o=fWo/o=20%
解得(1分)
(=0.45
con=3.S9rad/s进而推出:
尺丨=15.13、尺,=0.23(1分)
2、由开环传递函数的结构知,该系统为I型系统,其静态速度误差系数久与开环增益
K相等。
(2分)
K=K=-^=—=4.35WKt
系统稳念误差么(°°)=—=2.30(2分)
K
解:
1该系统有三个无穷远的的开环零点。
(2分)
2
渐近浅-a-0_2_3
(2分)
3
(2众+1)兀
3
zkixi;,1/.1+1_i_1—n
(2分)
yjiaj)\\\•*卞一v/
clt/+2+3
解得:
d=-0.78
d=-2.55(舍去)
与虚轴交点:
=j(O
(3分)
代入系统特征方程0(5)=?
+5?
+65+/C=0
得:
6a)-a/=0
K-5a)2=0
解得A"=30,与虚轴的交点为s=±77^3(2分)
当尺<30时,系统稳定。
(2分)
4答:
不会;(1分)
因为増加开环零点后,根轨迹的渐近线变为虚轴,K值增加时,右半平面没有根轨迹,系统稳定。
(1分)
五(共15分)
解:
1)由题意:
K=Kv=S,系统开环传递函数为:
Go(5)=(2分)
°5(5+1)(0.25+1)
对数幅频渐进特性曲线:
(6分)
截止频率:
201g8-401g6?
/=0得出叫/=2.83,^^八?
(2分)
/=180°-90°-arctan(oc•-arctan0.2呀’=—10.05°(2分)
2)(3分)
答:
不可以使用超前校正装置。
因为要达到要求的性能指标,超前校正装置需要提供的相角裕度约为:
卜40°+10.05°+10°=60.05°>60°,所以不适合采用超前校正。
六(共15分)
解:
1系统的开环脉冲传递函数:
(4分)
G(z)=Z[
C^i)]
Kz(\-e~T)
(z-l)(z-e-T)
G(z)=
0.632fc
(z-l)(z-0.368)
(2分)
系统脉冲传递函数:
G(z)
1+G(z)
0.632/Cz
z2+(0.632尺-1.368)z+0.368
(3分)
2令2=~,代入系统特征方程,整理得:
(3分)0)-\
0.632尺仞2+1.2646?
+(2.736-0.632/Q=0
列劳斯表:
(2分)
or0.632K
2.736-0.632K
of1.264
ai、2.736-0.632K
根据劳斯判据得,系统稳定的条件为:
(1分)
0<尺<4.329


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 内蒙古 科技大学 自动控制 原理 11 考题 答案 doc
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《草房子》教学设计.docx
《草房子》教学设计.docx
-
《耳鼻咽喉科学》教学目标和教学大纲.docx
-
《国际贸易》课后习题答案.docx
-
《财务报表分析》课后习题参考答案精选文档.docx
-
《斗鸡》大班教案.docx
-
《广东省省级财政性资金投资民用建筑项目管理暂行办法》粤府办4号.docx
-
《金融erp》实验报告模板格式1.docx
-
《漂亮老师与坏小子》读后感15篇.docx
-
《首尔大学韩国语》第二册.docx
-
《系统工程》复习资料.docx
-
《渔父》检测练习附参考答案.docx
-
《00152组织行为学》真题答案及解析.docx
-
《春》教学设计通用6篇.docx
-
《aftereffects》课程标准.docx
-
《大学英语三级单词》高频词.docx
-
《公共组织理论》教学大纲.docx
-
《建筑工程评估》课程设计.docx
-
《马克思主义基本原理概论》期末考试复习题.docx
-
《三字经》拼音注释完整版.docx
-
《我爸爸》小班语言教案.docx
-
《野望》《黄鹤楼》《使至塞上》知识练习题及古诗词鉴赏答题技巧.docx
-
0cf3aea5f56527d3240c844769eae009581ba2a1.docx
-
4P营销策略的运用doc.docx
-
7李商隐诗两首教学设计教案.docx
-
20XX年党支部工作报告决议工作报告doc.docx
-
28卸料平台方案工字钢悬挑要点.docx
-
110kVxx变电站扩建工程监理规划.docx
-
1999年考研英语真题阅读详解.docx
-
AP微积分BC选择题样卷一.docx
-
C++汽车租赁管理系统.docx
-
《初中语文个性化作业设计的实验和设计研究》课题开题报告.docx
-
《高速公路建设项目质量保证体系和质量保证措施》示例.docx
-
上半年哈尔滨职业技术学院招聘考试《综合基础知识(教育类)》试题Word文件下载.docx
-
上半年河北省保定市徐水区事业单位《职业能力倾向测验》试题及答案文档格式.docx
-
上半年宣城市宁国市乡镇卫生院招聘试题Word下载.docx
-
上半年河南省漯河市临颍县事业单位《职业能力倾向测验》试题及答案Word文档下载推荐.docx
-
上半年云南省玉溪市华宁县事业单位《综合基础知识》试题Word文件下载.docx
-
上半年湖北省黄石市黄石港区中石化招聘毕业生试题及答案解析Word下载.docx
-
上半年浙江省舟山市普陀区事业单位《职业能力倾向测验》试题及答案Word格式.docx
-
上半年佳木斯职业学院招聘考试《综合基础知识(教育类)》试题Word格式文档下载.docx
-
上海市嘉定区事业单位考试《医学专业能力测验》真题及答案Word文档格式.docx
-
上海市浦东新区邮政储蓄银行招聘试题及答案Word下载.docx
-
上半年泾川县事业单位A类《综合应用能力》试题及答案Word文件下载.docx
-
上饶市万年县上半年事业单位考试《医学基础知识》试题Word文件下载.docx
-
上半年巨鹿县社区专职工作者《综合基础知识》试题Word格式文档下载.docx
-
邵武市精神病防治院医药护技人员考试试题及解析Word文档下载推荐.docx
-
上半年宽甸满族自治县行政(便民)服务中心招聘试题Word格式.docx
-
涉县职教中心教师招聘《教育基础知识》试题及解析Word下载.docx
-
上半年临汾市乡宁县城投集团试题Word文件下载.docx
-
沈阳市新城子区第二医院《医学基础知识》招聘试题及答案Word下载.docx
-
上半年罗城仫佬族自治县审计局招聘考试《审计基础知识》试题及答案Word下载.docx
