 最新中考物理电学综合计算题汇总.docx
最新中考物理电学综合计算题汇总.docx
- 文档编号:9274510
- 上传时间:2023-05-17
- 格式:DOCX
- 页数:16
- 大小:786.51KB
最新中考物理电学综合计算题汇总.docx
《最新中考物理电学综合计算题汇总.docx》由会员分享,可在线阅读,更多相关《最新中考物理电学综合计算题汇总.docx(16页珍藏版)》请在冰点文库上搜索。
最新中考物理电学综合计算题汇总
最新中考物理电学综合计算题汇总
一、电磁学综合题
1.储油过少,滑片向上移动,接入电阻变大,电流变小,电磁铁磁性减弱,衔铁向上,接A触点,红灯亮。
储油过多,滑片向下移动,接入电阻变小,电流变大,电磁铁磁性增强,衔铁被吸下,接B触点,绿灯亮。
(2019·山东中考模拟)物理学中,磁场的强弱用磁感应强度表示,符号是B,单位是T。
磁感应强度的大小和方向都相同的磁场叫做匀强磁场。
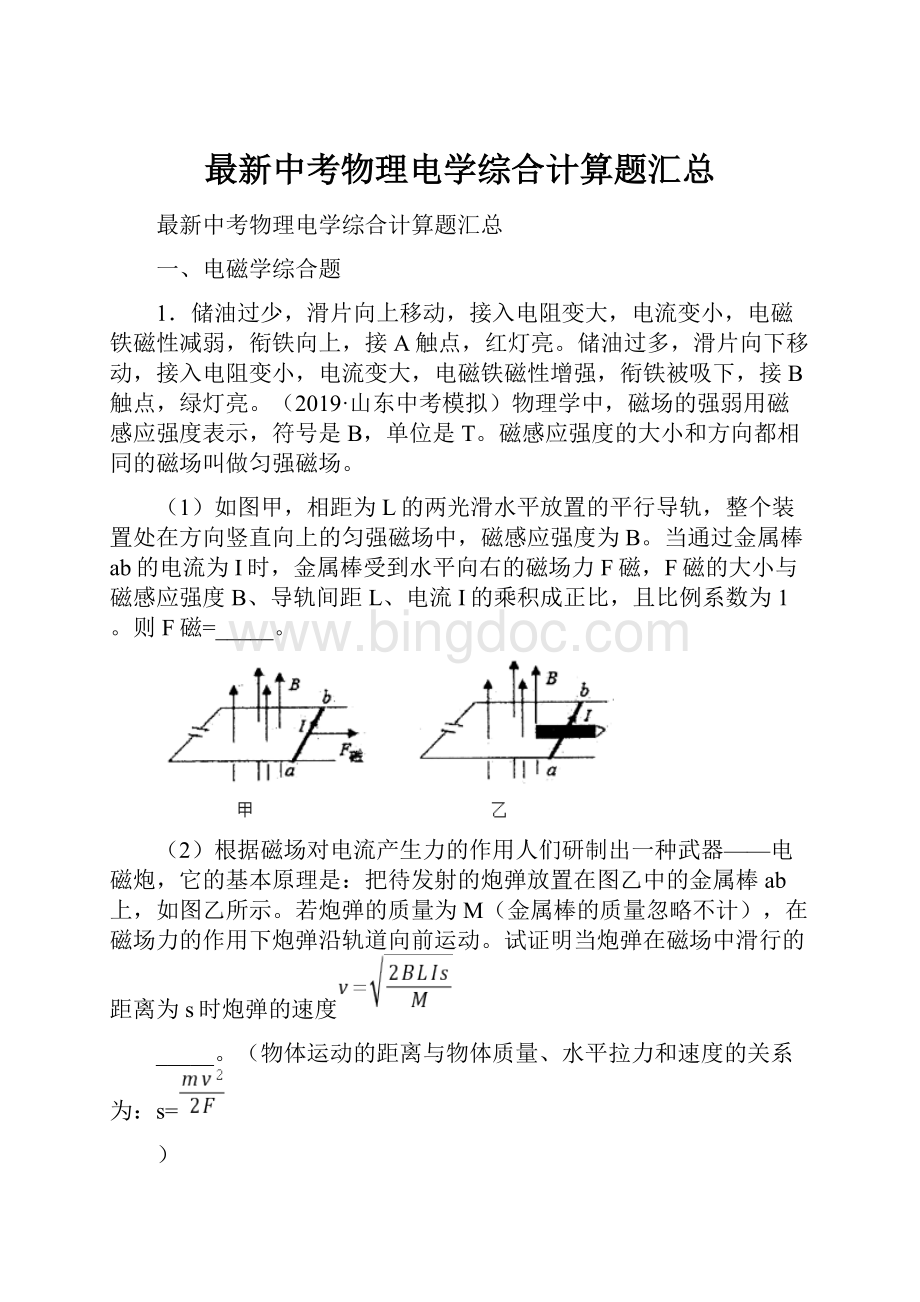
(1)如图甲,相距为L的两光滑水平放置的平行导轨,整个装置处在方向竖直向上的匀强磁场中,磁感应强度为B。
当通过金属棒ab的电流为I时,金属棒受到水平向右的磁场力F磁,F磁的大小与磁感应强度B、导轨间距L、电流I的乘积成正比,且比例系数为1。
则F磁=_____。
(2)根据磁场对电流产生力的作用人们研制出一种武器——电磁炮,它的基本原理是:
把待发射的炮弹放置在图乙中的金属棒ab上,如图乙所示。
若炮弹的质量为M(金属棒的质量忽略不计),在磁场力的作用下炮弹沿轨道向前运动。
试证明当炮弹在磁场中滑行的距离为s时炮弹的速度
_____。
(物体运动的距离与物体质量、水平拉力和速度的关系为:
s=
)
【答案】BIL详见解析
【解析】
【详解】
(1)由F磁的大小与磁感应强度B、导轨间距L、电流I的乘积成正比,且比例系数为1得到,F磁=BIL;
2.Q=W=UIt=220V×30A×10×60s=3.96×106J,(2019·河南中考模拟)有一种电加热恒温箱,工作原理如图甲所示。
控制电路由电压为U1=9V的电源、电磁继电器(线圈电阻不计)、电阻箱R0和热敏电阻R1组成;工作电路由电压为U2=220V的电源和R2=44Ω的电热丝组成。
其中,电磁继电器只有当线圈中电流达到30mA时,衔铁才吸合,切断工作电路;热敏电阻R1的阻值随温度变化关系如图乙所示。
(1)在升温的过程中,电阻R1两端的电压会_____选填“变大”“变小”或“不变”);要使恒温箱设定的温度值升高,应调节滑动变阻器R0的滑片,使其接入电路的阻值____(选填“变大”或“变小”)。
(2)求电热丝工作时的功率和在10min内产生的热量。
_____________
(3)如果恒温箱的温度设定为50℃,求电阻箱R0应接电路的阻值。
__________
【答案】变小变大1100W;6.6×105J200Ω
【解析】
【详解】
(1)从图乙可知,在升温的过程中,热敏电阻的阻值会减小,根据欧姆定律U=IR可知热敏电阻R1两端的电压变小;从图乙可知,要提高恒温箱的设定温度,需减小热敏电阻的阻值,为了使衔铁吸合工作电流即线圈中的电流仍为30mA,根据欧姆定律R=
需要增大电阻箱连入的电阻值,即R0的阻值必须变大;
(2)电热丝工作时的功率:
P=
=1100W,电热丝正常工作10min产生的热量:
Q=W=Pt=1100W×10×60s=6.6×105J;
3.(3)如果恒温箱的温度设定为50℃,由图乙可知,热敏电阻的阻值R1=100Ω,此时控制电路的电流I=30mA=0.03A,I=
,0.03A=
,R0=200Ω。
(2019·江苏中考模拟)阅读短文,回答问题
无人航拍机
无人驾驶飞机简称“无人机”是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
如图甲所示是目前较为流行的某型号无人航拍机,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电。
表一为某型号无人航拍机的部分参数,其中的电池容量是指放电电流与放电总时间的乘积。
表一
额定电压/V
6
额定功率/W
42
电池容量/mAh
1500
工作噪音/dB
<50
遥控距离/m
200
整机质量/g
500
充电时间/min
200
电机转化效率/%
90
无人机有竖直方向的三档风力和水平方向的两档风力,其中竖直方向的升力与风叶转速的平方成正比,对应关系如表二。
产生的升力与风叶转速之比叫做动率,升力与每秒钟通过风叶空气重力之比为转力效率。
表二
风叶转速/(
)
1
1.2
1.4
升力/N
4
动率/(
)
1
(1)无人航拍机在空中悬停、飞行、降落、航拍、降落过程中,下列说法中正确的是________。
A.利用超声波对无人机进行遥控的
B.底座做得比较宽大,是为了减小无人机对地面的压力
C.工作时发出的声音不会对人的听力造成损伤
D.用镜头的焦距要尽量长一点
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力。
这是利用______,当风叶转速为
时,获得的向上的升力为_________N。
(3)该无人机正常工作时的电流为________A;充满电后至下一次自动充电,能够提供无人机工作的机械能为___________J。
(4)由表二数据可知,当转速为
时,无人机的动率为________
。
上述转速下,若风叶的转圈时扫过的面积为
,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为_____kg,转力效率为__________%。
(
)
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。
在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加。
如图乙所示,
为光敏电阻,
为定值电阻,无人机的航拍镜头中将电子镜头电路与__________(光敏/定值)电阻相并联。
【答案】C力的作用是相互的5.767
5.665.5271.8%光敏
【解析】
【详解】
(1)A.无人机利用无线电进行遥控的,而不是超声波,故A错误;
B.底座做得比较宽大,是为了无人机更容易平稳着陆,保证稳定性,故B错误;
C.工作时发出的声音小于50dB,所以不会对人的听力造成损伤,故C正确;
D.摄像机的镜头相当于一个凸透镜,其成像的原理是:
当物距大于二倍焦距时,凸透镜成倒立缩小的实像;当物距增大时,像距减小,也就是当无人机高度上升时增大了物距,这时需减小镜头与感光晶片的距离,所以焦距并非越长越好,才能拍摄到清晰的画面,故D错误。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,风给直升机一个反作用力进而增大了无人机向上的升力,这是利用力的作用是相互的原理;其中竖直方向的升力与风叶转速的平方成正比,所以可列:
F升=kr转2,对应关系如表二,当升力为4N时,转速为
,代入上式可知k=4,F升=4r转2①,所以当风叶转速为
时,代入公式①可知,获得的向上的升力为5.76N。
(3)该无人机正常工作时额定电压6V,额定功率为42W,根据P=UI可知该无人机正常工作时的电流为
;充满电后电量为1500mAh=1.5Ah,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电,所以至下一次自动充电用时为
,耗时能够提供无人机工作的机械能为(电机转化率为90%):
。
(4)根据F升=4r转2,由表二数据可知,当转速为
时,无人机的升力为7.84N,又因为产生的升力与风叶转速之比叫做动率,所以动率为
;上述转速下,若风叶的转圈时扫过的面积为
,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为
,因为升力与每秒钟通过风叶空气重力之比为转力效率,每秒钟通过风叶空气重力为所以转力效率:
。
4.由图象可知,该装置所能测量的最大风力为720N。
(2019·湖北中考模拟)饮水机是一种常用的家用电器,图甲为饮水机结构剖面图,其加热水槽部分工作原理电路图如图乙所示,其中S是温控开关,R1是加热电阻,R2是定值电阻。
当饮水机处于加热状态时,水被迅速加热,达到预定温度时,S自动切换到另处于保温状态.请回答下列问题:
(1)当开关S与________接触时,此时饮水机处于保温状态。
(2)若饮水机加热时加热管的功率为550W,而保温时加热管的功率为88W,求电阻R2的阻值____(不考虑温度对阻值的影响,且不计指示灯的阻值)。
(3)如图甲控水槽内浮体A与阀门C固定相连,当A恰好浸没时阀门C关闭,A未浸没时C略有下降,桶内水流入控水槽中。
己知浮体A的体积为55cm3,阀门C的横截面积为1cm2;浮体A与阀门C共重0.15N,(不计大气压强)。
求:
①浮体A浸没时所受浮力为多大?
______
②桶内水位的最大高度是多少?
__________
【答案】b132Ω0.55N0.4m
【解析】
【详解】
(1)由图乙知,S接a时,R1与红灯串联;S接b时,R1、R2、绿灯串联。
不计指示灯的阻值,所以S接b时,电路中电阻大,电压一定时,由P=
可知此时电路消耗功率较小,此时为保温状态;则S接a时为加热状态;
(2)S接a时为加热状态,加热时加热管的功率为550W,R1的阻值:
R1=
=88Ω,S接b时为保温状态,R1和R2串联,此时加热管的功率为88W(即R1的功率为88W),电路中电流:
I=I1=
=1A,
由欧姆定律可得:
R1+R2=
=220Ω,
所以R2=220Ω-88Ω=132Ω;
(3)①浮体A完全浸没时受到的浮力:
F浮=ρ水V排g=1.0×103kg/m3×55×10-6m3×10N/kg=0.55N;
5.(3)加热水箱中水的质量
=1.0×103kg/m3×1.1×10−3m3=1.1kg,水吸收的热量:
=4.2×103J/(kg⋅℃)×1.1kg×(92℃−20℃)=3.3264×105J,加热管的热效率为90%,根据
,则电热管需要放出的热量是:
,饮水机加热时加热管的功率为880W,则加热的是时间为:
.(2019·扬州市竹西中学中考模拟)动车快速、安全、舒适,广受出行乘客的喜欢,动车采用多种新材料、新工艺。
(1)如图甲,前挡风玻璃倾斜度较大,其目的是_______________.
(2)高速行驶时,为了防止外力导致挡风玻璃破碎飞溅,设计了挡风玻璃由两层钢化玻璃中间夹一层PVB胶片制成的结构,这样做的好处_____________.
(3)为检验玻璃是否达到每m2面积能承受5×105N撞击力的要求,科研小组设计如图乙电路。
测试时,将样品平放在压力传感器上,闭合开关S,释放重物撞击,样品完好无损.传感器阻值RN随压力F变化图象如图丙,撞击力最大时玻璃与重物的接触面积为1×10-3m2;电源电压为27V,定值电阻R0=10Ω.(样品质量不计)
①由图可知,压力传感器的阻值随压力增大而_______________.
②测试时,电流表示数随时间的变化图象是__________,其理由是_____________________.
③电流最大时为0.9A,则每m2面积最大撞击力为__________N,这种玻璃________合格品.(是/不是)
【答案】减小阻力外力使玻璃破碎时,碎片仍然粘在胶片上减小C见解析4×105N不是
【解析】
【详解】
(1)是因为动车的整个车身设计采用的是空气动力学原理,前挡风玻璃是有一定的倾斜角度,这样可以减轻空气的阻力;
(2)这种玻璃受外力损坏时,玻璃碎片仍然粘在胶片上,而不会飞出给车上乘员造成二次伤害。
(3)①如图丙所示,当压力增大时,传感器的电阻值会变小;
②由图丙可知,当重物对传感器产生的压力在0−200N时,传感器的电阻不变,根据I=
可知,此过程中电流表的示数不改变,当传感器受到的压力大于200N时,其阻值会逐渐减小,当被压至最低点是产生的压力最大,此时电路中的电阻最小,电流表的示数为最大,当压力传感器从最低点向上弹起时,其所受的压力会逐渐变小,电阻变大,电路中的电流也会变小。
因此可知C图象符合题意;
③电流最大为I大=0.9A,电路中的总电阻:
R串=
=
=30Ω,
压力传感器RN阻值:
RN=R串−R0=30Ω−10Ω=20Ω,
由图丙可知,压力传感器受到的压力为400N
6.(5)若在R1两端并联一个电压表,电流表与电压表的示数的比值等于R1的阻值,R1是定值电阻,因此电流表与电压表的示数成正比。
(2019·江苏中考模拟)图甲是小灯泡的电压一电流图象.将此灯泡L与滑动变阻器R串联在电压为4.5V的电路中(如图乙),闭合开关,移动滑片P,当小灯泡的功率为0.75W时,
(1)电流表的示数为________A;
(2)滑动变阻器R接入电路中的电阻为_________Ω;
(3)电路消耗的总功率为_________W;
(4)10s内滑动变阻器R产生的热量为________J.
【答案】0.36.71.356
【解析】
【详解】
(1)当小灯泡的功率为0.75W时,根据图甲可知,灯泡L两端的电压为2.5V,通过灯泡的电流为I=0.3A,即电流表的示数为0.3A;
(2)根据串联电路电压的规律,变阻器两端的电压:
U滑=U−UL=4.5V−2.5V=2V,
由I=UR可得,滑动变阻器R接入电路中的电阻:
;
(3)电路消耗的总功率:
P总=U总I=4.5V×0.3A=1.35W;
7.
(2)当一个电加热器消耗的功率是800W,另一个电加热器消耗的功率是1200W时,将已知量代入
得整个电路消耗的功率:
。
(2019·辽宁中考模拟)如图甲所示,2018年12月8日,我国在西吕卫星发射中心用长征三号乙运载火箭成功发射嫦娥四号探测器(它由着陆器与巡视器组成,巡视器命名为“玉兔二号”),于2019年1月3日成功着陆在月球背面,开展月球背面探测及巡视探测。
月球重力是地球的六分之一,月球表面土壤非常松软,凹凸不平,有石块、有陨石坑,还有陡峭的高坡。
在这种环境中,月球车既不能打滑,更不能翻车。
为了克服这些困难,“玉兔二号”上有全景相机和导航相机,底部有6个带齿纹的轮子着地。
(1)长运三号火箭携带着嫦娥四号竖直发射加速升空时,下列说法正确的是_____。
A.以长运三号火箭为参照物,此时嫦娥四号是运动的
B.长运三号火箭刚离开地面向上飞行过程中只受空气阻力和推力作用
C.长运三号火箭加速升空时,重力势能增大,动能增大
D.长运三号火箭在大气层时候与大气剧烈摩擦,此时内能转化为机械能
(2)玉兔二号巡视器(图乙)在月球表面行走时,当前方一定范围内有高于20cm的障碍物时,玉免二号上的测器会发出预警,从而及时修正路线,此探测器是利用_____(选项“超声波”或“电波”)的反射来工作的。
(3)图甲和图乙是嫦四号玉免二号互拍照片,为了使对方五红旗标志看的更清晰更大一些,此时应让玉免二号_____(选填“靠近”成“远离”)嫦娥四号。
(4)玉免二号设计质量140kg,底部有6个带齿纹的轮子着地,带齿轮的目的是_____;若每个轮子触地面积100cm2,则玉免二号对月球地面的压强为_____Pa.
(5)当玉兔二号需要采集月球表面岩石样本时,会从物部伸出如图丙所示机械臂,机械臂简化图如图了所示。
请在图中画出:
①加在A点的最小动力F1②画山阻力F2的力臂。
(__________)
【答案】C电磁波靠近增大接触面的粗糙程度,增大摩擦3883
【解析】
【详解】
(1)A、火箭在加速升空过程中,以火箭为参照物,嫦娥四号探测器相对于火箭的位置没有发生变化,所以是静止的,故错误;
B、长运三号火箭刚离开地面向上飞行过程中受重力、空气阻力和推力作用,故错误;
C、火箭加速升空的过程中,火箭的质量不变,速度增大,动能增大;高度增加,重力势能增大,故正确;
D、长运三号火箭在大气层时候与大气剧烈摩擦,此时机械能转化为内能,故错误。
(2)月球上没有空气,声音不能在真空中传播,因此不能用超声波来探测障碍物,障碍物探测器是利用电磁波的反射来工作;
(3)用照相机来拍照,为了使对方五红旗标志看的更清晰更大一些,由凸透镜成实像规律,物距越小,成的像越大,像距也越大,可知此时应让玉免二号靠近嫦娥四号;
(4)玉兔号底部有6个带齿纹的轮子的目的是通过增加接触面的粗糙程度的方法来增大摩擦力;玉兔号月球车在地球上所受重力为:
,因为月球引力只是地球引力的六分之一,故
,月球车对月球地面的压强为:
;
(5)过O点作阻力F2的垂线,即为阻力F2对支点O的力臂L2,在阻力、阻力臂一定的情况下,要使动力最小,动力臂需要最长,阻力的方向已标出,所以动力的方向应该向上,过A点作OA的垂线就得到在A点施加的最小动力F1,如下图所示:
8.(2019·广东中考模拟)无人机航拍影像具有高清晰、高现实性的优点。
下表是某小型无人机的部分参数:
参数名称
最大飞行半径/km
最大巡航速度km/h
电池电压/V
电池容量/mAh
电动机额定功率/W
拍摄速度/帧/秒
数据
5
50
24
2500
20
11000
(电池容量=放电电流×放电时间,例如,1mAh是指以1mA的电流能连续工作lh。
帧/秒是指每秒拍摄的画面数)。
(1)人们是利用遥控器通过_____传输信息操控无人机的,其有效操控距离至少为_____km。
(2)小轿车在高速公路上限速120km/h。
如图甲所示,交警部门利用无人机进行高速公路通行情况的实时监测。
一辆小轿车在通行0.5m的过程中,高速摄像机拍摄帧数为110帧,据此判断小轿车是否超速?
_____(是/否)。
(3)如图乙,是无人机竖直向上运动的v﹣t图象,由图象可知,在0~5s内,无人机受到的升力_____(>/=/<)重力。
(4)电动机是控制无人机飞行状态的关键动力设备,当它正常工作时,12s内消耗的电能是_____J.已知电动机消耗的功率是电源总功率的50%,则无人机在空中以额定功率飞行的时间不能超过_____h。
(5)为增大小型无人机的巡航时间,请从研制方面,提出一条合理化建议:
_____。
【答案】电磁波5是>2401.5减轻无人机的质量
【解析】
【详解】
(1)人们是利用遥控器通过电磁波传输信息来操控无人机的;由图表中数据可知,最大飞行半径为5km,故有效操控距离至少为5km;
(2)高速摄像机拍摄1帧画面需要的时间
高速摄像机拍摄帧数为110帧所需的时间:
t=110×
=0.01s,
小轿车的速度:
小轿车已经超速。
(3)分析图乙可知,由图象可知,在0~5s内,无人机做加速运动,则无人机处于非平衡状态,升力大于重力;
(4)无人机飞行状态正常工作时,12s内消耗的电能:
W=Pt=20W×12s=240J;
无人机电源的总能量:
W总=UIt=24V×2.5A×1×3600s=216000J;
电动机消耗的能量是电源总能量的50%:
W′=50%W总=50%×216000J=108000J,
由
可得,无人机在空中以额定功率飞行的时间:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 最新 中考 物理 电学 综合 算题 汇总
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《赶海》的教学设计.docx
《赶海》的教学设计.docx
-
《谏逐客书》文言现象翻译默写选择阅读习题必修下册.docx
-
《05 》教学设计和期末教学论文.docx
-
《美丽心灵》的观后感.docx
-
《化学反应的快慢和限度》教案鲁科版必修2.docx
-
《数据库系统及应用》高教第二版习题解答.docx
-
《离子反应》教学设计.docx
-
《佘山银湖别墅》分阶段营销策略报告.docx
-
《外国小说欣赏》教学中阅读主体的缺失与重塑.docx
-
《电工基础》试题工程类.docx
-
《用人单位职工参加社会保险承诺书》.docx
-
06G1016陈青来解疑.docx
-
08版标准化就业经理.docx
-
10篇部编版小学语文三年级上册课内外阅读理解专项训练完整版含答案.docx
-
15MW风电机组运行维护手册.docx
-
27图形的相似全章导学案 1.docx
-
99TcmM IBI联合γ探测仪定位甲状旁腺瘤.docx
-
00642传播学概论笔记.docx
-
123402G05A29A0 认证产品元器件变更流程.docx
-
chapter 10 lg culture adn society for BA.docx
-
Dktifa托福听力讲座类高频专业词汇分类汇编.docx
-
ktv装修合同书.docx
-
Unit9Whatdoeshelooklike教案新版人教新目标版.docx
-
《邓稼先》《口技》课后题及答案.docx
-
《和氏献璧》教学设计.docx
-
《宿舍信息管理系统》需求分析说明书.docx
-
1教育学复习确定版10.docx
-
2万吨汽车配件制造项目可行性研究报告.docx
-
5 QTZ50塔式起重机安拆方案及多塔防碰.docx
-
9岗位职责.docx
-
19雾在哪里19雾在哪里.docx
-
42《水的组成》表格上课学习上课学习教案.docx
-
2021年国家开放大学电大社会心理学形考任务1答案文档格式.docx
-
纺织车间承包合同Word格式文档下载.docx
-
餐饮部述职报告范文Word文件下载.docx
-
机修钳工初级实操试卷2—职业技能培训鉴定参考资料Word文档格式.doc
-
河北省邢台市邢台县上半年农业系统招聘试题《农业技术推广》文档格式.docx
-
关于雷锋叔叔的故事文档格式.docx
-
YXQWG203卫生级高端灭菌柜验证方案IQWord下载.docx
-
四年级上册语文78单元通案21课时Word文档下载推荐.docx
-
统编版语文五年级下册古诗词三首 说课稿文档格式.docx
-
二年级上册加减法竖式计算练习题80Word文档格式.docx
-
TKDK型铁路客车电气综合控制柜简介Word文档格式.docx
-
河池市巴马瑶族自治县(卫生类)招聘考试《护理学》试卷Word格式文档下载.docx
-
江苏省五年制高等职业教育物理课程标准Word格式.docx
-
汽轮机技术员个人技术总结Word格式文档下载.docx
-
微观经济学62Word格式.docx
-
形形色色的人作文600字精选范文Word格式.docx
-
湖南省娄底地区涟源市下半年气象部门《专业基础知识》文档格式.docx
-
学年高中语文人教版选修中外传记作品选读 第2课 鲁迅深刻与伟大的另一面是平和 Word版含答案Word文件下载.docx
-
旅游景区导游讲解存在问题及解决对策Word格式.docx
