 毕业设计倒立摆英文版.docx
毕业设计倒立摆英文版.docx
- 文档编号:17891336
- 上传时间:2023-08-04
- 格式:DOCX
- 页数:85
- 大小:204.10KB
毕业设计倒立摆英文版.docx
《毕业设计倒立摆英文版.docx》由会员分享,可在线阅读,更多相关《毕业设计倒立摆英文版.docx(85页珍藏版)》请在冰点文库上搜索。
毕业设计倒立摆英文版
Example:
ModelinganInvertedPendulum
Problemsetupanddesignrequirements
Forceanalysisandsystemequations
Matlabrepresentationandtheopen-loopresponse
Problemsetupanddesignrequirements
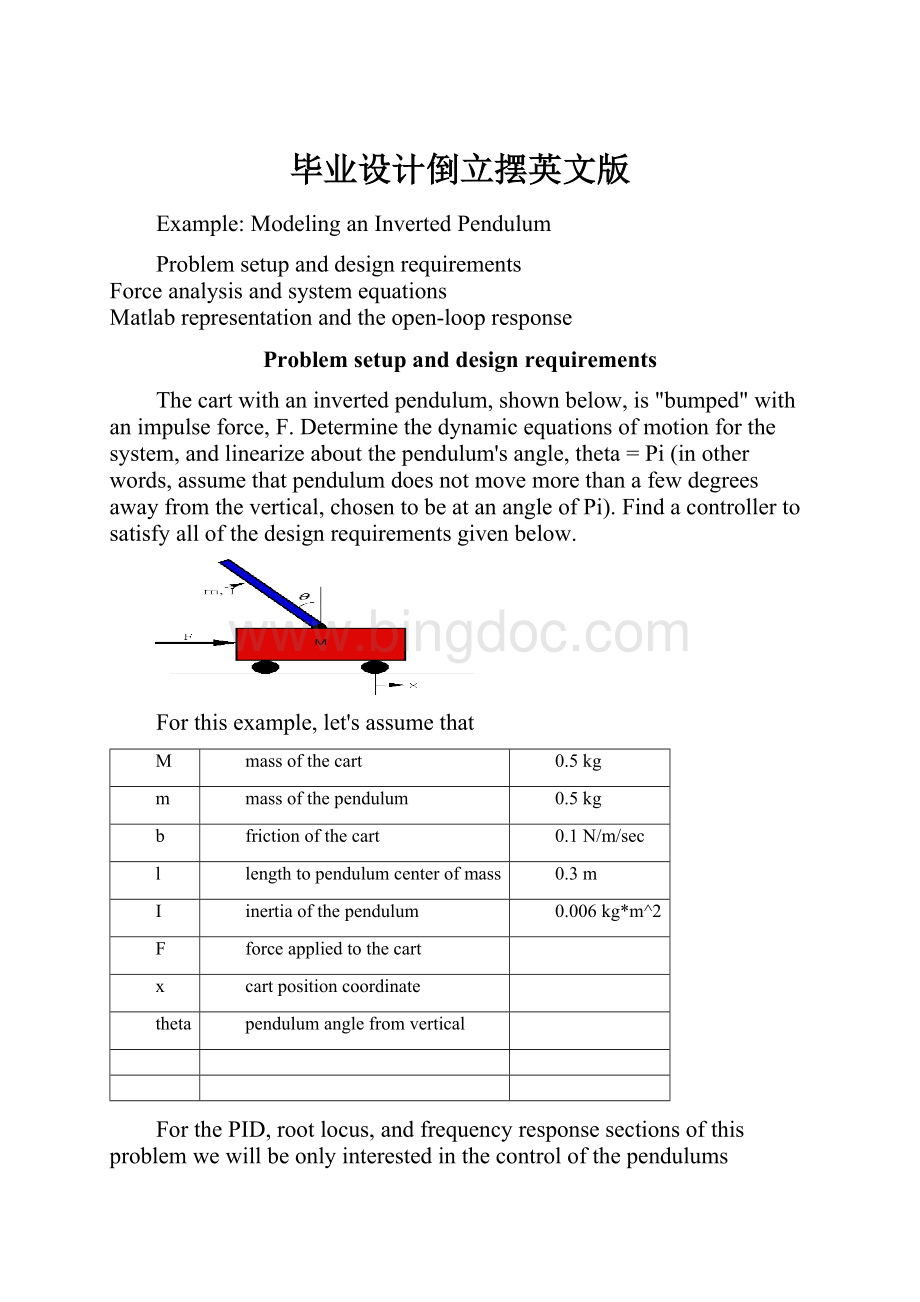
Thecartwithaninvertedpendulum,shownbelow,is"bumped"withanimpulseforce,F.Determinethedynamicequationsofmotionforthesystem,andlinearizeaboutthependulum'sangle,theta=Pi(inotherwords,assumethatpendulumdoesnotmovemorethanafewdegreesawayfromthevertical,chosentobeatanangleofPi).Findacontrollertosatisfyallofthedesignrequirementsgivenbelow.
Forthisexample,let'sassumethat
M
massofthecart
0.5kg
m
massofthependulum
0.5kg
b
frictionofthecart
0.1N/m/sec
l
lengthtopendulumcenterofmass
0.3m
I
inertiaofthependulum
0.006kg*m^2
F
forceappliedtothecart
x
cartpositioncoordinate
theta
pendulumanglefromvertical
ForthePID,rootlocus,andfrequencyresponsesectionsofthisproblemwewillbeonlyinterestedinthecontrolofthependulumsposition.Thisisbecausethetechniquesusedinthesetutorialscanonlybeappliedforasingle-input-single-output(SISO)system.Therefore,noneofthedesigncriteriadealwiththecart'sposition.Forthesesectionswewillassumethatthesystemstartsatequilibrium,andexperiencesanimpulseforceof1N.Thependulumshouldreturntoitsuprightpositionwithin5seconds,andnevermovemorethan0.05radiansawayfromthevertical.
Thedesignrequirementsforthissystemare:
∙Settlingtimeoflessthan5seconds.
∙Pendulumanglenevermorethan0.05radiansfromthevertical.
However,withthestate-spacemethodwearemorereadilyabletodealwithamulti-outputsystem.Therefore,forthissectionoftheInvertedPendulumexamplewewillattempttocontrolboththependulum'sangleandthecart'sposition.Tomakethedesignmorechallengingwewillbeapplyingastepinputtothecart.Thecartshouldachieveit'sdesiredpositionwithin5secondsandhavearisetimeunder0.5seconds.Wewillalsolimitthependulum'sovershootto20degrees(0.35radians),anditshouldalsosettleinunder5seconds.
ThedesignrequirementsfortheInvertedPendulumstate-spaceexampleare:
∙Settlingtimeforxandthetaoflessthan5seconds.
∙Risetimeforxoflessthan0.5seconds.
∙Overshootofthetalessthan20degrees(0.35radians).
Forceanalysisandsystemequations
BelowarethetwoFreeBodyDiagramsofthesystem.
SummingtheforcesintheFreeBodyDiagramofthecartinthehorizontaldirection,yougetthefollowingequationofmotion:
Notethatyoucouldalsosumtheforcesintheverticaldirection,butnousefulinformationwouldbegained.SummingtheforcesintheFreeBodyDiagramofthependuluminthehorizontaldirection,youcangetanequationforN:
Ifyousubstitutethisequationintothefirstequation,yougetthefirstequationofmotionforthissystem:
(1)
Togetthesecondequationofmotion,sumtheforcesperpendiculartothependulum.Solvingthesystemalongthisaxisendsupsavingyoualotofalgebra.Youshouldgetthefollowingequation:
TogetridofthePandNtermsintheequationabove,sumthemomentsaroundthecentroidofthependulumtogetthefollowingequation:
Combiningtheselasttwoequations,yougettheseconddynamicequation:
(2)
SinceMatlabcanonlyworkwithlinearfunctions,thissetofequationsshouldbelinearizedabouttheta=Pi.Assumethattheta=Pi+ø(ørepresentsasmallanglefromtheverticalupwarddirection).Therefore,cos(theta)=-1,sin(theta)=-ø,and(d(theta)/dt)^2=0.Afterlinearizationthetwoequationsofmotionbecome(whereurepresentstheinput):
1.TransferFunction
Toobtainthetransferfunctionofthelinearizedsystemequationsanalytically,wemustfirsttaketheLaplacetransformofthesystemequations.TheLaplacetransformsare:
NOTE:
Whenfindingthetransferfunctioninitialconditionsareassumedtobezero.
SincewewillbelookingattheanglePhiastheoutputofinterest,solvethefirstequationforX(s),
thensubstitutingintothesecondequation:
Re-arranging,thetransferfunctionis:
where,
Fromthetransferfunctionaboveitcanbeseenthatthereisbothapoleandazeroattheorigin.Thesecanbecanceledandthetransferfunctionbecomes:
2.State-Space
Afteralittlealgebra,thelinearizedsystemequationsequationscanalsoberepresentedinstate-spaceform:
TheCmatrixis2by4,becauseboththecart'spositionandthependulum'spositionarepartoftheoutput.Forthestate-spacedesignproblemwewillbecontrollingamulti-outputsystemsowewillbeobservingthecart'spositionfromthefirstrowofoutputandthependulum'swiththesecondrow.
Matlabrepresentationandtheopen-loopresponse
1.TransferFunction
ThetransferfunctionfoundfromtheLaplacetransformscanbesetupusingMatlabbyinputtingthenumeratoranddenominatorasvectors.Createanm-fileandcopythefollowingtexttomodelthetransferfunction:
M=.5;
m=0.2;
b=0.1;
i=0.006;
g=9.8;
l=0.3;
q=(M+m)*(i+m*l^2)-(m*l)^2;%simplifiesinput
num=[m*l/q0]
den=[1b*(i+m*l^2)/q-(M+m)*m*g*l/q-b*m*g*l/q]
Youroutputshouldbe:
num=
4.54550
den=
1.00000.1818-31.1818-4.4545
Toobservethesystem'svelocityresponsetoanimpulseforceappliedtothecartaddthefollowinglinesattheendofyourm-file:
t=0:
0.01:
5;
impulse(num,den,t)
axis([01060])
Note:
Matlabcommandsfromthecontrolsystemtoolboxarehighlightedinred.
Youshouldgetthefollowingvelocityresponseplot:
Asyoucanseefromtheplot,theresponseisentirelyunsatisfactory.Itisnotstableinopenloop.Youcanchangetheaxistoseemoreoftheresponseifyouneedtoconvinceyourselfthatthesystemisunstable.
1.State-Space
Below,weshowhowtheproblemwouldbesetupusingMatlabforthestate-spacemodel.Ifyoucopythefollowingtextintoam-file(orintoa'.m'filelocatedinthesamedirectoryasMatlab)andrunit,MatlabwillgiveyoutheA,B,C,andDmatricesforthestate-spacemodelandaplotoftheresponseofthecart'spositionandpendulumangletoastepinputof0.2mappliedtothecart.
M=.5;
m=0.2;
b=0.1;
i=0.006;
g=9.8;
l=0.3;
p=i*(M+m)+M*m*l^2;%denominatorfortheAandBmatricies
A=[0100;
0-(i+m*l^2)*b/p(m^2*g*l^2)/p0;
0001;
0-(m*l*b)/pm*g*l*(M+m)/p0]
B=[0;
(i+m*l^2)/p;
0;
m*l/p]
C=[1000;
0010]
D=[0;
0]
T=0:
0.05:
10;
U=0.2*ones(size(T));
[Y,X]=lsim(A,B,C,D,U,T);
plot(T,Y)
axis([020100])
Youshouldseethefollowingoutputafterrunningthem-file:
A=
01.000000
0-0.18182.67270
0001.0000
0-0.454531.18180
B=
0
1.8182
0
4.5455
C=
1000
0010
D=
0
0
Thebluelinerepresentsthecart'spositionandthegreenlinerepresentsthependulum'sangle.Itisobviousfromthisplotandtheoneabovethatsomesortofcontrolwillhavetobedesignedtoimprovethedynamicsofthesystem.Fourexamplecontrollersareincludedwiththesetutorials:
PID,rootlocus,frequencyresponse,andstatespace.Selectfrombelowtheoneyouwouldliketouse.
Note:
ThesolutionsshowninthePID,rootlocusandfrequencyresponseexamplesmaynotyieldaworkablecontrollerfortheinvertedpendulumproblem.Asstatedpreviously,whenweputthisproblemintothesingle-input,single-outputframework,weignoredthexpositionofthecart.Thependulumcanbestabilizedinaninvertedpositionifthexpositionisconstantorifthecartmovesataconstantvelocity(noacceleration).Wherepossibleintheseexamples,wewillshowwhathappenstothecart'spositionwhenourcontrollerisimplementedonthesystem.WeemphasizethatthepurposeoftheseexamplesistodemonstratedesignandanalysistechniquesusingMatlab;nottoactuallycontrolaninvertedpendulum.
ModelingExamples
CruiseControl|MotorSpeed|MotorPosition|BusSuspension|InvertedPendulum|PitchController|Ball&Beam
InvertedPendulumExamples
Modeling|PID|RootLocus|FrequencyResponse|StateSpace|DigitalControl
Example:
SolutiontotheInvertedPendulumProblemUsingPIDControl
Open-loopRepresentation
Closed-looptransferfunction
AddingthePIDcontroller
Whathappenstothecart'sposition?
Thetransferfunctionoftheplantforthisproblemisgivenbelow:
where,
Thedesigncriteria(withthependulumreceivinga1Nimpulseforcefromthecart)are:
∙Settlingtimeoflessthan5seconds.
∙Pendulumshouldnotmovemorethan0.05radiansawayfromthevertical.
Toseehowthisproblemwasoriginallysetup,consulttheinvertedpendulummodelingpage.
Open-loopRepresentation
ThefirstthingtodowhenusingPIDcontrolinMatlabistofindthetransferfunctionofthesystemandtochecktoseeifitmakessense.ThetransferfunctionfoundfromtheLaplacetransformsfortheoutputPhi(thependulum'sangle)canbesetupusingMatlabbyinputtingthenumeratoranddenominatorasvectors.Createanm-file(ora'.m'filelocatedinthesamedirectoryasMatlab)andcopythefollowingtexttomodelthetransferfunction:
M=.5;
m=0.2;
b=0.1;
i=0.006;
g=9.8;
l=0.3;
q=(M+m)*(i+m*l^2)-(m*l)^2;%simplifiesinput
num=[m*l/q0]
den=[1b*(i+m*l^2)/q-(M+m)*m*g*l/q-b*m*g*l/q]
Youroutputshouldbe:
num=
4.54550
den=
1.00000.1818-31.1818-4.4545
Closed-looptransferfunction
Thecontrolofthisproblemisalittledifferentthanthestandardcontrolproblemsyoumaybeusedto.Sincewearetryingtocontrolthependulum'sposition,whichshouldreturn


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 毕业设计 倒立 英文
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《财政学》期末习题.docx
《财政学》期末习题.docx
-
《画长方形》说课稿.docx
-
《梅花玉工艺特征及保健功效》孟宪松.docx
-
《食品安全法》试题标准答案.docx
-
《幼儿教育》幼儿园主题活动恐龙教案精选.docx
-
3套打包临汾市六年级上册英语期末单元检测试题含答案.docx
-
12层学生宿舍楼框架剪力墙结构设计书.docx
-
《大学生创业基础》期末考试分.docx
-
《机械制造工程学》复习思考题XXXX.docx
-
《企业安全生产标准化基本规范》GBT.docx
-
《水溶液》知识精析.docx
-
《只有一个地球》导学案设.docx
-
4岁宝宝学习计划.docx
-
16年级语文教学大纲及重难点.docx
-
80岁大寿给长辈的简短祝寿词.docx
-
AAA交通安全文明知识docx.docx
-
CROSS十字教程 十字天书共13页.docx
-
《出师表》教学设计15篇.docx
-
《黄金冲刺》度中考语文作文复习2选材二教学案.docx
-
《尼尔斯骑鹅历险记》读后感15篇.docx
-
《谁的本领大》课堂教学案例.docx
-
《长方体的认识》教学设计.docx
-
4s店工作总结及工作计划范文5篇.docx
-
14管道系统冲吹洗脱脂检验记录.docx
-
40常见蔬菜及分类配图.docx
-
A4安全检查表分析SCLLS评价记录最新修正版精心整理.docx
-
CMACast广播节目表第二章10省通道组.docx
-
FAS一体化触摸屏操作台使用手册范本.docx
-
《高级财务会计》形成性考核册参考答案作业2.docx
-
《课堂教学的50个细节》读书摘记.docx
-
《人体生理学》课程作业及答案.docx
-
《乡下人家》教案15篇.docx
-
云南省怒江傈僳族自治州贡山独龙族怒族自治县农业银行考试试题及答案Word文档格式.docx
-
《南昌起义》剧本Word文档格式.docx
 珍爱生命健康成长主题班会ppt课件 (1).ppt
珍爱生命健康成长主题班会ppt课件 (1).ppt
-
2022基层机关党委党支部党建工作总结pPPT模板.pptx
-
党史学习教育学习党史知识讲课稿Word文档格式.docx
-
人教版七年级下册思想品德复习提纲完整精品Word格式.docx
-
能力素质模型制定指引手册Word格式文档下载.docx
-
青岛市度优秀工程勘察设计项目评选结果Word文档下载推荐.docx
-
成绩报告单四3Word文件下载.docx
-
人教版三年级数学下册全册教案Word格式.docx
-
医院感染管理工作计划文档格式.doc
-
年产1万吨镁合金板材项目可行性研究报告文档格式.docx
-
2021年机关单位党史学习教育计划表(通用版)文档格式.docx
-
初级会计师《会计实务》考点巩固第一章 11Word文档格式.docx
-
人教版小学毕业考试总复习资料Word文件下载.docx
-
年产各类纱布产品1800吨技改迁建项目Word格式文档下载.docx
-
三年级数学上册速算口算50Word文档下载推荐.docx
-
年终考评个人工作总结0Word下载.docx
-
码头港口装卸作业制度 1文档格式.docx
