 Matlab大作业.docx
Matlab大作业.docx
- 文档编号:15715253
- 上传时间:2023-07-07
- 格式:DOCX
- 页数:22
- 大小:406.95KB
Matlab大作业.docx
《Matlab大作业.docx》由会员分享,可在线阅读,更多相关《Matlab大作业.docx(22页珍藏版)》请在冰点文库上搜索。
Matlab大作业
Matlab大作业
(组内成员:
彭超杰、南彦东、江明伟)
一、研究模型
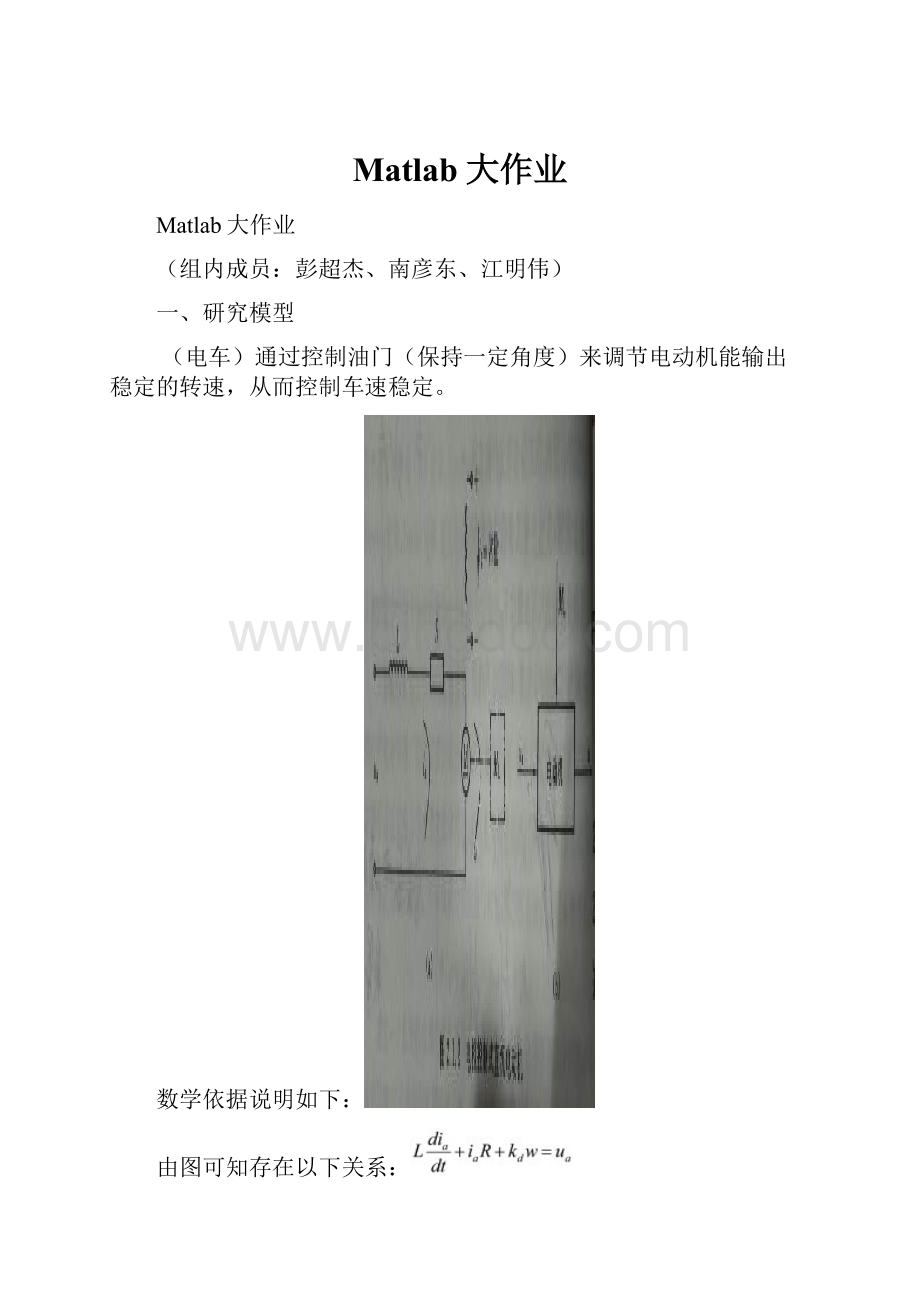
(电车)通过控制油门(保持一定角度)来调节电动机能输出稳定的转速,从而控制车速稳定。
数学依据说明如下:
由图可知存在以下关系:
(
)
为反电势常数,
为电动机电磁力矩常数,这里忽略阻尼力矩。
二、数学模型
再看整个研究对象,示意图以课本为依据,不同点是这里将数控的进给运动,转换为汽车行驶所需要的扭矩。
(这里不说明扭矩的具体产生过程,仅仅说明输出车轮旋转的角速度w)
对照课本不同,
变为
,
,
为电动机的转速,
为轮胎的转速,
为电动机的光轴齿轮的齿数,
为与轮胎相连光轴的齿轮齿数。
,
同理,忽略电枢绕组的电感L,简化系统传递函数方框图如下
三、系统分析
1.分析时间响应
其传递函数如下:
(1)系统时间响应
令τ=0、τ=0.0125、τ=0.025,应用impulse函数,可得到系统单位脉冲响应;应用step函数,可得系统单位跃阶响应。
其程序与曲线图像如下:
t=0:
0.001:
1;
%
nG=[109.375];
tao=0;dG=[3.1251+109.375*tao109.375];G1=tf(nG,dG);
tao=0.0125;dG=[3.1251+109.375*tao109.375];G2=tf(nG,dG);
tao=0.025;dG=[3.1251+109.375*tao109.375];G3=tf(nG,dG);
%
[y1,T]=impulse(G1,t);[y1a,T]=step(G1,t);
[y2,T]=impulse(G2,t);[y2a,T]=step(G2,t);
[y3,T]=impulse(G3,t);[y3a,T]=step(G3,t);
%
subplot(121),plot(T,y1,'--',T,y2,'-',T,y3,'-')
legend('tao=0','tao=0.0125','tao=0.025')
xlabel('t(sec)'),ylabel('x(t)');gridon;
subplot(122),plot(T,y1a,'--',T,y2a,'-',T,y3a,'-')
legend('tao=0','tao=0.0125','tao=0.025')
gridon;xlabel('t(sec)'),ylabel('x(t)');
(2)系统的瞬态性能指标
分别计算在τ=0、τ=0.0125、τ=0.025时系统的性能指标.其程序与结果如下:
t=0:
0.001:
1;
yss=1;dta=0.02;
%
nG=[109.375];
tao=0;dG=[3.1251+109.375*tao109.375];G1=tf(nG,dG);
tao=0.0125;dG=[3.1251+109.375*tao109.375];G2=tf(nG,dG);
tao=0.025;dG=[3.1251+109.375*tao109.375];G3=tf(nG,dG);
y1=step(G1,t);y2=step(G2,t);y3=step(G3,t);
%
r=1;whiley1(r) tr1=(r-1)*0.001; % [ymax,tp]=max(y1);tp1=(tp-1)*0.001; % mp1=(ymax-yss)/yss; % s=1001;whiley1(s)>1-dta&y1(s)<1+dta;s=s-1;end ts1=(s-1)*0.001; % r=1;whiley2(r) tr2=(r-1)*0.001;[ymax,tp]=max(y2); tp2=(tp-1)*0.001;mp2=(ymax-yss)/yss; s=1001;whiley2(s)>1-dta&y3(s)<1+dta;s=s-1;end ts2=(s-1)*0.001; % r=1;whiley3(r) tr3=(r-1)*0.001;[ymax,tp]=max(y3); tp3=(tp-1)*0.001;mp3=(ymax-yss)/yss; s=1001;whiley3(s)>1-dta&y3(s)<1+dta;s=s-1;end ts3=(s-1)*0.001 % [tr1tp1mp1ts1;tr2tp2mp2ts2;tr3tp3mp3ts3] % subplot(121),plot(T,y1,) 结果: Τ 上升时间/s 峰值时间/s 最大超调量/% 调整时间 0 0.2710 0.5310 0.9185 1.0000 0.125 0.2770 0.5320 0.8175 1.0000 0.25 0.2850 0.5340 0.7269 1.0000 2.分析系统的频率特性 (1)利用MATLAB绘制Nyquist图 其程序与曲线图像如下: nunG1=35; denG1=[10.3235]; [re,im]=nyquist(nunG1,denG1); % % plot(re,im); (2)利用MATLAB绘制Bode图 其程序与曲线图像如下: nunG1=35; denG1=[10.3235];; w=logspace(-2,3,100); % bode(nunG1,denG1,w); (3)利用MATLAB求系统的频域特征量 应用带输出函数的nyquist函数和bode函数,可以得到系统的实频特性、虚频特性、幅频特性,从而得到系统的频域特征量。 其程序与结果如下 numG1=35;denG1=[10.3235]; w=logspace(-1,3,100); % [Gm,Pm,w]=bode(numG1,denG1,w); % [Mr,k]=max(Gm); Mr=20*log10(Mr),Wr=w(k) % M0=20*log10(Gm (1)) % n=1;while20*log10(Gm(n))>=-3;n=n+1;end Wb=w(n) 结果 谐振峰值/dBMr=24.2916 峰值频率/s-Wr=5.9948 零频值/dBM0=0.0025 截止频率/s-1Wb=9.5455 (由于模型数据太过繁琐,后续采用书中例题的数据) 3分析系统的稳定性 其程序与结果如下: clear K=10;num1=4000*K; den=conv([10],[0.22002000]); [mag,phase,w]=bode(num1,den); figure (1); margin(mag,phase,w);holdon figure (2); sys1=tf(num1,den); sys=feedback(sys1,1); step(sys); [Gm1Pm1Wg1Wc1]=margin(num1,den); % K=40;num2=4000*K; [mag,phase,w]=bode(num2,den); figure(3); margin(mag,phase,w);holdon figure(4); sys2=tf(num2,den); sys=feedback(sys2,1); step(sys); [Gm2Pm2Wg2Wc2]=margin(mag,phase,w); % K=600;num3=4000*K; den=conv([10],[0.22002000]); [mag,phase,w]=bode(num3,den); figure(5); margin(mag,phase,w);holdon figure(6); sys3=tf(num3,den); sys=feedback(sys3,1); step(sys); [Gm3Pm3Wg3Wc3]=margin(num3,den); [20*log10(Gm1)Pm1Wg1Wc1]; [20*log10(Gm1)Pm2Wg2Wc2]; [20*log10(Gm1)Pm3Wg3Wc3]; [33.9794,38.1203,100.0,12.5437; 21.938,18.5503,100.000,27.5315] 四,矫正 绘制矫正后系统的Bode图,检验系统的相对裕度是否符合要求 程序: clear >>K=40;num2=4000*K; den=conv([10],[0.22002000]); [mag,phase,w]=bode(num2,den); figure(3); margin(mag,phase,w);holdon figure(4); sys2=tf(num2,den); sys=feedback(sys2,1); step(sys); [Gm2Pm2Wg2Wc2]=margin(mag,phase,w); % K=40; num2=4000*K;den=conv([10],[0.22002000]); % sys=tf(num2,den); [mag,phase,w]=bode(sys,w); gama=45;[mu,pu]=bode(sys,w); gam=gama*pi/180; alfa=(1-sin(gam))/(1+sin(gam)); adb=20*log10(mu);am=10*log10(alfa); ca=adb+am;wc=spline(adb,w,am); T=1/(wc*sqrt(alfa)); alfa=alfa*T; Gc=tf([T,1],[alfa,1]) Gc= 0.0554s+1 -------------- 0.009506s+1 Continuous-timetransferfunction. >>K=40;num3=4000*K;den1=conv([10],[0.22002000]); sys1=tf(num3,den1); num3=[0.0554,1];den3=[0.009506,1]; sys2=tf(num3,den3); sys=sys1*sys2; [mag,phase,w]=bode(sys); margin(mag,phase,w); 相对裕度=50.4695oC 幅值域度=27.1084dB相位裕度=55.1973oC 超前校正后系统的Bode图 系统矫正后,其相当裕度由18.5503o变为50.1973o,幅值裕度由矫正前的21.938dB变为27.1084dB.因此通过相位超前矫正环节后,可使系统性能满足设计要求。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- Matlab 作业
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《曹刿论战》知识点归纳与专项阅读.docx
《曹刿论战》知识点归纳与专项阅读.docx
-
《安塞腰鼓》教学实录doc.docx
-
《传统文化的继承》同步练习5人教版必修3.docx
-
《富兰克林自传》读后感15篇.docx
-
《老龄产业发展现状问题与对策研究》.docx
-
《企业安全生产台帐》word版.docx
-
《》教案.docx
-
《公共营养师》基础部分试题及答案.docx
-
《基金科目二》试题及答案解析6.docx
-
《建筑业企业资质等级标准》建建82号.docx
-
《苦夏冯骥才》阅读答案3.docx
-
《普通化学》.docx
-
《安全标准化二级年度自评工作首次会议议程范文》.docx
-
《观刈麦范文》.docx
-
《常用文体写作》题库与答案.docx
-
《阿房宫赋》鉴赏教学实录5篇.docx
-
《蝉》教案.docx
-
《妇女维权倡议书3篇》.docx
-
《健康评估》考试试题及答案 客观题一套.docx
-
《三毛流浪记》阅读试题.docx
-
《食用菌工厂化栽培实施方案》.docx
-
《铁路机车操作规程》63页word.docx
-
《信息系统安全系统等级保护基本要求》二级三级等级保护要求比较.docx
-
《中小学德育工作指南》解读.docx
-
7古代东方国家及古希腊古罗马的学前教育可编辑修改word版.docx
-
《对幼儿行为习惯养成教育的研究》之结题报告.docx
-
《工笔人物》课程教学大纲.docx
-
《彩色的梦》教案.docx
-
《红红楼梦》31回至40回故事梗概.docx
-
《看上去很美》观后感.docx
-
《汽轮机本体检修》高级工题库完整.docx
-
《别了司徒雷登》.docx
-
励志演讲稿八篇Word格式.docx
-
课文《落花生》第二课时教学设计范文(精选3篇)Word格式.docx
-
XX公司各部门绩效考核管理办法Word格式文档下载.doc
-
xx公司秋季趣味运动会方案Word文档格式.doc
-
xx公司手持电动工具安全使用管理制度Word下载.doc
-
xx公司营销中心企划部管理手册文档格式.doc
-
xx公司质量管理持续改进制度Word文件下载.doc
-
XX集团公司详细岗位说明书大全-总部企划部职位说明书Word文档下载推荐.doc
-
连锁经营管理学习心得Word文档格式.docx
-
孔融让梨读后感200字范文Word格式文档下载.docx
-
XX集团考核体系Word文件下载.doc
-
XX集团审计人员岗位职责Word文件下载.doc
-
xx酒店安全生产管理制度Word下载.doc
-
xx煤矿通防部内部管理办法(试行)Word文档下载推荐.doc
-
快乐大闯关缤纷社团日系列之游园会活动策划书社团活动策划书文档格式.docx
-
两小儿辩日教学设计文档格式.docx
-
XX小贷公司信贷业务操作流程暂行规定Word文件下载.doc
-
XX银行信息科技战略规划Word下载.doc
-
XX有限公司绩效考核体系-84页Word文档下载推荐.doc
