 采购货物一览表Word格式文档下载.docx
采购货物一览表Word格式文档下载.docx
- 文档编号:8271323
- 上传时间:2023-05-10
- 格式:DOCX
- 页数:45
- 大小:27.91KB
采购货物一览表Word格式文档下载.docx
《采购货物一览表Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《采购货物一览表Word格式文档下载.docx(45页珍藏版)》请在冰点文库上搜索。
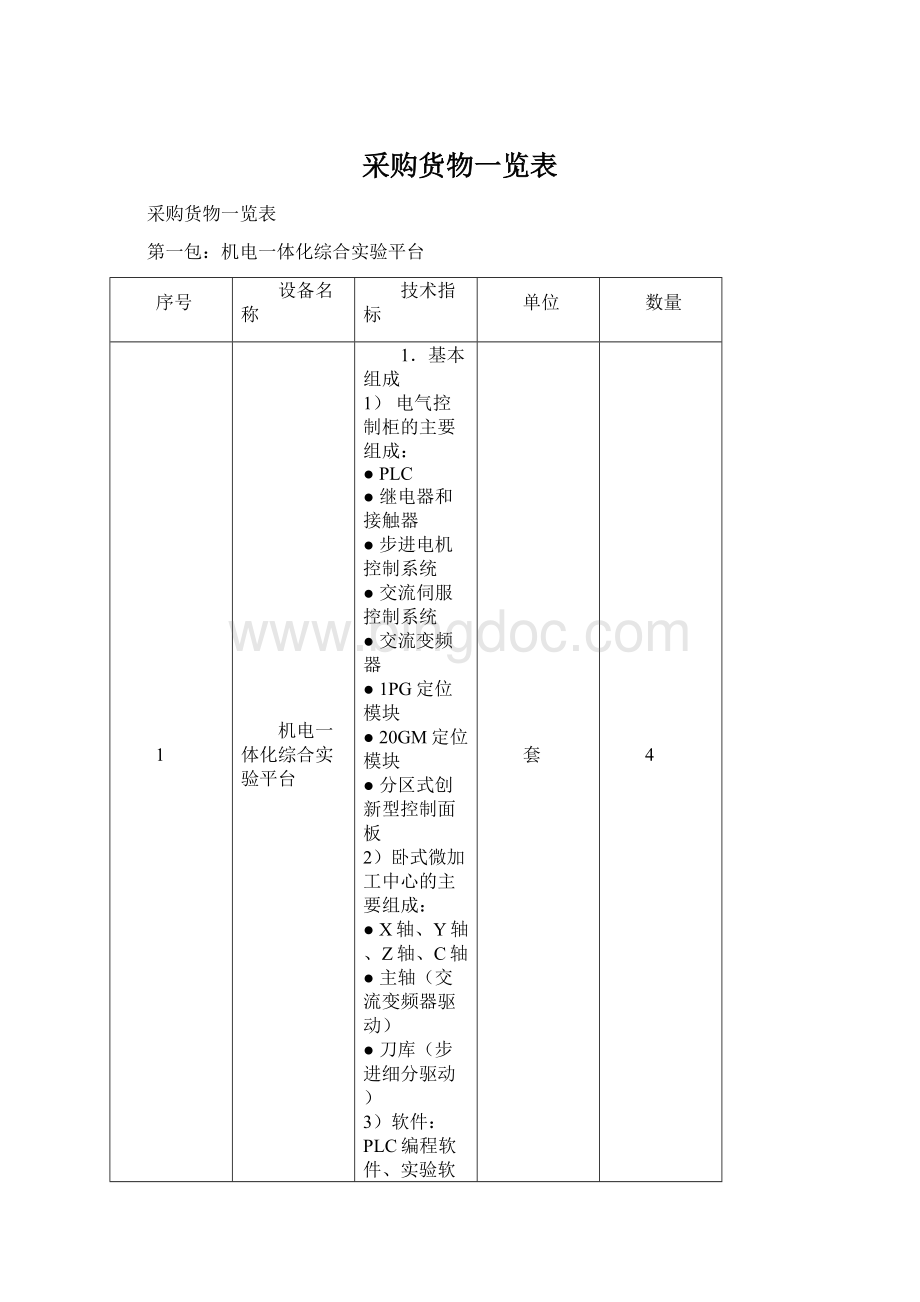
•PLC顺序控制程序设计与调试实验
•步进电机单轴定位控制实验
•步进电机基本动作参数设定及控制实验
•步进电机两轴联动控制实验(*)
•交流伺服电机单轴定位控制实验
•C轴(旋转工作台)控制实验
•PC与PLC双向通信程序设计与调试实验(*)
•PC与PLC两极控制程序设计与调试实验(*)
•液压系统的PLC控制实验(*)
•微加工中心选刀换刀实验(*)
•数控机床基本组成及功能部件的认识实验
•微加工中心的一般组成认识实验
•蜡模的定位钻孔加工实验(*)
•蜡模的平面轨迹铣削加工实验(*)
(特别说明:
上述打*标志的实验项目投标方必须满足)
套
4
2
自动化夹具综合实验台
由电气控制柜、夹具工作台及软件等部分组成。
1.设备的主要组成:
(1)夹具工作台的主要部分:
●六点定位平台及定位元件;
●电动夹具:
1)电动三爪自定心卡盘;
2)数控分度头;
3)数控回转工作台。
●液压夹具:
1)斜楔夹紧机构;
2)铰链夹紧机构;
3)联动夹紧机构。
●手动夹具:
1)偏心夹紧机构;
2)螺旋夹紧机构。
(2)电气控制柜的主要部分:
●可编程控制器;
●步进电机控制系统;
(3)软件:
控制软件及所有实验程序
工作台外形尺寸mm2050*800*1100
步进电机进给速度1—1200mm/min
步进电机快移速度1500mm/min
油泵电机370W,1400n/min
液压系统压力≤2.5Mpa
随机附件压力表:
1
•六点定位平台及定位元件实验(*)
•手动夹具实验(*)
•数控分度头控制实验(*)
•数控回转工作台控制实验(*)
•液压夹具控制实验(*)
•典型夹紧机构夹紧力及测量计算实验(*)
•电动三爪自定心卡盘控制实验(*)
•夹具综合实验(*)
•自动化夹具的现场教学实验
3
六自由度工业机器人本体
机器人特点:
•主要机构可拆装,便于教学实践;
•开放体系结构:
开放的机械、电气、控制、软件结构,便于二次开发和扩展;
•工业标准器件:
进口交流伺服电机,工业级滚珠丝杠、谐波减速机、同步带、复合滚珠丝杠及齿轮,工业级传感器和电气元件,运动控制器;
机器人设备特点:
•具有6自由度空间姿态,作业范围大,姿态灵活;
•驱动部分采用绝对式交流伺服电机,不需要机器每次启动都需要实现回零动作;
•采用高精度精密谐波减速机作为传动部件;
•采用工业铝合金铸造结构,重量轻;
•高速高精度:
速度可达1.5m/s;
重复定位精度:
±
0.1mm;
•系统采用PC+运动控制器,控制器为美国GALIL六轴嵌入式伺服控制卡,具有模拟量和脉冲量两种模式,模拟量用于动力学算法研究使用;
•机器人控制系统和计算机通过网线相连,便于实现局域网控制功能
•配有电控柜和相关配套电缆;
•配机器人底座和电磁手爪.
•标准工具安装接口
机器人能够完成的实验内容:
•机器人机械、电气、控制、软件结构的认知;
•机器人操作实习训练;
•机器人运动学问题研究;
•机器人动力学问题研究;
•机器人运动轨迹规划。
•并联机器人力矩控制模式研究;
•并联机器人奇异点动力学分析及优化控制;
•轮式机器人导航、避障和路径规划研究;
•机器人视觉技术及其在机器人系统中的应用;
•机器人仿真系统的研究;
•机器人远程网络控制;
台
机器人控制系统
软件配套:
WindowsGUI机器人软件,REVision机器视觉软件平台用于机器人视觉扩展平台,配套完善的实验指导书,可选配三维仿真实体模型软件用于机器人离线编程。
软件功能:
•采用window平台开发软件,具有示教/再现两种模式;
•运动指令要具有关节直线插补指令;
•要具有关节坐标系和直角坐标系;
•具有I/O输入和输出控制指令;
•具有逻辑判断指令;
机器人运动控制器:
控制轴数:
1-8轴,按照实际需要自由选择;
接口类型可以选择PCI,ISA,PC/104,VME,cPCI,USB,RS232和Ethernet,分布式网络控制;
封装形式:
总线型、独立型及控制盒封装、卡封装;
机器人运动控制器功能特点:
运动控制方式:
点位运动、JOG、直线/圆弧插补、仿型/示教、电子齿轮、龙门同步驱动、电子凸轮、螺旋线、正切跟随等;
双位置编码器反馈接口功能可以消除机械换向间隙及螺距误差,编码器反馈接口可以是数字量也可以是模拟量;
具备回零、限位、急停、高速锁存(0.1μs)事件触发接口之外,还提供通用数字I/O及高分辨率(12/16位)模拟输入接口;
提供与伺服、步进及液压马达的接口,用户可以进行任意组合使用
控制器本身具有应用程序、参数、变量、阵列元素存储功能,脱离主机亦能正常运行
机器人运动控制器性能指标:
采用32位高速处理器,每轴伺服更新率达62.5us;
伺服电机编码器反馈频率12MHz,步进电机脉冲输出频率3MHz;
先进的PID补偿控制器带速度前馈、加速度前馈、误差积分限、低通滤波器、陷波滤波器等;
16位DAC输出模拟指令(0~±
10V(用于伺服电机)、脉冲+方向(用于步进电机)、PWM输出(用于伺服放大器)、伺服使能输出;
位置计数范围:
32位(21.5亿计数单位(cts)/每次运动,自动更新),速度计数范围:
32位(12M计数单位(cts)/s);
多任务功能,可以同时执行8个应用程序;
•多机器人协调作业
5
气压系统试验台(补充设备)
实验设备具有插装性,可根据具体要求安装元件
主要技术参数:
气控延时阀,常闭
结构座阀,弹簧复位
压力范围0–800kPa(0–8bar)
600kPa(6bar)时控制压力300kPa(3bar)
额定流量1...290l/min
延时0.25–10s(可调)
2位5通换向阀,双气控
结构滑阀,直动式,双向
压力范围250–1000kPa(2.5–10bar)
额定流量1...2500l/min
额定流量1...4500l/min
600kPa(6bar)时响应时间5ms
完成实验内容
1、脉冲法消除障碍信号实验
2、阀法消除障碍信号实验
6
液压源及附件模块
1、液压系统通用技术参数:
液压接头NG4
液压介质粘度系数为22cST(mm2/s)的液压油
电器接口4mm安全插头和插座
工作电压24V直流
2、具体配置:
液压泵三通接头压力表压力传感器流量传感器温度传感器油管5路分液块,不带压力表FluidSIM中文版软件
3、具体要求:
液压泵单泵
泵结构双外齿轮液压泵
电机单向交流电
额定电压230V
额定电流0.65kW
频率50Hz
控制方式:
手动电源开关ON/OFF
额定转速下的输出流量2.2l/minat1320min-1
工作压力pmax6MPa(60bar)
油箱容积5l
工作周期50%
压力表
压力显示范围0–10MPa(0–100bar)
精度1.6%满量程
静态工作压力3/4满量程
动态工作压力2/3满量程
工作方式液压
三通接头
工作压力p6MPa(60bar)
最大压力pmax12MPa(120bar)
压力传感器
测量范围0–100bar
输出信号:
电压0–10V
流量传感器
测量范围0–10l/min与液压马达共用
输出信号:
温度传感器
测量范围0–100°
C
5-路液压分配接头,不带压力表
液压分配接头有5个P或T出口,可固定在铝合金底板上。
快插式油管600mm
内径6mm
工作压力p6MPa(60bar)
温度范围-40–+125°
C
最小弯曲度100mm
油管长度600mm
FluidSIM中文版软件
此软件可应用于多种领域:
作为教学或职业培训课程的备课工具;
作为课堂练习或自学系统;
作为控制技术设备改造的CAD系统。
此软件应通过硬件外置接口可对气动、液压、PLC、机电一体化设备进行控制和信号反馈。
完成实验
泵回路
控制缸的进给和返回
紧急停止回路
有级压力控制
压力、流量、温度特性曲线
7
液压基础模块
比例放大器2位4通电磁阀直控式溢流阀/顺序阀额定值信号给定单元比例溢流阀双作用液压缸,16/10/2003位4通比例阀压力过滤器液压马达节流阀单向节流阀
节流阀
额定流量9l/min
控制方式手动
单向节流阀
开启压力70kPa(0.7bar)
三通接头
最大压力pmax12MPa(120bar)
直控式溢流阀/顺序阀
调节方式手动
控制方式液压
双作用液压缸,
活塞直径16mm
活塞杆直径10mm,M8螺纹
行程200mm
最大压力pmax12MPa(120bar)
液压马达
安装形式卧式
等效容量8.2cm3
最大回油压力pRmax5MPa(50bar)
最大转速nmax1950min-1
传动轴Ø
16x28,A5x5DIN6885
最大压力pmax12MPa(120bar)
压力过滤器
液压连接NG6
最大压力pmax12MPa(120bar)
过滤精度5mm
比例放大器
设定值±
10V直流每步100mV
内部设定值开关信号15–30V直流
电磁输出PWM信号,24V,max.1A
使能信号15–30V直流
基准电流0–250mA,每步1mA
跳转电流0–250mA,每步1mA
最大电流100mA–1A,每步5mA
开关频率100–250Hz,每步1Hz
额定值信号源
设定点总数8
输出电压范围-10–+10Vtol.±
5mV(单步可调值0.1V)
斜率数
斜率时间常数0–10.0s/1V(单步可调值50ms/1V)
输入激励电压最小15V
输出频率1kHz
秒表输入1,测量时间0–100hrs
2位4通电磁阀
功率12W
控制方式电控
3位4通比例阀
阀结构阀心直控式
控制方式比例电磁铁,压力密封,压动
液压接口形式ISO/DIN4401size02
推荐过滤等级10µ
m
额定流量qN1.5l/min,atdpN=5bar/控制沿
额定电流680mA
完成实验
–比例放大器的工作原理(静态电流、最大电流、额定电流)
–比例压力阀的原理及其应用
–比例溢流阀的原理及其应用
–3位4通比例阀工作特性
第二包:
直线一级倒立摆等
规格
DSP教学实验系统
PC机(满足实验要求的主流机)
DSP实验箱:
●DSP主芯片模块
●通用仿真器(USB接口,支持C2000/VC33/C5000/C6000)
●通用实验控制面板(可选择2407、2812、VC33、VC5509、VC6713等主流DSP芯片开发板)
●数字信号源
软件:
●DSP开发环境软件
●实验配套例程(实验程序要求为C语言)
资料:
●DSP实验箱开发系统使用说明书
●实验教学指导书
●DSP开发板及实验开发板原理图
DSP主芯片模块TMS320LF2407A
通用仿真器支持CCS
通用实验控制面板提供交通灯、液晶显屏、步进电机、直流或交流电机等模块
数字信号源至少可产生方波、正弦波和方波
交流电源220AV,50HZ
随机附件1.电源线2.DSP开发软件
随机资料1.使用说明书;
2.实验指导书3.硬件原理图
配件2407、2812、VC33、VC5509、VC6713等主流DSP芯片开发板
3、实验项目:
CCS软件应用实验:
1)CCS开发环境的入门和演示实验;
(演示性实验)
2)简单工程文件的建立和调试。
(设计性实验)
基于DSP芯片的实验:
1)数字I/O控制的外设实验;
2)单路或多路ADC功能实验;
3)DSP定时器功能实验;
4)PWM输出实验。
DSP外部控制实验:
1)发光二极管显示控制实验;
2)直流电机控制实验;
3)步进电机控制实验。
直线一级倒立摆
实验设备特点
(1)开放性:
全开放性控制平台,学生可参与系统设计和应用开发;
(2)模块化:
被控对象模块化结构,可组成不同的机械结构,为创新实践实验提供方便;
(3)工业化:
工业级的标准零部件,确保系统稳定性,可靠性同时,通过实验掌握的知识技能,可直接应用于工业现场;
(4)系统性:
提供全面的教学资料、利于实验教学工作的开展。
主要技术参数
直线运动有效行程:
300mm
直线运动精度等级:
P4级(重复定位精度±
0.01mm)
交流伺服电机功率:
200W
角度检测精度:
500pules/rev
摆座高度:
400mm
采用滚珠丝杠、滚动导轨传动;
采用基于DSP嵌入式智能控制器,对实验摆进行起摆和平衡控制;
(1)基于工作台的时间响应实验
(2)基于工作台的频率响应实验
(3)直线一级倒立摆建模与仿真
(4)倒立摆Matlab实验控制软件
(5)PID控制器的设计与系统仿真
(6)一级倒立摆LQR控制器的设计
(7)典型输入激励下的时间响应
第三包:
基础实验平台
智能测试软件
具体配置:
1、DRVI可重组测试技术软件平台(全套实验脚本)
2、附属软件:
labview(教学版20端)
要求基于DRVI或Labview的软件平台的开放性及网络化功能,可以根据教学需要及发展不断扩展,并依照教学需求自己开发新的实验脚本及实验对象,扩充实验教学手段及方法;
充分发挥网络优势合理分配有限资源,实验时间实行动态管理。
要求本软件平台提供同Labview、MATLab等第三方软件的外接口,还配置扩展模块,用于学校自己扩充传感器及实验对象使用,须能将信号调理成标准的±
5V之间的电压信号,接入扩展模块的输入端口,输入到计算机中进行分析和处理。
具体组成:
数据采集仪、多路输出开关电源、2轴运动控制卡
1、USB数据采集仪
采集仪与PC机之间通过专用USB电缆连接,集软件加密、前端信号采集、信号激励输出、数字输入输出等功能于一体。
采集仪采用配套开关电源供电
提供8通道的模拟信号输入:
信号输入范围:
-5V~+5V电压信号
信号输入接口:
五芯航空插头接口;
自由采样模式、预触发采样模式
2通道的模拟信号输出:
信号输出范围:
信号输出接口:
标准BNC接口
16路数字输入:
TTL电平输入
16路数字驱动输出等功能,输出方式:
集电极开路输出;
最大输出电流:
0.5A
电源:
12V和+5V供电;
+5V电源波动范围不得超过±
2.5%
输入电流500mA:
12V电源波动范围不得超过±
2.5%,输入电流3A
输出精度:
12Bit分辨率,
最高400KHz采样频率。
2、多路输出开关电源
配套数据采集仪及传感器使用的直流开关电源,可为数据采集仪、传感器、实验台架等设备提供正常使用所需要的电源,同时也可为其它直流低压设备提供电源。
直流开关电源与数据采集仪之间通过专用的5芯电源线连接,与其它直流设备之间采样标准的接线端子。
直流开关电源提供输入、输出电压+5VDC、-5VDC、+12VDC、-12VDC电源。
3、2轴运动控制卡
62µ
sPID循环更新率
正交编码器或模拟反馈
2轴控制器,每轴可配置为步进或伺服控制器
混合运动特性文件
电子齿轮和2维/3维插值
8
转子台实验模块
转子台配套传感器
应变式力传感器加速度传感器光电转速传感器速度传感器磁电转速传感器变送器噪声传感器电涡流传感器
多功能转子台实验内容
1速度传感器振动测量实验2加速度传感器振动测量实验3电涡流传感器轴心轨迹测量实验4电涡流传感器轴位移测量实验5磁电传感器转速测量实验6光电传感器转速测量实验7力传感器标定及称重实验8转子现场动平衡实验9噪声测量实验
电涡流传感器
检测距离Sn:
1~15mm
工作距离Sr:
Sn×
80%
工作温度:
-25~+70℃
工作电压:
DC12V
响应频率:
200Hz
加速度传感器
-10~+75℃
DC5V
灵敏度:
3~4pc/ms2
极限加速度:
5000ms2
频率:
1~10000Hz
结构形式:
三角剪切
速度传感器
-29+80℃
200mv/cm/ms
线性度:
5%
频率范围:
20~1000Hz
测量方式:
绝对
光电转速传感器
检测距离:
0~10mm
-20~+50℃
500Hz
磁电转速传感器
探测距离:
0.5~2mm
20~10000Hz
变送器
-10~+60℃
测量范围:
0~10g
输出电压:
-5V~+5V
噪声传感器
-10~+50℃
工作距离:
0~3m
灵敏度(0dB=1V/Pa):
-50±
2dB
信噪比:
>
58dB
指向性:
单向
20~16KHz
环形输送线实验模块
包含环行输送线实验台和称重台
环形输送线传感器配置
应变式力传感器电涡流接近开关噪声传感器霍尔传感器红外反射式传感器颜色识别传感器红外对射式传感器
环行输送线实验内容
红外对射传感器运行速度测量实验颜色识别传感器物件颜色识别实验红外反射传感器产品计数实验霍尔传感器物件定位实验电涡流接近开关铁磁物体检测实验力传感器标定及称重实验
霍尔传感器
5mm
-25~+70℃
工作点:
22mT
释放点:
16.5Mt
应变式力传感器
0~2kg
安全超载:
150%
-20~+60℃
综合精度:
0.03Kg
重复性:
0.02%
红外反射式传感器
3m
-10~+55℃
输出电流:
3000mA
响应时间:
≤40ms
电涡流接近开关
1~8mm
红外对射式传感器
3cm


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 采购 货物 一览表
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《篮球行进间单手低手投篮》教学设计.docx
《篮球行进间单手低手投篮》教学设计.docx
-
《饲料添加剂管理条例》知识竞赛试题及答案要点.docx
-
4 物理届高三上学期第一次月考物理试题.docx
-
08第二学期研究生英语.docx
-
31氧气的性质与用途个案教学设计.docx
-
0225变电安规二次题库474道.docx
-
1992年大学英语四级.docx
-
Arts 专项练习.docx
-
《两只鸟蛋》说课稿.docx
-
《孙权劝学》选择阅读带答案.docx
-
《在操场上》教学反思.docx
-
4VMware FT容错原理与配置详解.docx
-
8套专升本艺术概论试题.docx
-
17秋学期《食品安全与日常饮食尔雅》在线作业2.docx
-
3500词汇40篇文章.docx
-
AST中央企业班组长岗位管理能力资格认证三期模拟10300009.docx
-
GMC大赛手册中文版.docx
-
JAVELIN智能球机.docx
-
P1口语重点题型素材更新版.docx
-
QMS质量管理体系审核员真题精选.docx
-
U2t2学教设计.docx
-
XX公路施工组织设计建议书.docx
-
XX省XX县治安拘留所工程建设项目可行性研究报告.docx
-
yy政治知识汇总架构.docx
-
安全生产违法行为行政处罚汇编.docx
-
百度网站的商业运营模式和盈利模式分析.docx
-
保险经营管理重点.docx
-
北极星群和山东群倾情奉献高考题解析5重庆卷.docx
-
《内科学》教学大纲.docx
-
《小学生数学报》全册苏教版六年级下.docx
-
5湖北省三类人员电工试题.docx
-
10食品经营过程与控制制度.docx
-
创意的海景房广告语_3篇(共5页)3100字.docx
-
幼师个性自我介绍范文(共3页)1300字.docx
-
教师工作计划高三(共7页)4300字.docx
-
灯具宣传广告词_3篇(共1页)600字.docx
-
德育工作总结范文_3篇(共19页)12800字.docx
-
精选5篇山东灵岩寺导游词_5篇(共16页)10800字.docx
-
重庆洋人街导游词(共3页)1300字.docx
-
主持人演讲比赛台词_3篇(共10页)6200字.docx
-
大二预备党员转正申请书_3篇(共9页)5600字.docx
-
园林专业毕业实习工作总结报告(共19页)12400字.docx
-
码头转租协议范本(共4页)2400字.docx
-
电话销售口号大全_1篇(共3页)1600字.docx
-
中学生上学期评语集锦(共9页)5600字.docx
-
茶楼收银的年终总结_3篇(共8页)4700字.docx
-
教师培训心得体会_3篇(共10页)6500字.docx
-
第二季度个人工作总结范文(共6页)3600字.docx
-
居住型房产广告文案_3篇(共3页)1500字.docx
-
重走长征路路线策划书_重走长征路活动方案(共6页)3400字.docx
-
增强看齐意识自觉践行讲话要求心得体会_4篇(共15页)10100字.docx
