 气液联动执行机构操作维护Word格式文档下载.docx
气液联动执行机构操作维护Word格式文档下载.docx
- 文档编号:8160213
- 上传时间:2023-05-10
- 格式:DOCX
- 页数:22
- 大小:310.75KB
气液联动执行机构操作维护Word格式文档下载.docx
《气液联动执行机构操作维护Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《气液联动执行机构操作维护Word格式文档下载.docx(22页珍藏版)》请在冰点文库上搜索。
●电子控制单元通过压力传感器检测管线中气体压力。
●电子控制单元通过ROCLINK判断检测压力是否正常。
●电子控制单元通过电磁阀控制气路的通断。
●当气路压力的变化导致液缸中气体压力发生变化。
●旋转叶片两端压差增大,使传动轴转动,带动阀门动作。
●
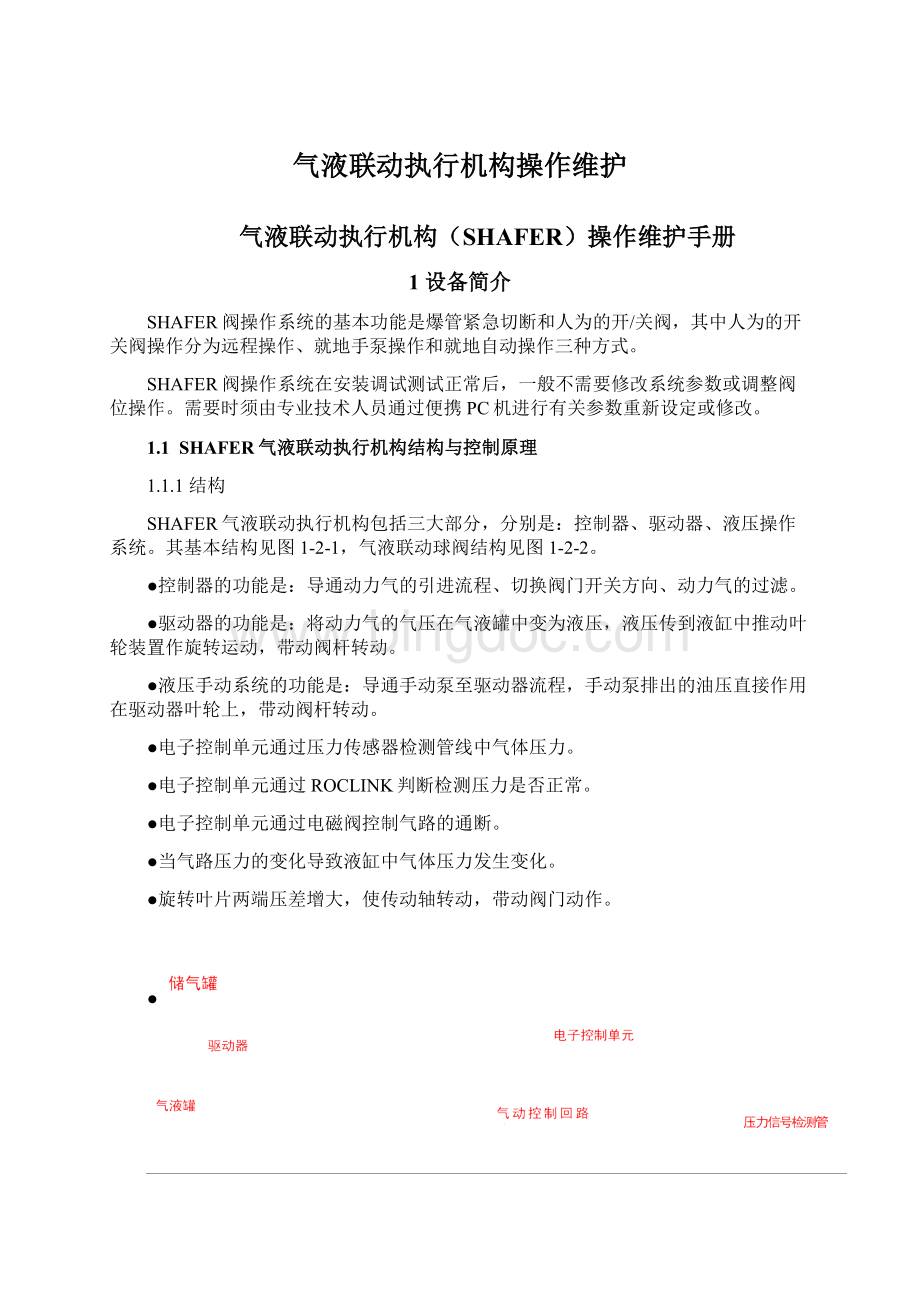
图1-2-1气液联动执行机构基本结构
图1-2-2气液联动球阀结构图
1.1.2控制原理
川气东送天然气管道工程南京支线气液联动执行机构共分四种类型,分别为:
●手动阀室所使用的气液联动执行机构
●过站干线所使用的气液联动执行机构
●站场进出站紧急关断阀ESDV所使用的气液联动执行机构
●站场紧急泄放阀BDV所使用的气液联动执行机构
1.1.2.1线路截断阀气液联动执行机构
手动阀室所使用的气液联动执行机构,其控制原理图见图1-2-3。
此气液联动执行机构具有就地控制,电子控制单元检测管线压力,自动关阀等功能。
图1-2-3控制原理图
(1)执行器
(2)气/液联动罐
(3)气/液联动罐
(4)手动液压泵
(5)速度调节孔板
(6)储气罐
(7)排液阀
(8)排气阀
(9)单向阀
(10)压力表
(11)梭阀模块
(12)过滤器
(13)先导过滤器
(14)活塞
(15)手柄
(16)动力梭阀
(17)截断阀
(18)两通路通常关闭的先导阀
(19)压力调节器
(20)电子式爆管保护控制系统
(21)安全放空阀
(22)太阳能板
(23)电池盒
(24)梭阀
本控制原理图是应用气/液联动系统操作阀门的旋转叶片执行器的原理图,动力气体是天然气。
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、两通路通常关闭的先导阀(18)、压力调节器(19)、安全放空阀(21)、一组电子式爆管保护控制系统(20)、太阳能板(22)。
a)电子式爆管保护功能(关阀)
在电子控制单元(20)中,带有压力传感器,通过管路与天然气主管线连接以获得压力信号。
当管线中的实际压力数据达到并超过电子控制单元中设定的三种压力参数中的任何一种时(高压关阀,低压开阀,压降速率关阀),并且此事件持续时间达到电子控制单元中设定的延时时间后,电子控制单元中的正常处于关闭状态的三通路电磁阀通电,并使气流流向正常处于关闭状态的二通路先导阀(18)。
由于“梭阀”模块(11,14,16)的信号与动力的比是33比1,这样二通路先导阀(18)打开后,“梭阀”打开,容许动力气体从动力接口到气缸中活塞接口(14),动力“梭子”(16)被打开,容许动力气流进入原来被气缸封闭住的空间,从而进入执行器关闭阀门的气/液联动罐(3),气流将进一步通过手动泵(4)和速度调节装置(5),从而进入旋转叶片执行器的本体,执行器在这个动力驱使下,运动直至关闭阀门。
当电子控制单元(20)中预先设定的电磁阀“待命”时间(10-255秒)完成时,此时电磁阀断电,信号气从通常关闭的二通路先导阀(18)排出。
当先导阀关闭时,引导气从“梭阀“模块(14)的孔板处排出,位于“梭阀”模块中负责关闭阀门功能的那一侧梭子关闭,致使负责关闭阀门的气/液联动罐(3)压力降低减压。
当气/液联动罐(3)压力降低全部完成,整个气/液联动系统重新回到初始的平衡状态。
b)就地手动操作开或关阀门和执行器
开阀:
拉开“梭阀”模块(11)上的开阀手柄(15),此机械式的手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活塞(14)封锁住的密闭空间,使得动力气体进入到负责开阀功能的气/液联动罐
(2),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全开的位置。
当阀门与执行器全部动作完成后,松开手柄(15),“梭阀”模块(11)将恢复到初始全封闭的位置,全部系统达到新的平衡状态。
关阀:
拉开“梭阀”模块(11)上的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活塞(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使旋转叶片执行器动作。
持续地拉住手柄(15)直到执行器
(1)驱动阀门达到全关的位置。
当阀门与执行器全部动作完成后,松开手柄(15)“梭阀”模块(11)将恢复到初始全封闭的位置,系统达到新的平衡状态。
c)就地手动泵开/关阀门和执行器
无论想开或关阀,最简单的就是用一个手柄装在执行器控制箱内的手动泵(4)的接口上,使用这个手柄上下压动,将力推向泵的中部。
(注:
泵的标记将指明开或关阀的动作方向。
)
使用供货时提供的手动泵手柄,向上抬举这个手柄时,手动泵的插销提起,使得液压油进入手动泵,再向下推压手柄,给液压油加压,使得液压油进入执行器。
重复上抬、下压手柄的动作,直至开或关阀的过程全部完成。
泵被泄压并回到初始状态,此时任何自动控制这个执行器的功能可以被使用。
1.1.2.2越站干线使用的气液联动执行机构
过站干线所使用的气液联动执行机构,其控制原理图见图1-2-4。
此气液联动执行机构具有就地控制,远程开关控制,ESD紧急关断控制,电子控制单元检测管线压力,自动关阀控制,ESD及电子控制单元关阀后的手动复位控制等功能,另外本控制原理图1-2-4也能够保证电子控制单元关阀及ESD关阀具有最高的优先级。
图1-2-4控制原理图
(16)梭阀
(22)三通路通常开启的先导阀
(23)三通路通常关闭的先导阀带有锁定功能
(25)隔离阀
(26)梭阀
(27)电磁阀
(28)电磁阀
(29)梭阀
(30)电磁阀
(31)限位阀
(32)就地操作装置
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、两通路通常关闭的先导阀(18)、压力调节器(19)、安全放空阀(21)、一组电子式爆管保护控制系统(20)、三通路通常开启的先导阀(22)和一个三通路通常关闭的先导阀带有锁定功能(23)等31项内容,具体见图1-2-4。
本流程图具有如下操作功能:
当管线中的实际压力数据达到并超过电子控制单元中设定的三种压力参数中的任何一种时(高压关阀,低压关阀,压降速率关阀),并且此事件持续时间达到电子控制单元中设定的延时时间后,电子控制单元中的正常处于关闭状态的电磁阀通电,并使气流流向正常处于关闭状态的先导阀(18)。
由于“梭阀”模块(11,14,16)的信号与动力的比是33比1,这样先导阀(18)打开后,“梭阀”打开,容许动力气体从动力接口到气缸中活塞接口(14),动力“梭子”(16)被打开,容许动力气流进入原来被气缸封闭住的空间,从而进入执行器关闭阀门的气/液联动罐(3),气流将进一步通过手动泵(4)和速度调节装置(5),从而进入旋转叶片执行器的本体,执行器在这个动力驱使下,运动直至关闭阀门。
当电子控制单元(20)中预先设定的电磁阀“待命”时间(10-255秒)完成时,此时电磁阀断电。
b)锁定功能(防止开阀)
当上述的的电子式爆管保护系统工作的时候,气流同时通过带有锁定功能的先导阀(23)。
此先导打开使得正常情况开启的先导阀(22)关闭,当有爆管关阀命令执行后,旋转叶片执行器将使阀门继续处于关闭的状态和位置。
这个具有锁定功能的正常关闭的先导阀(23)连续不断地提供了恒定的信号压力给另一个正常开启的先导阀(22),从而防止了通过这个控制回路去驱动旋转叶片执行器动作进而打开阀门。
这个锁定功能的解锁,只有通过人工进行手动复位操作,使正常开启的先导阀(22)泄放压力直至重新恢复正常开启的状态。
c)二通路电遥控(开或关阀)
开阀:
当阀门处于关闭状态的位置,给正常关闭状态的电磁阀(28)带电,该阀打开,动力气体通过动力接口进入“梭阀”模块(11)中信号气缸的活塞(14)。
“梭阀”(16)打开,动力气进入原来被“梭阀”和气缸封锁住的空间,同时进入负责开阀功能的气/液联动罐
(2),动力气体驱动液压油经过手动泵(4)和速度调节孔板(5),进入了旋转叶片执行器
(1)内,直至执行器驱动阀门到全开的位置。
当阀门全开后,正常关闭的电磁阀(28)在执行器完成全部动作后断电,系统重新回到平衡的位置。
关阀:
当阀门处于开启状态的位置,给正常关闭状态的电磁阀(27)带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(11)中的信号活塞(14),动力气进入到原来被“梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)。
动力气体驱动液压油经过手动泵(4),速度调节孔板(5)进入了旋转叶片执行器内,直至执行器驱动阀门到全关位置。
当阀门全关后,负责关闭功能的正常关闭的电磁阀(27),在执行器完成全部动作后断电。
系统重新回到平衡的位置。
d)就地手动操作开或关阀门和执行器
e)就地手动泵开/关阀门和执行器
f)站控系统ESD控制(站控系统对气液联动系统常供电,断电关阀)
正常情况下,站控系统给常开电磁阀(30)常带电,一旦站控系统断掉此电磁阀的电源,先导阀(18)导通动力气,驱动阀门关闭,另外,ESD关阀同时,会触发先导阀(22)切断开阀控制气路,保证在接到ESD关阀命令的同时,即使接到开阀命令也不会执行开阀操作,保证ESD关阀操作具有最高优先级。
1.1.2.3站场进出站使用的气液联动执行机构
站场进出站紧急关断阀ESDV所使用的气液联动执行机构,其控制原理图见图1-2-5。
此气液联动执行机构具有就地控制,远程开关控制,ESD紧急关断控制及ESD关阀后的手动复位等功能,另外本控制原理图1-2-5也能够保证ESD关阀具有最高的优先级。
图1-2-5控制原理图
(17)电磁阀
(18)电磁阀
(19)截断阀
(20)电磁阀
(21)限位阀
(22)就地操作装置
(23)叶片
(24)压力调节器
(25)安全放空阀
(27)先导阀
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、压力调节器(24)、安全放空阀(25)、先导阀(27)和常闭带有锁定功能的电磁阀(20)等27项内容,具体见图3-5。
本控制原理图具有如下操作模式:
a)锁定功能(防止误操作)
通常情况下电磁阀(20)导通,使控制气路到达先导阀(27)的上端,从而先导阀(27)导通,一旦电磁阀断电,控制气被泄放掉,开气路被切断,同时,(20)被锁定,阀门关闭,需要给(20)复位,才能重新打开阀门。
b)二通路电遥控(开或关阀)
-开阀:
当阀门处于关闭状态的位置,给常闭状态的电磁阀(18)带电,该阀打开,动力气体通过动力接口进入“梭阀”模块(11)中信号气缸的活塞(14)。
当阀门全开后,正常关闭的电磁阀(18)在执行器完成全部动作后断电,系统重新回到平衡的位置。
-关阀:
当阀门处于开启状态的位置,给常闭状态的电磁阀(17)带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(11)中的信号活塞(14),动力气进入到原来被“梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)。
当阀门全关后,负责关闭功能的正常关闭的电磁阀(17),在执行器完成全部动作后断电。
c)就地手动操作开或关阀门和执行器
拉开“梭阀”模块(11)上的关阀手柄(15),手柄直接将力作用在动力梭阀(16)上,使其动作打开原来被“梭阀”(16)和动力气缸活塞(14)封锁住的密闭空间,使得动力气体进入到负责关阀功能的气/液联动罐(3),动力气驱动液压油使旋转叶片执行器动作。
d)就地手动泵开/关阀门和执行器
e)站控系统ESD紧急关阀控制(站控系统对ESD电磁阀常供电,断电关阀)
正常情况下,站控系统给常开电磁阀(20)常带电,一旦站控系统断掉此电磁阀的电源,动力气将通过限位阀(21),驱动阀门关闭,另外,ESD关阀同时,会触发先导阀(27)切断开阀控制气路,保证在接到ESD关阀命令的同时,即使接到开阀命令也不会执行开阀操作,保证ESD关阀操作具有最高优先级。
1.1.2.4紧急泄放阀气液联动执行机构
站场紧急泄放阀BDV所使用的气液联动执行机构,其控制原理图见图1-2-6。
此气液联动执行机构具有就地控制,远程开关控制,紧急开(放空)控制,紧急放空后的手动复位控制等功能,另外本控制原理图3-6也能够保证紧急放空具有最高的优先级。
图1-2-6控制原理图
(20)带有锁定功能的常关电磁阀
在整个回路中包括阀门执行器
(1)、一套气/液联动罐
(2)和(3)、手动液压泵(4)、开关一个冲程的储气罐(6)、“梭阀”控制模块(11)、压力调节器(24)、安全放空阀(25)、常开的先导阀(27)和一个带有锁定功能的常关电磁阀(20)等27项内容,具体内容见控制原理图1-2-6。
本流程图具有如下操作模式:
✧锁定功能(需现场手动复位后才能重新关阀)
✧远程遥控功能(开/关阀)
✧就地气动手柄操作(开/关阀)
✧就地手动泵操作(开/关阀)
✧站控系统紧急开(放空)控制(站控系统对用于紧急放空的电磁阀常供电,断电开阀放空)
a)锁定功能(防止误操作)
通常情况下电磁阀(20)导通,使控制气路到达先导阀(27)的上端,从而先导阀(27)导通,一旦电磁阀断电,控制气被泄放掉,关气路被切断,同时,(20)被锁定,如需再次关闭阀门,需要给(20)复位,才能重新关阀。
b)二通路电遥控(开或关阀)
当阀门处于关闭状态的位置,给正常关闭状态的电磁阀(18)带电,该阀打开,动力气体通过动力接口进入“梭阀”模块(11)中信号气缸的活塞(14)。
当阀门全开后,二通路正常关闭的电磁阀(18)在执行器完成全部动作后断电,系统重新回到平衡的位置。
当阀门处于开启状态的位置,给正常关闭状态的电磁阀(17)带电,该阀打开,动力气体通过动力接口到它的气缸接口,经过梭阀(26)作用到梭阀模块(11)中的信号活塞(14),动力气进入到原来被“梭阀”(16)和气缸封锁住的空间,进入到负责关阀功能的气/液联动罐(3)。
当阀门全关后,负责关闭功能的二通路正常关闭的电磁阀(17),在执行器完成全部动作后断电。
c)就地手动操作开或关阀门和执行器
d)就地手动泵开/关阀门和执行器
e)站控系统紧急开阀(放空)控制(站控系统对用于紧急放空的电磁阀常供电,断电开阀)
正常情况下,站控系统给常开电磁阀(20)常带电,一旦站控系统断掉此电磁阀的电源,动力气将通过限位阀(21),驱动阀门打开,另外,开阀同时,会触发先导阀(27)切断关阀控制气路,保证在接到紧急开阀命令的同时,即使接到关阀命令也不会执行关阀操作,保证紧急放空操作具有最高优先级。
检修、测试、维护、保养
3.1检修与维护
3.1.1执行器排空
在正常情况下,旋转叶片执行


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 联动 执行机构 操作 维护
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《安全在我心中生命在我手中》主题班会教案.docx
《安全在我心中生命在我手中》主题班会教案.docx
-
《传热学》第五版名词解释总结沈阳建筑大学09级考试重点.docx
-
《3S技术基础》复习题综合.docx
-
《财务管理》各章复习思考题和有有关计算题.docx
-
《地下防水工程质量验收规范》GB.docx
-
《企业文化》考试.docx
-
《通风与空调工程施工质量验收规范》GB50243.docx
-
《短文两篇》备课笔记.docx
-
《管理会计》模拟考试题电子教案.docx
-
《花鼓》教学设计.docx
-
《旅游政策与法规》复习思考题.docx
-
《诺曼底号遇难记》第二课时教学设计教案教学设计.docx
-
《管理学基础》配伍题库.docx
-
《泡沫经济对金融危机的影响》.docx
-
《套圈游戏》教学反思.docx
-
《我们的祖国》教案.docx
-
《学习雷锋精神》演讲稿7篇.docx
-
《艺术设计概论》复习题.docx
-
2施工管理重点和难点分析.docx
-
9板框压滤机技术协议书.docx
-
18小稻秧脱险记教学设计381.docx
-
82液压2基础题.docx
-
400接线员岗位职责.docx
-
《病历书写基本规范》考试题及答案A卷.docx
-
《发展心理学》测验试题.docx
-
《测量管理体系认证技术标准》.docx
-
《健康教育宣传方案优秀范文5篇》.docx
-
《8纠正措施》.docx
-
《从罗丹得到的启示》的教案设计修改版.docx
-
《老王》优质课教学设计部编人教版七年级下册.docx
-
《概率论与数理统计》课后习题解答.docx
-
《财务管理学》第三版复习提纲内容教材.docx
-
装饰名词解释.docx
-
最新版卫生监督执法文书.docx
-
最新材料见证取样规范标准详.docx
-
最新儿童学习数学.docx
-
最新湖北大学考研分数线对比考研难度.docx
-
最新蜗轮传动不锈钢法兰式固定球阀上海博球防腐阀门厂.docx
 秘书部应用写作培训.pptx
秘书部应用写作培训.pptx
-
秘书处总结汇报ppt.pptx
-
秘书处培训课件(XXXX8).pptx
-
秘书学--文秘与办公自动化专业(PPT137).pptx
-
秘书的xinli第四章第三节.pptx
-
秘书学演示文稿4.pptx
-
秘书学——秘书工作内容.pptx
-
秘书仪容修饰.pptx
-
秘书学习档案1.pptx
-
秘书工作培训教材(XXXX-06-09171356).pptx
-
秘书学与秘书实务.pptx
-
秘书与领导的关系.pptx
-
秘书沟通协调的基本原则与要求.pptx
