 哈尔滨工业大学《控制原理》考研试题与答案Word下载.docx
哈尔滨工业大学《控制原理》考研试题与答案Word下载.docx
- 文档编号:7745101
- 上传时间:2023-05-09
- 格式:DOCX
- 页数:13
- 大小:417.99KB
哈尔滨工业大学《控制原理》考研试题与答案Word下载.docx
《哈尔滨工业大学《控制原理》考研试题与答案Word下载.docx》由会员分享,可在线阅读,更多相关《哈尔滨工业大学《控制原理》考研试题与答案Word下载.docx(13页珍藏版)》请在冰点文库上搜索。
住siJ3/)
232
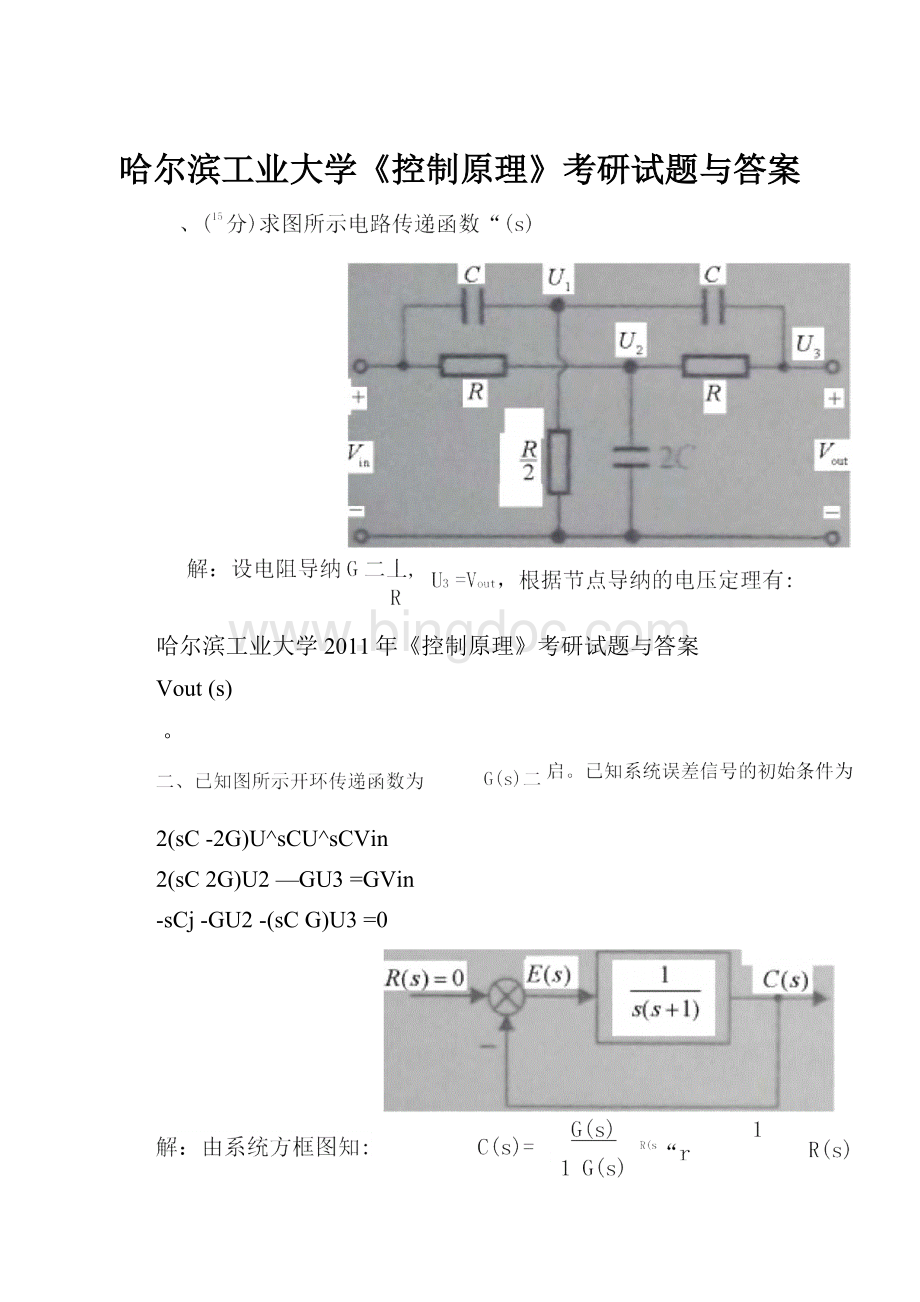
三、(15分)设单位负馈开环传递函数为G(s)二丄,试求闭环系统在输入信号r(t)二
s+1
sin(t・30J—2cos(2t—45:
)作用下稳态误差的解析表达式。
解:
对于输入信号,有:
r(t)=sin(t・30J・2sin(2t45)
由开环传递函数得到误差传递函数为:
;
r(s)=L
s+2
乙_^_1
则有:
|电卫国)|=”专呼,N<
L(jco)=arctan^—arctan:
当,1rad/s,er(j1)=罟,zlr(j1^18.4;
当.=2rad/s,,2)
Zlr(j2)=184。
因此,在输入信号下的稳态误差为:
■1010
essr(t)sin(t30184)2sin(2t4518.4)
54
=-10sin(t48.4)冷0sin(2t63.4)
15分)给定系统如图所示,其中N(s)表干扰信号,R(s)表示输入信旦
输出信号。
(1)画闭环根轨迹的大致图形,标出渐进线、出射角、入射角;
(上的交点,确定使闭环系统稳定的参数K的取值范围,并用劳氏判进行检验。
入3
四、
号。
恥)、
—-*oc
V_jpi
■号,
2)
_10
=~4,
C(s)表示
根据虚轴
C⑸
(1)由题意,开环传递函数为:
K(s2+2s+2)
G(s)3
s
闭环特征方程为:
D(s^s3Ks22Ks•2K=0
1)传递函数的开环极点和开环零点个数分别为n=3,m=2,n-m=1,有1条渐近线。
2
2)令s2s2=0,可得Z1,2=-1_j,pi,2,3=0,则根轨迹在实轴上分布于(-:
:
,0]。
Vp一Wz
3)渐近线与实轴交点:
G-^2,渐近线为实轴。
n-m
4)分离点和汇合点d[G(s)H(s)]=0。
令'
丄——〔J。
,可得恥=0,
dsJG(S)丿lf+2s+2丿
龟4--1-2j。
6)出射角和入射角:
p二180(211)—C吊八耳),z二180:
(211)—('
石-7和)
代入可得出射角为45°
,入射角为135。
由此画出根轨迹如图所示,
RootLn-tus
(2)根轨迹与虚轴的交点,用代入法求,将s二j•代入特征方程,可得:
22
D(j•)=(2K—K•)(2K—•)j=0
可得:
-.2,
K=1
由根轨迹可知系统当
K>
1时稳定。
根据劳斯稳定判据,
列劳斯阵列如下:
3s
1
2K
2s
K
s2K-2
s0
为使系统稳定,劳斯阵列的第一行的元素要全部大于零,即系统当K>
联校正装置,使得系统满足下列指标:
(1)跟踪单位斜坡输入信号时的稳态误差为0.01;
(2)开环剪切频率为0.6rad/sw•W1rad/s;
(3)开环相角裕度>
40;
。
要求写出校正装置
的传递函数,并检验设计结果是否满足上述指标。
由Kv=100可得G(s)的伯德图,如图所示。
s(s+1)(0.02s+1)
G
GainMarginip日):
-5.B5
Atfr*qlyad•skJ:
7.07
ClaudLoopSablt?
No
由图可以看出闭环系统是不稳定的。
要想在■.c=0.8rad/s处穿越,将Wj代入G(S),得:
G(j0.8)=_0.3264j0.39488
需要补充的幅值为39.78dB,同时在该处相角裕度满足条件。
迟后校正,-
下移的幅值为m二39・78dB二20lg—,解得:
〉二0・0103a
又专咗,得:
J213*5,GW碟詁
校正后伯德图如图所示。
T2>
0。
回答下列问题:
(1)画出开环频率特性Nyquist曲线的概略图形;
(2)根据Nyquist判据确定使闭环系统临界稳定的参数TpT2应该满足的条件。
(1)根据系统的开环传递函数可以得到:
©
T1T2
+30
AC)
-He
T1T2
(■)
90:
-180:
-270
由此画出Nyquist曲线的概略图形如图所示。
令=「180;
求得--
,则:
__+Im
五兀[g]
MTZ
"
丄、I,zz丄z丨0.368z+0.264
=(1-z)2…1~2
|L(z-1)2z-1z-ez2-1.368z0.368
0.368z0.264
z-z0.632
C(z)吕(z)R(z)
0.368z」0.264z^
运用长除法,得:
则可得:
1-2z」-1.632z,-0.632z;
12345
C(z)=0.368z1.00z1.40z1.40z1.147z
C(0)=0,C(T)=0.368,C(2T)=1.00
C(3T)=1.40,C(4T)=1.40,C(5T)=1.147
kTW5T时的响应曲线为如图所示。
八、(15分)设当图所示系统的初始条件分别为:
(1)e(0)=_0.5,e(0)--0.1;
(2)
e(0)=5,e(0)=0时,在e-e平面上绘制相轨迹图,并根据所得的相轨迹图对系统的性能进行讨论。
根据题图,可得:
u(t)」,[e(t)1;
或丫)「且心。
曰,当e(t)v—1;
或e(t)<
1且e(t)>
0e(t)--c(t),u(t)"
(t)C(t)
e'
e1,当e>
「1且e<
0;
或e>
1(i区)
e•e=1,当e<
1且e>
或e<
-1(n区)
183!
g血1
a
■■
由此可得:
i区:
e•e=-1,无奇点,渐近线为e=-1,等倾线
e
n区:
同I区。
由此绘制相轨迹图如图所示。
如图所示,无论初态在何处,相轨迹最终都要收敛,因此,系统是稳定的。
九、(15分)已知系统的传递函数矩阵为G(s:
土
s3,试求系统的能
观规范形的实现。
根据已知条件,有:
G(s^C(s|-1)1B^_s11
1'
+D
则可得:
D=0
将C(sl-1)丄B写成按s的降幕排列格式:
「丄]
s+1
C(sI-1)1口
(s1)(s2)(s3)
Rs+2)(s+3)]
(s+1)(s+3)
](s+1)(s+2)一
22+5s+61
2s+4s+3
s+3s+2
讣1■
1i,a=41,a=3
jJId
系统为3输入1输出,因此得到系统的能观规范形的实现为:
0m0m-a01mI
A0=1m0m—a11m
卫m1m"
^21m_
B。
=b0b1b2T=1115
C0=0m0m1m
十、(15分)已知XJ01*0
|lp-5|[100
X2不可测量,试设计一个降维的状态观测器,使降维观测器的极点为
测器动态方程,并写出状态
s36s211s6
a0=6,at=11,a2=6,b0
对于不可观测部分,
,其中,
Im
_1
【°
Ol0
2T
,y-10lx,其中
k=X1。
若系统状态为
/2
-10,要求写出降维观
X2的估计方程。
X2二-5x2100u
.y0=X1=X2
-10,则(A22-LA12)的特征根为-10,
其状态方程为:
为使降维观测器极点为
将其代入X2=(A22-LA!
2)XL(V-A』-Be)(A21y珈),可得:
切--10x25y°
100u--10x25y100u
令w-5y,则?
2=w5y,2=W5*,即:
W二…10w-50y100u(降维观测器的动态方程)=w5y(降维观测器的估计方程)
降维状态观测器的系统结构图如图所示。
解得:
L=-5


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制原理 哈尔滨工业大学 控制 原理 考研 试题 答案
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《安全在我心中生命在我手中》主题班会教案.docx
《安全在我心中生命在我手中》主题班会教案.docx
-
《传热学》第五版名词解释总结沈阳建筑大学09级考试重点.docx
-
《3S技术基础》复习题综合.docx
-
《财务管理》各章复习思考题和有有关计算题.docx
-
《地下防水工程质量验收规范》GB.docx
-
《企业文化》考试.docx
-
《通风与空调工程施工质量验收规范》GB50243.docx
-
《短文两篇》备课笔记.docx
-
《管理会计》模拟考试题电子教案.docx
-
《花鼓》教学设计.docx
-
《旅游政策与法规》复习思考题.docx
-
《诺曼底号遇难记》第二课时教学设计教案教学设计.docx
-
《管理学基础》配伍题库.docx
-
《泡沫经济对金融危机的影响》.docx
-
《套圈游戏》教学反思.docx
-
《我们的祖国》教案.docx
-
《学习雷锋精神》演讲稿7篇.docx
-
《艺术设计概论》复习题.docx
-
2施工管理重点和难点分析.docx
-
9板框压滤机技术协议书.docx
-
18小稻秧脱险记教学设计381.docx
-
82液压2基础题.docx
-
400接线员岗位职责.docx
-
《病历书写基本规范》考试题及答案A卷.docx
-
《发展心理学》测验试题.docx
-
《测量管理体系认证技术标准》.docx
-
《健康教育宣传方案优秀范文5篇》.docx
-
《8纠正措施》.docx
-
《从罗丹得到的启示》的教案设计修改版.docx
-
《老王》优质课教学设计部编人教版七年级下册.docx
-
《概率论与数理统计》课后习题解答.docx
-
《财务管理学》第三版复习提纲内容教材.docx
-
2023办公室主任年终个人工作总结.doc
-
2023包村扶贫工作总结3篇.doc
-
2023创建和谐演讲稿(4篇).doc
-
2023创卫活动方案.doc
-
2023关于读书交流的心得体会.docx
-
2023关于团小组会议记录范文.docx
-
2023化妆品三八节促销活动部署方案3篇.docx
-
2023决胜脱贫攻坚工作总结.doc
-
2023劳模先进事迹.doc
-
2023内科工作总结.doc
-
2023内科总结(三).doc
-
2023农村村规民约范文3篇.doc
-
2023农村低保申请范文3篇.doc
-
2023农村扶贫年终工作总结范文.doc
-
2023农村合作医疗调查报告范文(二).doc
-
2023农村计生专干述职报告范文3篇.doc
-
2023农村剩余劳动力外出务工的调研报告.doc
-
2023农业产业化调研报告.doc
-
2023刑侦大队领导述职述廉报告.doc
