 第8章 图象的检测及模板匹配文档格式.docx
第8章 图象的检测及模板匹配文档格式.docx
- 文档编号:7284458
- 上传时间:2023-05-08
- 格式:DOCX
- 页数:12
- 大小:41.73KB
第8章 图象的检测及模板匹配文档格式.docx
《第8章 图象的检测及模板匹配文档格式.docx》由会员分享,可在线阅读,更多相关《第8章 图象的检测及模板匹配文档格式.docx(12页珍藏版)》请在冰点文库上搜索。
算法共有三个:
投影法、差影法和模板匹配。
8.1投影法
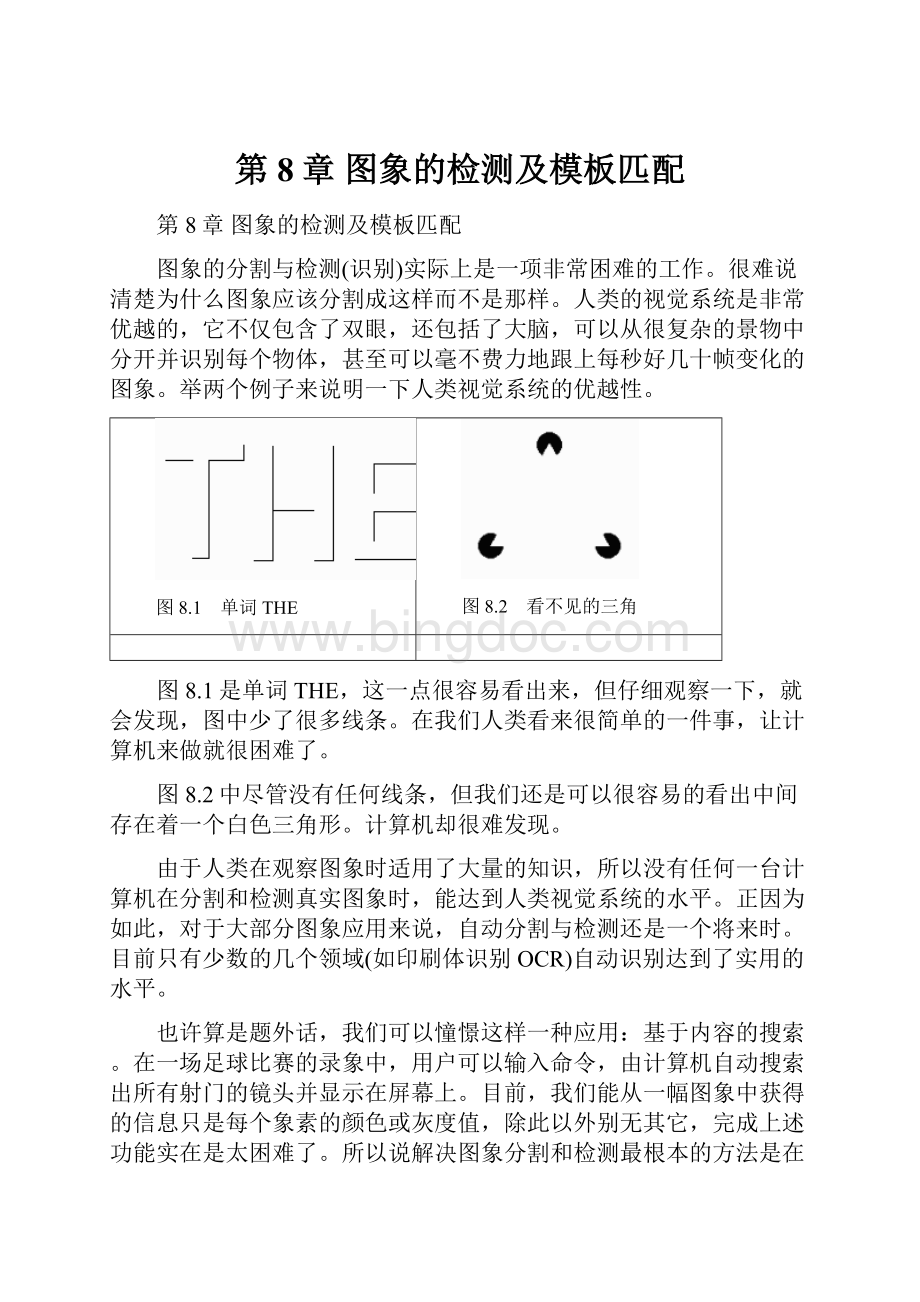
在介绍投影法之前,我先出一道题目,下面的这幅照片是著名的华盛顿纪念碑(我记得在“阿甘正传”中曾经看到过它),怎样从图中自动检测到水平方向上纪念碑的位置。
仔细观察,不难发现,纪念碑上象素的灰度都差不多而且与众不同,如果我们选取合适的阈值,做削波处理(这里选175到220),将该图二值化,如图8.3所示:
图8.3
华盛顿纪念碑
图8.4
削波处理,将图8.3二值化
由于纪念碑所在的那几列的白色点比起其他列多很多,如果把该图在垂直方向做投影,如图8.5所示。
图8.5
图8.4做垂直方向投影
其中,黑色线条的高度代表了该列上白色点的个数。
图中间的高峰部分就是我们要找的水平方向上纪念碑所在的位置,这就是投影法。
可以看出投影法是一种很自然的想法,有点象灰度直方图。
为了得到更好的效果,投影法经常和阈值化一起使用。
由于噪声点对投影有一定的影响,所以处理前最好先做一次平滑,去除噪声。
以下是投影法的源程序,第二个参数是个BOOL变量,为真时表示在水平方向上做投影,否则在垂直方向上做投影。
要注意的是,我们针对的虽然是二值图,但为了处理的方便,用的是256级灰度图,不过只用到了0和255两种灰度级。
BOOLProjection(HWNDhWnd,BOOLHori)
{
DWORD
OffBits,BufSize;
LPBITMAPINFOHEADER
lpImgData;
LPSTR
lpPtr;
HLOCAL
hTempImgData;
LPBITMAPINFOHEADER
lpTempImgData;
LPSTR
lpTempPtr;
HDC
hDc;
HFILE
hf;
LONG
x,y;
int
num;
//用的是256级灰度图,不过只用到了0和255两种灰度级。
if(NumColors!
=256){
MessageBox(hWnd,"
Mustbeamonobitmapwithgrayscalepalette!
"
ErrorMessage"
MB_OK|MB_ICONEXCLAMATION);
returnFALSE;
}
//到位图数据的偏移值
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为新图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
Errorallocmemory!
"
MB_OK|MB_ICONEXCLAMATION);
returnFALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//新图缓冲区初始化为255
memset(lpTempImgData,(BYTE)255,BufSize);
//拷贝头信息
memcpy(lpTempImgData,lpImgData,OffBits);
if(Hori)
{
//水平投影
for(y=0;
y<
bi.biHeight;
y++){
lpPtr=(char*)lpImgData+(BufSize-LineBytes-y*LineBytes);
num=0;
//计数器初始化为0
for(x=0;
x<
bi.biWidth;
x++)
if(*(lpPtr++)!
=0)//是白点
num++;
//计数器加1
lpTempPtr=(char*)lpTempImgData+(BufSize-LineBytes-y*LineBytes);
num;
*(lpTempPtr++)=0;
//在新图中,该行中共有num个黑点
else{//垂直投影
x++){
lpPtr=(char*)lpImgData+(BufSize-LineBytes)+x;
if(*lpPtr!
=0)
lpPtr-=LineBytes;
lpTempPtr=(char*)lpTempImgData+OffBits+x;
*lpTempPtr=0;
//在新图中,该列中共有num个黑点
lpTempPtr+=LineBytes;
if(hBitmap!
=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创立一个新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
//起不同的结果文件名
hf=_lcreat("
c:
\\hproject.bmp"
0);
else
\\vproject.bmp"
_lwrite(hf,(LPSTR)&
bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
returnTRUE;
8.2差影法
差影法的原理非常简单:
将前后两幅图象相减,得到的差作为结果结果图象。
图8.6、图8.7、图8.8能够说明差影法的原理。
图8.6
前景+背景
图8.7
背景
图8.8图8.6、图8.7
相减的结果
图8.6是前景图(猫)加背景图(木星)。
图8.7是背景图。
图8.6减图8.7的结果如图8.8所示,这样就得到了前景(不完全是前景,因为背景的灰度值并不为零,但至少可以得到前景的形状)。
差影法是非常有用的,比如说可以用在监控系统中。
在银行金库内,摄像头每隔一小段时间,拍摄一幅图,与上一幅图做差影;
如果差别超过了预先设置的阈值,说明有人,这时就应该拉响警报。
我们在介绍灰度窗口变换时,曾经提到了电影“阿甘正传”特技中应用了“蓝幕”技术,其实也包含了差影法的原理。
以下是差影法的源程序。
要注意的是,第一幅图的文件名为c:
\test.bmp,第二幅图的文件名是c:
\backgnd.bmp。
它们有着相同的灰度值和调色板。
执行时,这两个文件都已经准备好。
我们针对的虽然是二值图,但为了处理的方便,用的是256级灰度图,不过只用到了0和255两种灰度级。
BOOLSubtraction(HWNDhWnd)
DWORD
HGLOBAL
hSecond;
lpSecondImgData;
lpSecondPtr;
HDC
num,pos;
MessageBox(hWnd,"
if((hf=_lopen("
\\backgnd.bmp"
OF_READ))==HFILE_ERROR){
//背景图没找到
Filec:
\\backgnd.bmpnotfound!
//为背景图的数据分配内存
if((hSecond=GlobalAlloc(GHND,BufSize))==NULL)
//指向该内存指针
lpSecondImgData=(LPBITMAPINFOHEADER)GlobalLock(hSecond);
//文件指针指到BITMAPINFOHEADER结构开始的地方
_llseek(hf,sizeof(BITMAPFILEHEADER),FILE_BEGIN);
//读入头信息和位图数据
_lread(hf,(LPSTR)lpSecondImgData,BufSize);
//为结果图缓冲区分配内存
GlobalUnlock(hSecond);
GlobalFree(hSecond);
pos=(BufSize-LineBytes-y*LineBytes);
//lpPtr指向第一幅图,lpSecondPtr指向第二幅图,lpTempPtr指向结果图
lpPtr=(char*)lpImgData+pos;
lpSecondPtr=(char*)lpSecondImgData+pos;
lpTempPtr=(char*)lpTempImgData+pos;
num=(unsignedchar)*(lpPtr++);
num-=(unsignedchar)*(lpSecondPtr++);
*(lpTempPtr++)=(unsignedchar)fabs(num);
//两者相减取绝对值,存入新图中
if(hBitmap!
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
hf=_lcreat("
\\subtract.bmp"
8.3模板匹配
利用模板匹配可以在一幅图象中找到已知的物体。
比如抓拍到了一张射门的照片,要在该照片中找到足球的位置。
这时就可以采用模板匹配的方法。
所谓模板匹配,其实想法很简单:
拿已知的模板(在本例中为足球的图象),和原图象中同样大小的一块区域去对。
最开始时,模板的左上角点和图象的左上角点是重合的,拿模板和原图象中同样大小的一块区域去对比,然后平移到下一个象素,仍然进行同样的操作,……所有的位置都对完后,差别最小的那块就是我们要找的物体。
我们用平方误差之和来衡量原图中的块和模板之间的差别。
假设模板的大小为m×
n(宽×
高);
图象的大小为Width×
Height。
模板中的某点坐标为(x0,y0),该点的灰度为U(x0,y0);
与之重合的图象中的点坐标为(X0-x0,Y0-y0),该点的灰度为V(X0-x0,Y0-y0)。
则一次匹配的结果为:
全部图象都匹配后,找到最小的即为结果。
可以看到模板匹配的运算量是惊人的。
一次匹配都要做m×
n次减法,m×
n次平方,m×
n-1次加法,整个图象要匹配(Width-m+1)×
(Height-n+1)次。
源程序不再给出,有兴趣的读者可以自己完成。
TheUniversityofSouthernCaliforniadoesnotscreenorcontrolthecontentonthiswebsiteandthusdoesnotguaranteetheaccuracy,integrity,orqualityofsuchcontent.Allcontentonthiswebsiteisprovidedbyandisthesoleresponsibilityofthepersonfromwhichsuchcontentoriginated,andsuchcontentdoesnotnecessarilyreflecttheopinionsoftheUniversityadministrationortheBoardofTrustees


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第8章 图象的检测及模板匹配 图象 检测 模板 匹配
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《篮球行进间单手低手投篮》教学设计.docx
《篮球行进间单手低手投篮》教学设计.docx
-
《饲料添加剂管理条例》知识竞赛试题及答案要点.docx
-
4 物理届高三上学期第一次月考物理试题.docx
-
08第二学期研究生英语.docx
-
31氧气的性质与用途个案教学设计.docx
-
0225变电安规二次题库474道.docx
-
1992年大学英语四级.docx
-
Arts 专项练习.docx
-
《两只鸟蛋》说课稿.docx
-
《孙权劝学》选择阅读带答案.docx
-
《在操场上》教学反思.docx
-
4VMware FT容错原理与配置详解.docx
-
8套专升本艺术概论试题.docx
-
17秋学期《食品安全与日常饮食尔雅》在线作业2.docx
-
3500词汇40篇文章.docx
-
AST中央企业班组长岗位管理能力资格认证三期模拟10300009.docx
-
GMC大赛手册中文版.docx
-
JAVELIN智能球机.docx
-
P1口语重点题型素材更新版.docx
-
QMS质量管理体系审核员真题精选.docx
-
U2t2学教设计.docx
-
XX公路施工组织设计建议书.docx
-
XX省XX县治安拘留所工程建设项目可行性研究报告.docx
-
yy政治知识汇总架构.docx
-
安全生产违法行为行政处罚汇编.docx
-
百度网站的商业运营模式和盈利模式分析.docx
-
保险经营管理重点.docx
-
北极星群和山东群倾情奉献高考题解析5重庆卷.docx
-
《内科学》教学大纲.docx
-
《小学生数学报》全册苏教版六年级下.docx
-
5湖北省三类人员电工试题.docx
-
10食品经营过程与控制制度.docx
-
给奶奶的一封信作文合集15篇.docx
-
个人思想品德自我评价范文例文.docx
-
工程项目管理与工程造价控制.docx
-
公共营养师练习题AB卷及参考答案概述.docx
-
个人申请书汇总8篇.docx
-
给志愿者的感谢信.docx
-
工程项目管理工作总结范文与工程项目经理工作总结及工作计划汇编doc.docx
-
公路隧道施工组织设计.docx
-
各部门的服务规范与工作流程各部门工作流程.docx
-
工程采购员岗位职责共11篇.docx
-
工程质量奖罚制度.docx
-
给男朋友的一封道歉信.docx
-
公务员考试申论题型解读.docx
-
工厂员工管理制度.docx
-
给自己一些自信600字作文.docx
-
工会经费收支范围与标准.docx
-
共青入团申请书范文5篇.docx
-
工程全过程造价控制方案汇总.docx
-
工程测量实习报告.docx
