 机械原理凸轮机构课程设计任务书文档格式.doc
机械原理凸轮机构课程设计任务书文档格式.doc
- 文档编号:6969401
- 上传时间:2023-05-07
- 格式:DOC
- 页数:16
- 大小:1.21MB
机械原理凸轮机构课程设计任务书文档格式.doc
《机械原理凸轮机构课程设计任务书文档格式.doc》由会员分享,可在线阅读,更多相关《机械原理凸轮机构课程设计任务书文档格式.doc(16页珍藏版)》请在冰点文库上搜索。
3)选取滚子半径绘制凸轮实际廓线,并绘制简图。
4)编写并打印说明书。
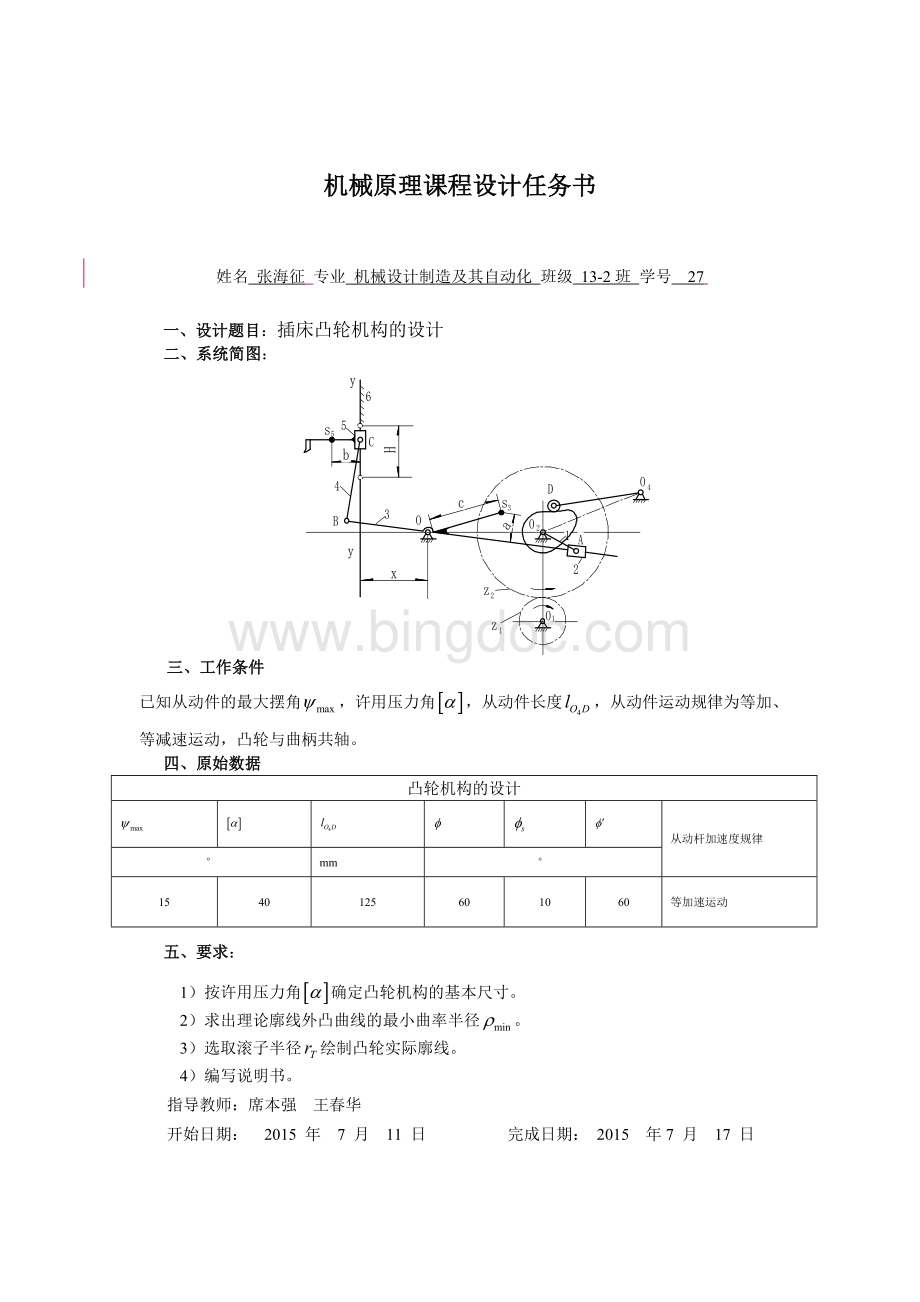
一、设计任务及要求
(凸轮机构的设计)
已知:
从动件的最大摆角,许用压力角,从动件的长度lo4d从动件的运动规律为等加,等减速运动,凸轮与曲柄共轴。
数据如下:
要求:
1)按许用压力角确定凸轮的基圆半径r0;
2)求出理论轮廓线外凸的最小曲率半径
3)选取滚子半径r绘制凸轮实际轮廓线;
4)用计算机打印出说明书
二、机构的数学模型
一、如图选取xOy坐标系,B1点为凸轮轮廓线起始点。
开始时推杆轮子中心处于B1点处,当凸轮转过角度时,摆动推杆角位移为,由反转法作图可看出,此时滚子中心应处于B2点,其直角坐标为:
式中,为推杆的初始位置角,其值为=,上式即为凸轮的理论廓线方程。
因为实际轮廓线与理论轮廓线为等距离,即法向距离处处相等,都为滚半径rT.故将理论廓线上的点沿其法向向内测移动距离rT即得实际廓线上的点B(x1,y1).由高等数学知,理论廓线B点处法线nn的斜率应为
根据上式有:
可得
实际轮廓线上对应的点B(x,y)的坐标为
此即为凸轮工作的实际廓线方程,式中“-”用于内等距线.
二、根据运动分析写出与运动方程式
1.设从动件起始角
2.1)升程加速区,其运动方程为:
2)属于升程减速区,其运动方程为:
3),属于远休止区,其运动方程为:
4)属于回程加速区,其运动方程为:
5),属于回程减速区,其运动方程为:
6),于近休止区,其运动方程为
三、程序框图
输入已知数据
计算压力角
绘制角位移,角速度,角加速度曲线图
输出计算结果,选取合理的
输出压力角,与需用压力角比较
四、程序清单及运行结果
#include<
math.h>
dos.h>
graphics.h>
conio.h>
stdio.h>
#defineI125.0
#defineAa40
#definerb50
#definerr5
#defineK(3.1415926/180)
#definedt0.25
floatQmax,Q1,Q2,Q3;
floatQ_a;
doubleL,pr;
floate[1500],f[1500],g[1500];
voidCal(floatQ,doubleQ_Q[3])
{
Qmax=15,Q1=60,Q2=10,Q3=60;
if(Q>
=0&
&
Q<
=Q1/2)
Q_Q[0]=K*(2*Qmax*Q*Q/(Q1*Q1));
Q_Q[1]=4*Qmax*Q/(Q1*Q1);
Q_Q[2]=4*Qmax/(Q1*Q1);
}
Q1/2&
=Q1)
{
Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1)*(Q-Q1)/(Q1*Q1));
Q_Q[1]=4*Qmax*(Q1-Q)/(Q1*Q1);
Q_Q[2]=-4*Qmax/(Q1*Q1);
}
=Q1&
=Q1+Q2)
{
Q_Q[0]=K*Qmax;
Q_Q[1]=0;
Q_Q[2]=0;
Q1+Q2&
=Q1+Q2+Q3/2)
Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1-Q2)*(Q-Q1-Q2)/(Q3*Q3));
Q_Q[1]=-4*Qmax*(Q-Q1-Q2)/(Q3*Q3);
Q_Q[2]=-4*Qmax/(Q3*Q3);
Q1+Q2+Q3/2&
Q1+Q2+Q3)
Q_Q[0]=K*(2*Qmax*(Q3-Q+Q1+Q2)*(Q3-Q+Q1+Q2)/(Q3*Q3));
Q_Q[1]=-4*Qmax*(Q3-Q+Q1+Q2)/(Q3*Q3);
Q_Q[2]=4*Qmax/(Q3*Q3);
Q1+Q1+Q3&
=360)
Q_Q[0]=K*0;
Q_Q[1]=0;
Q_Q[2]=0;
voidDraw(floatQ_m)
floattt,x,y,x1,y1,x2,y2,x3,x4,y3,y4,dx,dy;
doubleQQ[3];
circle(240,240,5);
circle(240+L*sin(60*K),240-L*cos(60*K),5);
moveto(240,240);
lineto(240+20*cos(240*K),240-20*sin(240*K));
lineto(260+20*cos(240*K),240-20*sin(240*K));
lineto(240,240);
moveto(240+L*sin(60*K),240-L*cos(60*K));
lineto(240+L*sin(60*K)+20*cos(240*K),240-L*cos(60*K)-20*sin(240*K));
lineto(240+L*sin(60*K)+20*cos(60*K),240-L*cos(60*K)-20*sin(240*K));
lineto(240+L*sin(60*K),240-L*cos(60*K));
for(tt=0;
tt<
=720;
tt=tt+2){Cal(tt,QQ);
/*tulunlunkuoxian*/
x1=L*cos(tt*K-30*K)-I*cos(Q_a+QQ[0]+tt*K-30*K);
y1=I*sin(Q_a+QQ[0]+tt*K-
30*K)-L*sin(tt*K-30*K);
x2=x1*cos(Q_m*K)-y1*sin(Q_m*K);
y2=x1*sin(Q_m*K)+y1*cos(Q_m*K);
putpixel(x2+240,240-y2,2);
dx=(QQ[1]+1)*I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K);
dy=(QQ[1]+1)*I*cos(Q_a+QQ[0]+tt*K-30*K)-L*cos(tt*K-30*K);
x3=x1+rr*dy/sqrt(dx*dx+dy*dy);
y3=y1-rr*dx/sqrt(dx*dx+dy*dy);
x4=x3*cos(Q_m*K)-y3*sin(Q_m*K);
y4=x3*sin(Q_m*K)+y3*cos(Q_m*K);
putpixel(x4+240,240-y4,YELLOW);
voidCurvel()
intt;
floaty1,y2,y3,a=0;
for(t=0;
t<
=360/dt;
t++)
delay(300);
a=t*dt;
if(a>
a<
y1=(2*Qmax*pow(a,2)/pow(Q1,2))*10;
y2=(4*Qmax*(dt*K)*a/pow(Q1,2))*pow(10,4.8);
y3=(4*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q1/2,300-y3,100+Q1/2,300);
if((a>
Q1/2)&
(a<
=Q1))
{
y1=(Qmax-2*Qmax*pow((Q1-a),2)/pow(Q1,2))*10;
y2=(4*Qmax*(dt*K)*(Q1-a)/pow(Q1,2))*pow(10,4.8);
y3=((-4)*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q1,300-y3,100+Q1,300);
line(100+Q1/2,300,100+Q1/2,300-y3);
}
if((a>
Q1)&
=Q1+Q2))
y1=Qmax*10;
y2=0;
y3=0;
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line((100+Q1+Q2),300,(100+Q1+Q2),300-y3);
if((a>
Q1+Q2)&
=Q1+Q2+Q3/2))
y1=(Qmax-2*Qmax*pow((a-Q1-Q2),2)/pow(Q3,2))*10;
y2=(-4*Qmax*(dt*K)*(a-Q1-Q2)/pow(Q3,2))*pow(10,4.8);
y3=(-4*Qmax*pow((dt*K),2)/pow(Q3,2))*pow(10,8.5);
line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3);
line((100+Q1+Q2),300,100+Q1+Q2,300-y3);
}
Q1+Q2+Q3/2)&
=Q1+Q2+Q3))
y1=(2*Qmax*pow((Q3+Q2+Q1-a),2)/pow(Q3,2))*10;
y2=(-4*Qmax*(dt*K)*(Q3+Q2+Q1-a)/pow(Q3,2))*pow(10,4.8);
y3=(4*Qmax*pow((dt*K),2)/pow(Q3,2))*pow(10,8.5);
line((100+Q1+Q2+Q3),300-y3,(100+Q1+Q2+Q3),300);
line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3);
Q1+Q2+Q3)&
=360))
y1=0;
y2=0;
y3=0;
putpixel(100+a,300,1);
putpixel(100+a,300,2);
putpixel(100+a,300,4);
e[t]=y1;
f[t]=y2;
g[t]=y3;
main()
intgd=DETECT,gm;
inti,t,choice,x_I,y_I,flag=1;
doubleQQ1[3],aa;
initgraph(&
gd,&
gm,"
"
);
cleardevice();
!
kbhit();
for(;
360;
)
t-=360;
if(flag==1)
for(L=I-rb+70;
L<
I+rb;
L+=2)
Q_a=acos((L*L+I*I-rb*rb)/(2.0*L*I));
Cal(t,QQ1);
aa=atan(1*(1-QQ1[1]-L*cos(Q_a-QQ1[0]))/(L*sin(Q_a+QQ1[0])));
pr=(pow((L*L+I*I*(1+QQ1[1])*(1+QQ1[1])-2.0*L*I*(1+QQ1[1]*cos(Q_a+QQ1[0]))),3.0/2))
/((1+QQ1[1])*(2+QQ1[1])*L*I*cos(Q_a+QQ1[0])+QQ1[2]*L*I*sin(Q_a+QQ1[0])-L*L-I*I*pow(1+QQ1[1],3));
if(aa<
=Aa&
pr>
rr)
flag=0;
break;
}
if(flag==0)
Cal(t,QQ1);
Draw(t);
x_I=240+L*sin(60*K)-I*cos(Q_a+QQ1[0]-30*K);
y_I=240-L*cos(60*K)-I*sin(Q_a+QQ1[0]-30*K);
circle(x_I,y_I,rr);
line(240+L*sin(60*K),240-L*cos(60*K),x_I,y_I);
delay
(1);
getch();
cleardevice();
line(100,80,100,445);
line(70,300,530,300);
line(100,80,98,90);
line(100,80,102,90);
line(520,298,530,300);
line(520,302,530,300);
setcolor
(2);
outtextxy(300,150,"
"
printf("
\n\n\n\n\n\Q(w,t)"
printf("
\n\n\n\n\n\n\n\n\n\n\n\n\n\n\t\t\t\t\t\t\t\tt"
Curvel();
getch();
\n\n\n\n\n\n\n\n\n\n"
for(i=0;
i<
=1440;
i=i+20)
{
delay(1000);
%d%f%f%f\n"
i/4,e[i],f[i],g[i]);
}
closegraph();
角度
角位移
角速度
角加速度
0
0.000
0.011
5
0.133
0.053
10
0.533
0.107
15
1.200
0.160
20
2.133
0.213
25
3.333
0.267
30
4.800
0.320
35
6.533
0.373
40
8.467
45
10.200
-0.011
50
11.667
55
12.867
60
13.800
65
14.467
70
14.867
75
15.000
80
85
90
-0.053
95
-0.107
100
-0.160
105
-0.213
110
-0.267
115
-0.320
120
-0.373
125
6.467
-0.427
130
135
140
145
150
155
160
165
170
175
180
185
190
195
200
205
210
215
220
225
230
235
240
245
250
255
260
265
270
275
280
285
290
295
300
305
310
315
320
325
330
335
340
345
350
355
360
五、设计总结
为期一周的课程设计圆满结束了,在这一周里我觉得自己学会了很多东西。
虽然这几天遇到了很多困难,但是在完成了课程设计之后心里特别的激动。
这是一次深入的综合性的总复习,也是一次理论联系实际的训练,我希望能通过这次课程设计为将来工作奠定一些基础,并从中锻炼自己,为自己以后的生活打下一个良好的基础。
但这次课程设计的确有些力不从心的地方,心里有种恐惧感,后来随着困难的慢慢解决,这种心态才一点点消失。
虽然在这次设计中自己有所收获,但同时也存在一定的不足和缺陷,我想这正是本次设计的价值所在。
所以,在以后的学习和生活中,无论怎样首先都不能气馁,要对自己有信心,遇事沉着冷静,什么事情都是可以解决的!
六、参考文献
1、机械原理课程设计指导书徐翠萍冷兴聚
2、机械原理(第七版)孙恒陈作模葛文杰
3、c程序设计谭浩强


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械 原理 凸轮 机构 课程设计 任务书
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 二年级下册数学专项练习-应用题1.docx
二年级下册数学专项练习-应用题1.docx
-
2015年小学六年级英语语法及习题.doc
-
福师2018.8《小学教育管理考核题》答案.doc
-
《西游记》课外阅读汇报课教案.doc
-
初中美术《藏书票》说课稿.doc
-
《乡愁》教学设计与反思.doc
-
17年语文龙岩质检卷(含答案).doc
-
A4作文稿纸模板.doc
-
IBMX5服务器设置流程Word文件下载.docx
-
IE部岗位职责文档格式.doc
-
IPV4向IPV6平滑过渡毕业论文Word下载.doc
-
IP数据包的捕获与分析设计报告Word文档格式.docx
-
IT服务外包及报价文档格式.doc
-
IT项目管理的六种错误思维Word下载.doc
-
IT行业服务话术及处理技巧Word文件下载.docx
-
Java仓库管理系统报告文档格式.doc
-
Java开发中的种设计模式Word格式.doc
-
浙江传媒学院笔试真题.doc
-
欧洲及北美动画史.doc
-
粮食仓储管理制度.doc
-
(完整版)《那个星期天》习题和答案.docx
-
(完整版)机房巡检表.doc
-
小升初数学全真模拟试卷1.doc
-
2022最新教科版五年级下册科学全册教案Word文档下载推荐.docx
-
机械加工件检验标准Word文档格式.docx
-
小升初数学衔接教材北师版学生版.doc
-
初中美术_文明之光——瓷器教学设计学情分析教材分析课后反思Word格式文档下载.docx
-
围堰施工专项施工安全方案文档格式.doc
 中考语文综合探究专题复习用.ppt
中考语文综合探究专题复习用.ppt
-
种植养护实施方案.docx
-
小学数学研究性学习设计方案_四年级数学_数学_小学教育_教育专区.doc
-
综合实践活动《鸟巢创意搭建》教学设计.docx
-
关于奋斗人生的励志文章.docx
-
公安政治处工作思路.docx
-
关于花钟说课稿三篇.docx
-
关于季羡林的经典散文作品季羡林经典散文.docx
-
公路水路交通科技发展战略交通运输部.docx
-
关于煤气系统检修需做的安全工作.docx
-
关于跨境电商的海关监管新公共服务建设项目可行性研究报告.docx
-
供水泵站深基坑排桩及喷锚支护开挖方案.docx
-
关于乡镇干部作风建设心得体会3篇.docx
-
关于秘书学的论文 精品.docx
-
关于音乐教学反思.docx
-
股票投资组合分析报告.docx
-
关于小学高年级英语单词快速有效记忆的教学策略doc.docx
-
管理信息系统和答案.docx
-
固网彩铃业务开局指导书TCP+CR方式.docx
-
关于油菜花的谜语.docx
-
关于512防灾减灾日活动总结5篇.docx
-
光伏电站建设并网涉网流程完整细则之欧阳科创编.docx
-
光伏能源合同管理协议.docx
