 控制系统仿真matlab第六章习题答案汇总Word文档下载推荐.docx
控制系统仿真matlab第六章习题答案汇总Word文档下载推荐.docx
- 文档编号:6906399
- 上传时间:2023-05-07
- 格式:DOCX
- 页数:18
- 大小:464.85KB
控制系统仿真matlab第六章习题答案汇总Word文档下载推荐.docx
《控制系统仿真matlab第六章习题答案汇总Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《控制系统仿真matlab第六章习题答案汇总Word文档下载推荐.docx(18页珍藏版)》请在冰点文库上搜索。
[mag,phase,w]=bode(G);
%该句只计算bode图上多个频率点w对应的幅值和相位
QWPm=50;
%取矫正后的相位为50
Flm=QWPm-Pm+5;
Flm=Flm*pi/180;
alfa=(1-sin(FIm))/(1+sin(FIm));
adb=20*log10(mag);
am=10*log10(alfa);
wc=spline(adb,w,am);
T=1/(wc*sqrt(alfa));
alfat=alfa*T;
Gc=tf([T1],[alfat1])%校正器的传递函数
Transferfunction:
0.01794s+1
0.00179s+1
figure(3)
margin(Gc*G)%系统矫正后的bode图
Ffgure3
FiltgdityiswifisertHcdtMfimdcwtitle
】I■回
BodeDiagram
Gm=17.6dB(st69Brad/sec)sPm=4S.2deg(at176rad/sec)
"
I00N11III!
1!
|!
■'
II'
'
IJII|II«
iii|i|if■j!
!
|
figure(4)
step(feedback(Gc*G,1))%校正后的单位阶跃响应曲线
Figure4
nxl
FieEdit辺足wInsertToolsDesktopWindowHelp
Ot3J-S□S■Q
作业6.2
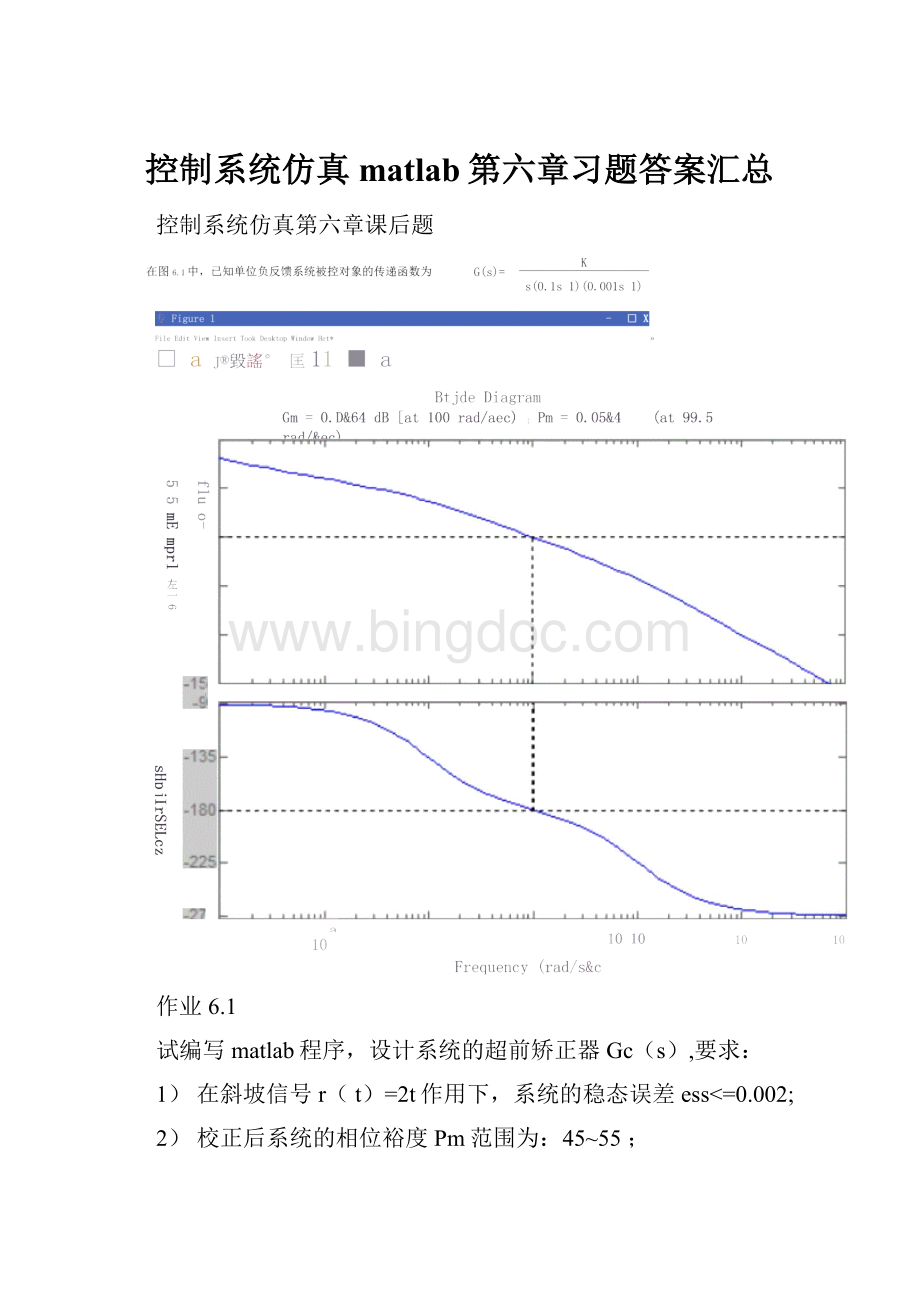
在图6.1中,已知单位负反馈系统被控对象的传递函数为
试编写matlab程序,设计系统的滞后校正器Gc(s),要求:
1)在斜坡信号r(t)=t作用下,系统的稳态误差ess乞0.01;
2)校正后系统的相位裕度Pm范围为:
40~50;
3)绘制系统矫正前后的bode图和阶跃响应曲线。
计算Kess=1/K<
=0.01K>
=100取K=100
程序如下:
G=100/(s*(0.1*s+1)*(0.02*s+1));
margin(G)%绘制校正前的bode图
如下图示,这是一个不稳定的系统。
寸FigureT-BX
除J\甥⑥诅謠k包□匡|rg
step(feedback(G,1))
可以看出系统的动态响应不稳定,处于震荡发散的状态。
P0=45;
fic=-180+P0+5;
[mu,pu,w]=bode(G);
wc2=spline(pu,w,fic);
d1=conv(conv([10],[0.11]),[0.021]);
na=polyval(100,j*wc2);
da=polyval(d1,j*wc2);
%该句是用j*wc2代替多项式中的s
G1=na/da;
g1=abs(G1);
%abs()函数是取绝对值,这里表示求复数G1的模
L=20*log10(g1);
beta=10A(L/20);
T=1/(0.1*wc2);
betat=beta*T;
Gc=tf([T1],[betat1])
Transferfunction:
1.558s+1
20.27s+1
margin(Gc*G)
^7Figure3
FileEditView
InsertToolsDesktopWindowHelp
$
UL3jjJi
|A冬纨紗S)繼乙*|口|口旦|■口
日[]如Dlagram
Gm=172吐日(at21.6rad7sec.,Pm=44.6deg;
(at6.44rad/sec)
100
-100
s-p)卷二
step(feedback(Gc*G,1))
作业6.3
试编写matlab程序,设计系统的滞后-超前校正器Gc(s),要求:
1)在单位斜坡信号r(t)=t作用下,系统的速度误差系数Kv=20s-1;
2)校正后系统的实际相位裕量Pm范围为:
42~58;
3)校正后系统的实际剪切频率wc2>
=1.3rad/s;
4)绘制系统校正前后的bode图和阶跃响应曲线。
Kk
由题知Kv=limsG(s)=lims20k=40
77s(s+1)(s+2)2
先绘制校正前的bode图和单位阶跃响应曲线,再绘制校正后的
第一种
G0=40/(s*(s+1)*(s+2));
figure
(1)
margin(G0)
step(feedback(G0,1))
校正前系统的增益裕量Gm=-16.5,相位裕量Pm=-40.4都是负值,系统不稳定
剪切频率wc1=3.19rad/s,阶跃响应曲线是发散的。
FileEditViewInsertToolsDesktopWindowHelp
OBMB■MVWV
□曰PQ|Q|食Q礬⑥7詳•復□E□Q
Gm=-16.5dB(at1.41rad/sec),Pm=・40.4deg(at3.19rad/sec)100
50050
(9P)epnu&
ew
10
10'
1
3580
11
5
(62P)<
Ds£
d
Frequency(rad/sec)
□已P®
k丨鹫筑巴⑥渥XT凰
wc2=4;
[Gm,Pm,wc1]=margin(G0);
beta=9;
T1=1/(0.1*wc1);
betat=beta*T1;
Gc1=tf([T11],[betat1])%计算并显示滞后校正器传递函数
7.071s+1
63.64s+1
sope=G0*Gc1;
%计算原系统与滞后校正器串联后的传递函数
num=sope.num{1};
den=sope.den{1};
na=polyval(num,j*wc2);
da=polyval(den,j*wc2);
G=na/da;
g1=abs(G);
alfa=10A(L/20);
T=1/(wc2*(alfa)A(1/2));
Gc2=tf([T1],[alfat1])
1.018s+1
0.06139s+1
G=G0*Gc1*Gc2;
margin(G)
step(sys)
FileEditVieA1InsertToolsDesktopWi-xiowHelp
BodeDia^rarn
Gm=17.6dB(at5.53radZsec)hPm=39.7deg(at1.71rad/sec)
SEopnuLlcncw
Q
1Q1010
Frsquencyfrac/sec}
Figure斗
Insertdesktop则如Help
A|钱3甥®
渥搖"
凰|□
1-
d)prfsd$
^1
TimeIsec}
第二种:
改进后
s=tf('
wc2=10;
T1=1/(0.1*wc1);
Gc1=tf([T11],[betat1]);
%2C?
?
e?
iooD£
?
y?
+'
卩Yo^ey
n1=conv([T11],[040]);
d1=conv(conv(conv([10],[11]),[12]),[betat1]);
na=polyval(n1,1i*wc2);
da=polyval(d1,1i*wc2);
g仁abs(G);
T=1/(wc2*(alfaF(1/2));
Gc2=tf([T1],[alfat1]);
■
Figure3
1EditViewInser
tToolsDesktopr/ndQ'
.'
Helo
Fl
E][LI|■口
BedeDiagram
一匸
figure(4)>
作业6-4
在图6.1中,已知受控对象为一个带延迟的惯性环节,其传递函数为G(S)=
17s+1匕试编写matlab程序,用Ziegler-Nichols经验整定公式中的两种方法,分别计算P,PI,PID
控制器的参数,并进行阶跃响应仿真。
由传递函数知:
比例系数K=6,惯性时间常数T=17.纯延迟时间常数t=7.可采用Ziegler-Nichols经验整定公式中阶跃响应整定法。
T09T12T
PKp,PIKp,PITi=3.,PIDKp,PIDTi=2.,PIDTd=05
KeKtKt
K=6;
T=17;
tau=7;
Gz=K/(T*s+1);
[np,dp]=pade(tau,2);
G仁tf(np,dp);
G=Gz*G1;
Pkp=T/(K*tau)%计算比例控制器的Kp
Pkp=
0.4048
step(feedback(Pkp*G,1)),holdon
PIKp=0.9*T/(K*tau);
PITi=3*tau;
%计算比例积分控制器的Kp和Ti
PIGc=PIKp*(1+1/(PITi*s))
Transferfunction:
7.65s+0.3643
21s
step(feedback(PIGc*G,1)),holdon
PIDKp=1.2*T/(K*tau);
PIDTI=2*tau;
PIDTd=0.5*tau;
PIDGc=PIDKp*(1+1/(PIDTI*s)+PIDTd*s/((PIDTd/10)*s+1))
26.18sA2+6.97s+0.4857
4.9sA2+14s
step(feedback(PIDGc*G,1)),holdon
[PIDKp,PIDTI,PIDTd]
ans=
0.485714.00003.5000
gtext('
p'
%在曲线上打印文字
PI'
PID'
igure1
□X


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 仿真 matlab 第六 习题 答案 汇总
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《篮球行进间单手低手投篮》教学设计.docx
《篮球行进间单手低手投篮》教学设计.docx
-
《饲料添加剂管理条例》知识竞赛试题及答案要点.docx
-
4 物理届高三上学期第一次月考物理试题.docx
-
08第二学期研究生英语.docx
-
31氧气的性质与用途个案教学设计.docx
-
0225变电安规二次题库474道.docx
-
1992年大学英语四级.docx
-
Arts 专项练习.docx
-
《两只鸟蛋》说课稿.docx
-
《孙权劝学》选择阅读带答案.docx
-
《在操场上》教学反思.docx
-
4VMware FT容错原理与配置详解.docx
-
8套专升本艺术概论试题.docx
-
17秋学期《食品安全与日常饮食尔雅》在线作业2.docx
-
3500词汇40篇文章.docx
-
AST中央企业班组长岗位管理能力资格认证三期模拟10300009.docx
-
GMC大赛手册中文版.docx
-
JAVELIN智能球机.docx
-
P1口语重点题型素材更新版.docx
-
QMS质量管理体系审核员真题精选.docx
-
U2t2学教设计.docx
-
XX公路施工组织设计建议书.docx
-
XX省XX县治安拘留所工程建设项目可行性研究报告.docx
-
yy政治知识汇总架构.docx
-
安全生产违法行为行政处罚汇编.docx
-
百度网站的商业运营模式和盈利模式分析.docx
-
保险经营管理重点.docx
-
北极星群和山东群倾情奉献高考题解析5重庆卷.docx
-
《内科学》教学大纲.docx
-
《小学生数学报》全册苏教版六年级下.docx
-
5湖北省三类人员电工试题.docx
-
10食品经营过程与控制制度.docx
-
第13节仪表接地Word格式文档下载.docx
-
南湖公园的作文400字Word文档格式.docx
-
两化融合填空题答案教学提纲Word下载.docx
-
精华员工个人年度工作总结汇总10篇_0Word格式文档下载.docx
-
9A文医院职能部门监管及持续改进记录表Word格式.docx
-
内科护理工作心得体会3篇 Word下载.docx
-
第40讲 格点Word文档下载推荐.docx
-
10 江海中学届高三高考考前辅导生物试题Word格式文档下载.docx
-
技术咨询合同模板汇总八篇Word文档格式.docx
-
成都二诊作文立意方向及优秀作文选Word文档下载推荐.docx
-
内勤人员年终工作总结文档格式.docx
-
精选销售方案范文集锦八篇文档格式.docx
-
关于考研的心得范文5篇文档格式.docx
-
精华自我鉴定实习报告汇总七篇Word文档下载推荐.docx
-
年度工作思路与计划Word文档下载推荐.docx
-
第二章封建大一统时期秦汉Word文件下载.docx
-
建筑资料员顶岗实习报告Word格式.docx
-
精品安全演讲稿范文合集六篇文档格式.docx
 演讲与口才讲解.ppt
演讲与口才讲解.ppt
