 httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh空间后方交会实习报告docWord文档下载推荐.docx
httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh空间后方交会实习报告docWord文档下载推荐.docx
- 文档编号:6797975
- 上传时间:2023-05-07
- 格式:DOCX
- 页数:15
- 大小:32.70KB
httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh空间后方交会实习报告docWord文档下载推荐.docx
《httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh空间后方交会实习报告docWord文档下载推荐.docx》由会员分享,可在线阅读,更多相关《httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh空间后方交会实习报告docWord文档下载推荐.docx(15页珍藏版)》请在冰点文库上搜索。
-76.63
39100.97
24934.98
2386.50
4
10.46
64.43
40426.54
30319.81
757.31
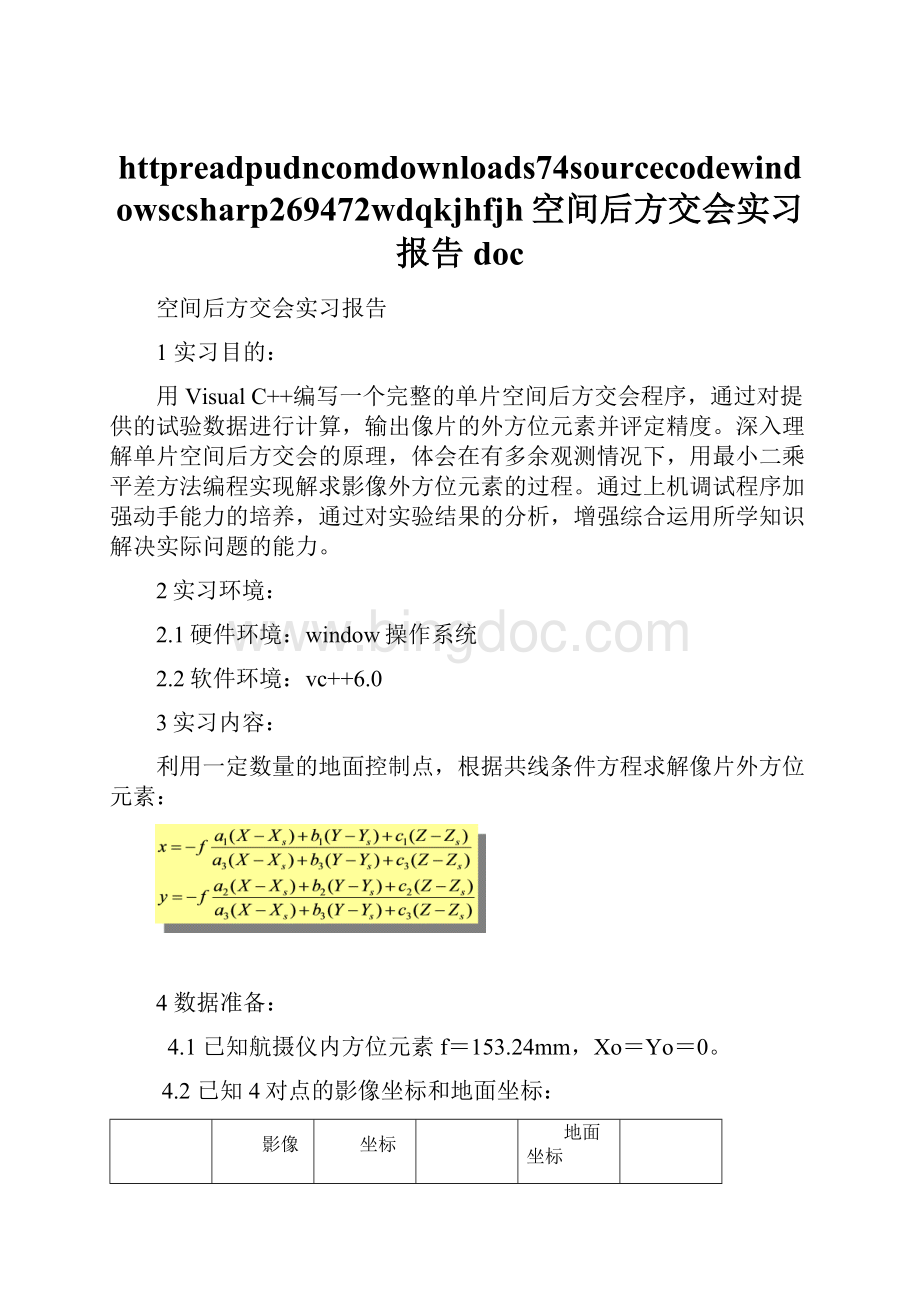
5实习过程:
5.1学习单张像片空间后方交会的基本理论,掌握其基本思想。
如果我们知道每幅影像的6个外方位元素,就能确定被摄物体与航摄影像的关系。
而单像空间后方交会就是用于测定像片的外方位元素的,它的基本思想是:
以单幅影像为基础,从影像所覆盖的地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,p,w,k.由于空间后方交会所采用的数学模型共线方程是非线性函数,为了便于外方位元素的解求,首先将其线性化。
5.2在纸上绘出空间后方交会的计算机程序框图。
为了能够在宏观上指导我们编写程序,我们需要在草稿纸上绘出程序框图。
框图如下:
输入原始数据
↓
归算像点坐标x,y
↓
计算和确定初值Xs0,Ys0,Zs0,p0,w0,k0
︱组成旋转矩阵R
︱↓
︱计算(x),(y)和lx,ly
迭↓
迭逐点组成误差方程式并法化
次↓
数否所有点完否?
小↓完
于解法方程,求未知数改正数
限↓
差计算改正后的外方位元素
否否↓
?
未知数改正数<
限差否?
否︱↓是
︱整理并输出计算结果
输出中间结果和出错信息↓
︱正常结束
非正常结束
6.按照程序框图编写程序。
程序代码如下:
//#include"
stdafx.h"
#include<
math.h>
stdlib.h>
stdio.h>
#defineq206265
//矩阵相乘
voidmult(double*m1,double*m2,double*result,intm,intp,intn)
{
inti,j,k;
for(i=0;
i<
m;
i++)
for(j=0;
j<
n;
j++)
{
result[i*n+j]=0.0;
for(k=0;
k<
p;
k++)
result[i*n+j]+=m1[i*p+k]*m2[j+k*n];
}
return;
}
//矩阵求逆
intinvers_matrix(double*m1,intn)
int*is,*js;
inti,j,k,l,u,v;
doubletemp,max_v;
is=(int*)malloc(n*sizeof(int));
js=(int*)malloc(n*sizeof(int));
if(is==NULL||js==NULL)
{
printf("
outofmemory!
\n"
);
return(0);
}
for(k=0;
max_v=0.0;
for(i=k;
for(j=k;
temp=fabs(m1[i*n+j]);
if(temp>
max_v)
{
max_v=temp;
is[k]=i;
js[k]=j;
}
if(max_v==0.0)
free(is);
free(js);
printf("
inversisnotavailble!
return(0);
if(is[k]!
=k)
for(j=0;
u=k*n+j;
v=is[k]*n+j;
temp=m1[u];
m1[u]=m1[v];
m1[v]=temp;
if(js[k]!
for(i=0;
{
u=i*n+k;
v=i*n+js[k];
temp=m1[u];
}
l=k*n+k;
m1[l]=1.0/m1[l];
for(j=0;
if(j!
{
u=k*n+j;
m1[u]*=m1[l];
}
for(i=0;
if(i!
for(j=0;
if(j!
{
u=i*n+j;
m1[u]-=m1[i*n+k]*m1[k*n+j];
}
for(i=0;
if(i!
{
u=i*n+k;
m1[u]*=-m1[l];
}
}
for(k=n-1;
k>
=0;
k--)
{
if(js[k]!
u=k*n+j;
v=js[k]*n+j;
temp=m1[u];
for(i=0;
u=i*n+k;
v=i*n+is[k];
free(is);
free(js);
return
(1);
//结果输出格式
voidstarpic()
{printf("
\t\t\t\t1.程序过程\t\t\t\n"
\t\t\t\t\t\t\t\t\n"
\t\t\t\t2.结果\t\t\t\n"
\t\t\t\t3.退出\t\t\t\n"
voidmain()
{//赋初值
inti,j,k=0,flag,num=0,d=5,Num;
doubleM,x0,y0,f,x1,y1;
doubleXs=0,Ys=0,Zs=0,aq=0,wq=0,kq=0,v=0,m;
doubleR[3][3],A[8][6],At[6][8],X[6][1],L[8][1],Ai[6][6],Ait[6][8],precision[6],V[8][1];
doublea1,a2,a3,b1,b2,b3,c1,c2,c3,X0,Y0,Z0;
doubleB[4][5]={-0.08615,-0.06899,36589.41,25273.32,2195.17,-0.05340,0.08221,37631.08,31324.51,728.69,-0.01478,-
0.07663,39100.97,24934.98,2386.50,0.01046,0.06443,40426.54,30319.81,757.31};
starpic();
loop:
\n\t\t请输入你要进行操作的选项:
"
scanf("
%d"
&
Num);
while(Num!
=1&
&
Num!
=2&
=3)
printf("
\t\t你的输入有误!
!
请输入你要进行操作的选项:
if(Num==1)
{
输入比例尺分母M:
\n"
%lf"
M);
输入像主点坐标x0,y0:
scanf("
%lf%lf"
x0,&
y0);
输入摄影机主距f:
f);
4;
请按下面的顺序输入您的第%d组数据:
像点坐标x,y对应的地面控制点坐标X,Y,Z\n"
i+1);
for(j=0;
5;
B[i][j]);
if(Num==2)
M=50000,x0=0,y0=0,f=0.15324;
if(Num==3)
\n\t\t\t*!
exit(-1);
Xs+=B[i][2];
Ys+=B[i][3];
//控制点坐标取平均值
Xs=Xs/4;
Ys=Ys/4;
Zs=M*f;
do
{//开始循环,9个方向余弦
a1=R[0][0]=cos(aq)*cos(kq)-sin(aq)*sin(wq)*sin(kq);
a2=R[0][1]=-cos(aq)*sin(kq)-sin(aq)*sin(wq)*cos(kq);
a3=R[0][2]=-sin(aq)*cos(wq);
b1=R[1][0]=cos(wq)*sin(kq);
b2=R[1][1]=cos(wq)*cos(kq);
b3=R[1][2]=-sin(wq);
c1=R[2][0]=sin(aq)*cos(kq+cos(aq)*sin(wq)*sin(kq));
c2=R[2][1]=-sin(aq)*sin(kq)+cos(aq)*sin(wq)*cos(kq);
c3=R[2][2]=cos(aq)*cos(wq);
{//由共线方程求像点坐标近似值
X0=a1*(B[i][2]-Xs)+b1*(B[i][3]-Ys)+c1*(B[i][4]-Zs);
Y0=a2*(B[i][2]-Xs)+b2*(B[i][3]-Ys)+c2*(B[i][4]-Zs);
Z0=a3*(B[i][2]-Xs)+b3*(B[i][3]-Ys)+c3*(B[i][4]-Zs);
//A矩阵中的元素计算
A[2*i][0]=(a1*f+a3*(B[i][0]-x0))/Z0;
A[2*i][1]=(b1*f+b3*(B[i][0]-x0))/Z0;
A[2*i][2]=(c1*f+c3*(B[i][0]-x0))/Z0;
A[2*i][3]=(B[i][1]-y0)*sin(wq)-(B[i][0]-x0)*(B[i][0]-x0)*cos(kq)*cos(wq)/f-f*cos(kq)*cos(wq)+(B[i][0]-x0)*(B[i][1]-y0)*sin(kq)*cos(kq)/f;
A[2*i][4]=-f*sin(kq)-(B[i][0]-x0)*(B[i][0]-x0)*sin(kq)/f-(B[i][0]-x0)*(B[i][1]-y0)*cos(kq)/f;
A[2*i][5]=B[i][1]-y0;
A[2*i+1][0]=(a2*f+a3*(B[i][1]-y0))/Z0;
A[2*i+1][1]=(b2*f+b3*(B[i][1]-y0))/Z0;
A[2*i+1][2]=(c2*f+c3*(B[i][1]-y0))/Z0;
A[2*i+1][3]=-(B[i][0]-x0)*sin(wq)-(B[i][1]-y0)*(B[i][0]-x0)*cos(kq)*cos(wq)/f+f*sin(kq)*cos(wq)+(B[i][1]-y0)*(B[i][1]-y0)*sin(kq)*cos(wq)/f;
A[2*i+1][4]=-f*cos(kq)-(B[i][1]-y0)*(B[i][0]-x0)*sin(kq)/f-(B[i][1]-y0)*(B[i][1]-y0)*cos(kq)/f;
A[2*i+1][5]=x0-B[i][0];
x1=-f*X0/Z0;
y1=-f*Y0/Z0;
//得到L矩阵
L[2*i][0]=B[i][0]-x1;
L[2*i+1][0]=B[i][1]-y1;
//转置
8;
6;
At[j][i]=A[i][j];
mult(*At,*A,*Ai,6,8,6);
if(invers_matrix(*Ai,6)==NULL)
exit(-1);
mult(*Ai,*At,*Ait,6,6,8);
mult(*Ait,*L,*X,6,8,1);
mult(*A,*X,*V,8,6,1);
Xs+=X[0][0];
Ys+=X[1][0];
Zs+=X[2][0];
aq+=X[3][0];
wq+=X[4][0];
kq+=X[5][0];
num++;
//迭带次数增加
flag=0;
for(i=3;
{//迭代控制条件
if((X[i][0]>
(0.1*3.1415/180/60))&
(num<
=d))
flag=1;
while(flag==1);
V[i][0]-=L[i][0];
2;
B[i][j]+=V[k][0];
k++;
v+=(V[i][0]*V[i][0]);
m=sqrt(v/(2*4-6));
//未知数中误差
precision[i]=m*sqrt(Ai[i][i]);
//单位权中误差
printf("
\n\n\n单片空间后方交会结果\n\n"
\t迭代次数=%d\n\n"
num);
\t像主点坐标\tx0=%.0f,y0=%.0f\n\n"
x0,y0);
\t比例尺分母\tM=%.0f\n\n"
M);
\t摄影机主距(单位:
m)\tf=%f\n\n"
f);
\t像点坐标和对应的地面控制点坐标(单位:
m):
\t第%d组点"
\t"
{if(j==0||j==1)
%f"
B[i][j]);
else
printf("
%.2f"
\t单位权中误差为(单位:
微米):
\tm=%.2f\n\n"
m*1e6);
\t该航摄相片的外方位元素为(单位:
米、弧度):
\n\tXs\tYs\t\tZs\taq\twq\t\tkq\t\t\n\t%.2f%.2f%.2f%f%f%f\n\n"
Xs,Ys,Zs,aq,wq,kq);
\t外方位元素对应的精度为:
\t\n\tXs\tYs\tZs\taq\twq\tkq\t\n"
precision[i]);
\n\n\n"
\t\t\t输出R矩阵:
\n\n"
3;
{for(j=0;
\t%.5f"
R[i][j]);
\n操作成功!
继续吗?
(1.需要2.不需要):
b2);
if(b2==1)
{starpic();
gotoloop;
\n\n\t\n"
\n\t\t\t\t谢谢使用!
7程序结果显示(略)
8实习心得与总结:
这次实习我很早就在准备,首先是反复地温习单片空间后方交会的理论知识和原理,即利用一定数量的地面控制点,根据共线条件方程,反求像片的外方位元素。
在本次实习中,我们要求用四个点地面控制点,用最小二乘法平差计算。
编程的过程中碰到问题也是很多的,首先是请教编程熟练的同学关于矩阵求逆,转置的编法,然后是调试和大量错误的修改。
最后又因为精度不够而使用别的方法。
用逐点法化代替最先的大矩阵一起运算等等。
受益很多。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- httpreadpudncomdownloads74sourcecodewindowscsharp269472wdqkjhfjh 空间 后方 交会 实习 报告 doc
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《篮球行进间单手低手投篮》教学设计.docx
《篮球行进间单手低手投篮》教学设计.docx
-
《饲料添加剂管理条例》知识竞赛试题及答案要点.docx
-
4 物理届高三上学期第一次月考物理试题.docx
-
08第二学期研究生英语.docx
-
31氧气的性质与用途个案教学设计.docx
-
0225变电安规二次题库474道.docx
-
1992年大学英语四级.docx
-
Arts 专项练习.docx
-
《两只鸟蛋》说课稿.docx
-
《孙权劝学》选择阅读带答案.docx
-
《在操场上》教学反思.docx
-
4VMware FT容错原理与配置详解.docx
-
8套专升本艺术概论试题.docx
-
17秋学期《食品安全与日常饮食尔雅》在线作业2.docx
-
3500词汇40篇文章.docx
-
AST中央企业班组长岗位管理能力资格认证三期模拟10300009.docx
-
GMC大赛手册中文版.docx
-
JAVELIN智能球机.docx
-
P1口语重点题型素材更新版.docx
-
QMS质量管理体系审核员真题精选.docx
-
U2t2学教设计.docx
-
XX公路施工组织设计建议书.docx
-
XX省XX县治安拘留所工程建设项目可行性研究报告.docx
-
yy政治知识汇总架构.docx
-
安全生产违法行为行政处罚汇编.docx
-
百度网站的商业运营模式和盈利模式分析.docx
-
保险经营管理重点.docx
-
北极星群和山东群倾情奉献高考题解析5重庆卷.docx
-
《内科学》教学大纲.docx
-
《小学生数学报》全册苏教版六年级下.docx
-
5湖北省三类人员电工试题.docx
-
10食品经营过程与控制制度.docx
-
小学汉语拼音字母表卡片word打印版免费下载.docx
-
小学课程教学改革实施方案3篇1.docx
-
小学美术卵石动物造型教学设计学情分析教材分析课后反思.docx
-
小学生晨诵午写课前演说活动方案1.docx
-
小学生自护自救安全教育教案全面完整版.docx
-
小学数学五年级应用题+附小学数学公式大全.docx
-
小学五年级上册劳动教案知识讲解.docx
-
小学一年级心理健康教案范文.docx
-
小学语文四年级上册阅读题及参考答案全套.docx
-
校科研基金追加经费项目申请书.docx
-
写奶奶作文开头.docx
-
校园安全知识竞赛题目及答案.docx
-
写人作文之通过一件事写人的作文.docx
-
心理学概论辅导4.docx
-
新版初中化学知识点总结.docx
-
新步步高学年高二生物人教版选修3文档专题5 生态工程 51 Word版含答案.docx
-
学前儿童保育学练习试题.docx
-
新建公厕及旱厕改造工程建项目建议书.docx
-
学生期末总结.docx
链接地址:https://www.bingdoc.com/p-6797975.html
