 实验三最少拍控制算法matlab仿真实验Word下载.docx
实验三最少拍控制算法matlab仿真实验Word下载.docx
- 文档编号:5958911
- 上传时间:2023-05-05
- 格式:DOCX
- 页数:16
- 大小:111.96KB
实验三最少拍控制算法matlab仿真实验Word下载.docx
《实验三最少拍控制算法matlab仿真实验Word下载.docx》由会员分享,可在线阅读,更多相关《实验三最少拍控制算法matlab仿真实验Word下载.docx(16页珍藏版)》请在冰点文库上搜索。
)[num1,den1]=tfdata(Gd,
GG=feedback(Gd,1)yd_1=0;
yd_2=0;
ed_1=0;
ed_2=0;
fork=1:
1:
35
time(k)=k*T;
rin(k)=1;
%单位阶跃信号
%闭环系统的差分方程yd(k)=num1
(2)*ed_1+num1(3)*ed_2-den1
(2)*yd_1-den1(3)*yd_2;
ed(k)=rin(k)-yd(k);
%求偏差%数据更新
ed_2=ed_1;
ed_1=ed(k);
yd_2=yd_1;
yd_1=yd(k);
end
yd%原闭环系统的输出序列
ed%原闭环系统的偏差序列
figure
(1);
plot(time,rin,'
r'
time,yd,'
g'
time,ed,'
b'
xlabel('
time'
ylabel('
rin,yd'
title('
闭环系统在单位速度信号下的响应'
text(3,23,'
红线:
输入信号;
绿线:
系统输出响应;
蓝线:
偏差'
1)原系统闭环脉冲传递函数为:
GG=
0.36788(z+0.7183)(z^2-z+0.6321)
得系统特征根为z0.5j0.618,
特征根z20.520.61820.250.490.741,即闭环系统稳定。
2)广义对象的开环脉冲传递函数为:
Gd=
0.36788(z+0.7183)
(z-1)(z-0.3679)可知,开环脉冲传递函数有z1的极点个数为1,系统为I型系统。
对于单位速度输入,稳态误差不为零。
即原来的闭环系统达不到最少拍系统中对某个输入稳定无静差的要求。
3)原闭环系统输出序列为:
yd=
Columns1through9
00.36791.00001.39961.39961.14700.89440.80150.8682
Columns10through18
0.99371.07701.0810
1.0323
0.9811
0.9607
0.9726
0.9975
1.0148
Columns19through27
1.01641.00700.9967
0.9922
0.9943
0.9992
1.0028
1.0033
1.0015
Columns28through35
0.99940.99850.9988
0.9998
1.0005
1.0007
1.0003
0.9999
可知,系统输出在第十三拍以后,基本稳定为1,满足稳定性要求。
调节时间为13s。
动态过程为13拍,
达不到最少怕的要求。
原闭环系统偏差序列为:
ed=
1.00000.63210.0000-0.3996-0.3996-0.14700.10560.19850.1318
0.0063-0.0770-0.0810-0.0323
0.0189
0.0393
0.0274
0.0025-0.0148
-0.0164-0.00700.00330.0078
0.0057
0.0008
-0.0028
-0.0033-0.0015
0.00060.00150.00120.0002
-0.0005
-0.0007
-0.0003
0.0001
可知,系统偏差输出在第十三拍(系统稳定)以后,基本保持0大小,无静差。
4)
原闭环系统输出曲线
1.4
1.2
1
0.8
yd0.6
y
i,rn0.4
0.2
-0.2
-0.4
从图中也可看出,原系统不满足最少拍要求。
需要串入最少拍调节器。
2、设计最少拍控制器:
步骤:
(1)确定有零阶保持器的广义对象G(z)
Closeall;
广义被控对象的脉冲传递函数为:
(z-1)(z-0.3679)可知,广义被控对象没有单位圆外的零极点,也没有纯滞后。
即i=j=l=0。
(2)输入为单位阶跃时,m=1,s=j+m=1,t=l+i=0最少拍系统应具有的误差脉冲传递函数、闭环脉冲传递函数分别为:
(z)m1z1m2z
1(z)1z
求待定系数,得:
(z)z11
1(z)1z1
z1
3)确定数字控制器D(z)
(4)闭环系统输出:
Y(z)R(z)(z)U(z)G(z)数字控制器的输出:
U(z)E(z)D(z)
程序:
clearallclc;
ud_1=0;
ud_2=0;
ud_3=0;
yd_1=0;
ed_1=0;
ed_3=0;
%单位阶跃信号
%加数字控制器的差分方程
yd(k)=num1
(2)*ud_1+num1(3)*ud_2-den1
(2)*yd_1-den1(3)*yd_2;
ed(k)=rin(k)-yd(k);
%数字控制器的差分方程ud(k)=(num2
(1)*ed(k)+num2
(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3-den2
(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3)/den2
(1);
%数据更新
ud_3=ud_2;
ud_2=ud_1;
ud_1=ud(k);
ed_3=ed_2;
yd_2=yd_1;
yd,ud
加数字控制器后单位阶跃信号的闭环响应及数字控制器的输出
系统输出序列:
Columns1through1001.00001.00001.00001.00001.00001.00001.00001.00001.0000
Columns11through20
1.00001.00001.0000
1.0000
Columns21through30
Columns31through35
1.00001.00001.0000控制器输出序列:
ud=
Columns1through10
1.00001.0000
2.7183-2.95252.1207-1.52331.0941-0.78590.5645-0.40550.2912
-0.2092
0.1503-0.10790.0775-0.05570.0400-0.02870.0206-0.01480.0106
-0.0076
0.0055-0.00390.0028-0.00200.0015-0.00110.0008-0.00050.0004
0.0002-0.00010.0001-0.00010.0001
可知,加数字控制器后,系统输出与系统输入在1s以后相等,说明系统是稳定的且稳态无静差。
调节
时间为1s,但观察其数字控制器输出曲线及输出序列发现,其控制器输出在28拍(28s)后才变为恒定值,
说明输出在第3拍至第28拍间,仅能保证在采样点上与输入相同,在采样点间不相同,即输出有纹波。
11
此时闭环脉冲传函为:
(z)z1
z
1z1
误差脉冲传函为:
1(z)1z
数字控制器为:
2.7183z(z-1)(z-0.3679)
z(z+0.7183)(z-1)
3、最少拍无纹波控制器:
步骤:
(1)确定有零阶保持器的广义对象G(z),广义被控对象脉冲传函:
0.36788(z+0.7183)
(z-1)(z-0.3679)广义被控对象没有单位圆外的零极点,也没有纯滞后。
(2)由G(z)有一个单位圆内的零点-0.7183,要实现无纹波,则最少拍系统的闭环脉冲传递函数要求将单位圆内圆外的所有零点都包含进来。
此时零点个数i=1。
(3)输入为单位阶跃时,m=1,s=j+m=1,t=l+i=0+1=1。
应具有的误差脉冲传递函数、闭环脉冲传递函数分别为:
(z)(10.7183z1)mz1mz10.7183mz2
mz0.7183m
2z
1(z)(1z1)(1fz1)1fz1z1fz2
z2fzzf
2
因1(z)(z)1,有
mz10.7183mz21fz1z1fz21
得方程组:
mf1
即得
f0.7183m
解方程组,得m=1/1.7183;
f=0.7183/1.7183;
10.7183
(z)1.71831.7183z2
210.7183
zz
1(z)
1.71831.7183
D(z)
(z)G(z)[1(z)]
4)闭环系统输出:
closeall;
%%零极点形式的被控对象
%求误差脉冲传函及闭环脉冲传函
phi=tf([1/1.71830.7183/1.7183],[100],T);
%闭环脉冲传函
phie=tf([1-1/1.7183-0.7183/1.7183],[100],T);
%误差脉冲传函
D=phi/(Gd*phie);
%数字控制器脉冲传函D(z)
Gd,D,phie,phi
[num1,den1]=tfdata(Gd,
[num2,den2]=tfdata(D,
%求脉冲传函的分子分母多项式'
ud_4=0;
ud_5=0;
yd_1=0;
ed_4=0;
ed_5=0;
25
%数字控制器的差分方程
ud(k)=(num2
(1)*ed(k)+num2
(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3+num2(5)*ed_4+num2(6)*ed_5-den2
(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3-den2(5)*ud_4-den2(6)*ud_5)/den2
(1);
ud_5=ud_4;
ud_4=ud_3;
ed_5=ed_4;
ed_4=ed_3;
endyd,udfigure
(1);
time,ud,'
k'
rin,yd,ud'
加数字控制器后单位阶跃信号的闭环响应及数字控制器的输出'
);
text(1.5,1.5,'
系统输入;
系统输出;
黑线:
控制器输出
00.5820
Columns21through25
控制器输出序列:
ud=
1.5820
-0.5819
-0.0000
0.0000
由图可以看出,此时调节时间变为2s,调节时间比原来延长1拍,但其控制器输出也在2拍后变为恒定值,
可以保证2拍后,输出不仅在采样点上与输入相同,还在采样点间保证相同,实现输出无纹波。
广义被控对象脉冲传函:
0.36788(z+0.7183)(z-1)(z-0.3679)闭环脉冲传函为:
0.582z+0.418
z^2
z^2-0.582z-0.418
1.582z^2(z+0.7183)(z-1)(z-0.3679)
z^2(z+0.7183)(z+0.418)(z-1)
三、思考与分析
1.最少拍受什么限制而使调整节拍增加?
2.分析不同输入信号对最少拍控制系统的影响。
3.无纹波系统对控制器有何要求?
四、实验报告要求1、写出广义被控对象的脉冲传递函数G(z)。
并求出广义被控对象的差分方程形式。
2、画出未加控制器时系统的单位阶跃响应图,分析系统是否稳定?
若稳定,求稳态误差。
3、根据最少拍设计步骤,写出针对单位阶跃输入时的闭环脉冲传递函数(z)和误差脉冲脉冲传递函数1
(z)。
给出设计出的最少拍控制器的脉冲传递函数D(z)。
并求出最少拍控制器的差分方程形式。
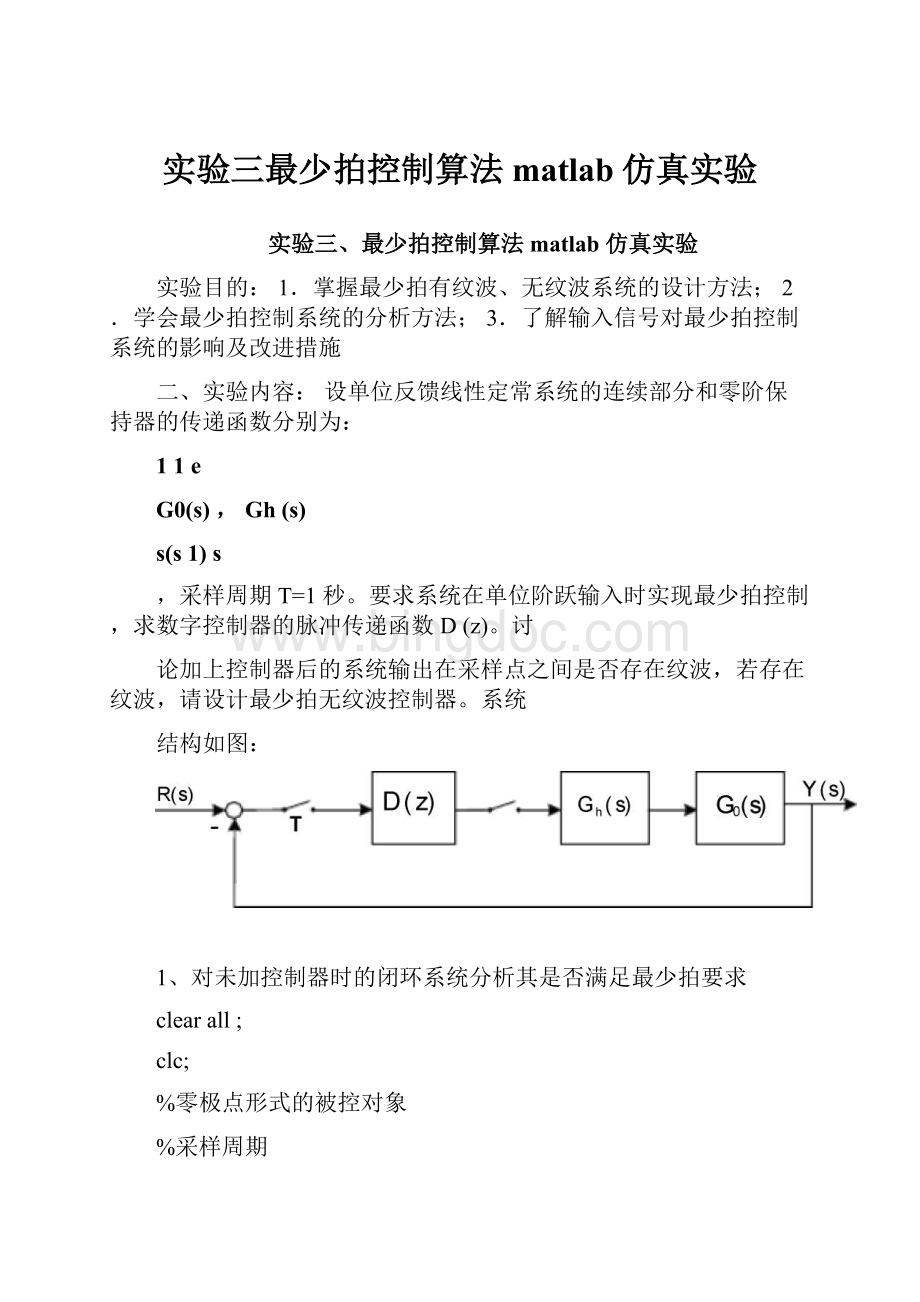
4、画出串上最少拍控制器后的数字控制系统框图。
5、将上述所求的最少拍控制器代入系统,画出系统在单位阶跃输入信号作用下的响应图,以及数字控制器的控制量变化曲线。
分析加入控制器后系统能否达到最少拍控制的要求。
给出系统输出序列和控制器输出序列,并求出调节时间,讨论输出是否存在纹波。
6、若存在纹波,请设计最少拍无纹波控制器,并给出串上最少拍无纹波控制器后的闭环脉冲传递函数(z)和误差脉冲脉冲传递函数1-(z)。
最少拍无纹波控制器的脉冲传递函数D(z)。
7、将得到的最少拍无纹波控制器代入系统,画出系统在单位阶跃输入信号作用下的响应图,以及数字控制器的控制量变化曲线。
给出系统输出序列和控制器输出序列,分析加入最少拍无纹波控制器后系统能否达到消除纹波的目的。
为消除纹波,调节时间变为多少。
8、写出针对单位斜坡信号输入时的闭环脉冲传递函数(z)和误差脉冲脉冲传递函数1-(z)。
给出设计
出的最少拍控制器的脉冲传递函数D(z)。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实验 最少 控制 算法 matlab 仿真
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 建筑工程编制依据及概况.docx
建筑工程编制依据及概况.docx
-
建筑工程质量控制点土建类.docx
-
建筑设计师的总结报告最新版.docx
-
建筑制图基础机考网考题库及复习资料.docx
-
健身房经营管理方案之欧阳科创编.docx
-
江苏省计算机二级VB考试真题及参考答案.docx
-
江西省新余市事业单位《职业能力测验》教师教育与答案.docx
-
交通信号灯及路灯施工方案.docx
-
教改课题申报书填写技巧.docx
-
教师读书活动总结4篇.docx
-
教师考核表评语.docx
-
幼儿园园务工作总结.docx
-
幼儿园中班配班个人工作计划范文五篇.docx
-
幼教考试作文写作.docx
-
热门财务述职报告锦集5篇.docx
-
人教 模块一Unit1 学案.docx
-
人教版 九年级上册 新初三暑假衔接课程 圆 第一二课时 含习题和答案教育文档.docx
-
人教版地理初二上学期综合检测卷一含答案.docx
-
人教版高二英语选修7单词表doc.docx
-
商务与经济统计作业仅供参考.docx
-
上半年安徽省安全工程师安全生产法行政处罚的概念试题.docx
-
上半年贵州省安顺市平坝区事业单位《职业能力倾向测验》试题及答案.docx
-
学年高中英语高考提能练Unit1Schoollife仿真检测灵活拆组卷牛津译林版必修1.docx
-
学年家长学校工作总结.docx
-
THE PORTABLE WEBSITE.docx
-
学校教务处工作总结4篇.docx
-
学校组织一次义卖会方案.docx
-
XX规划局大型展览馆改扩建工程项目可行性研究报告.docx
-
验工计价管理办法.docx
-
XX农家乐生态园投资经营项目商业计划书.docx
-
液晶材料市场分析报告.docx
-
XX乡村电子商务服务站项目投资建设运营方案.docx
-
小学体育自主合作学习的研究总结.docx
-
小学一年级下学期班主任工作总结相关五篇范文.docx
-
小学语文期末复习专题讲座.docx
-
校刊稿件702班.docx
-
写给爸妈的心里话简短.docx
-
心理健康教育工作计划怎么写.docx
-
新版部编版一年级语文下册整本书预习资料全汇总.docx
-
新部编人教版七年级 语文下册配套练习册文言文阅读答案及解析.docx
-
新疆生产建设兵团.docx
-
新能源汽车概述三篇.docx
-
新人音版小学音乐三年级下册教案.docx
-
新形势下商业银行与客户纠纷及处理.docx
-
新整理我是猫读后感25篇.docx
-
信息考点总结.docx
-
形体礼仪教案.docx
-
悬牛首卖马肉文言文阅读答案.docx
-
学年度初中地理八年级下册第六章 认识跨省际区域62黄土高原水土流失严重的地区晋教版拔高训.docx
-
学年河北唐山一中第一学期高二期中考试文.docx
-
学生成绩管理数据库设计.docx
