 控制工程基础期末试卷Word格式.doc
控制工程基础期末试卷Word格式.doc
- 文档编号:3638985
- 上传时间:2023-05-02
- 格式:DOC
- 页数:5
- 大小:743.58KB
控制工程基础期末试卷Word格式.doc
《控制工程基础期末试卷Word格式.doc》由会员分享,可在线阅读,更多相关《控制工程基础期末试卷Word格式.doc(5页珍藏版)》请在冰点文库上搜索。
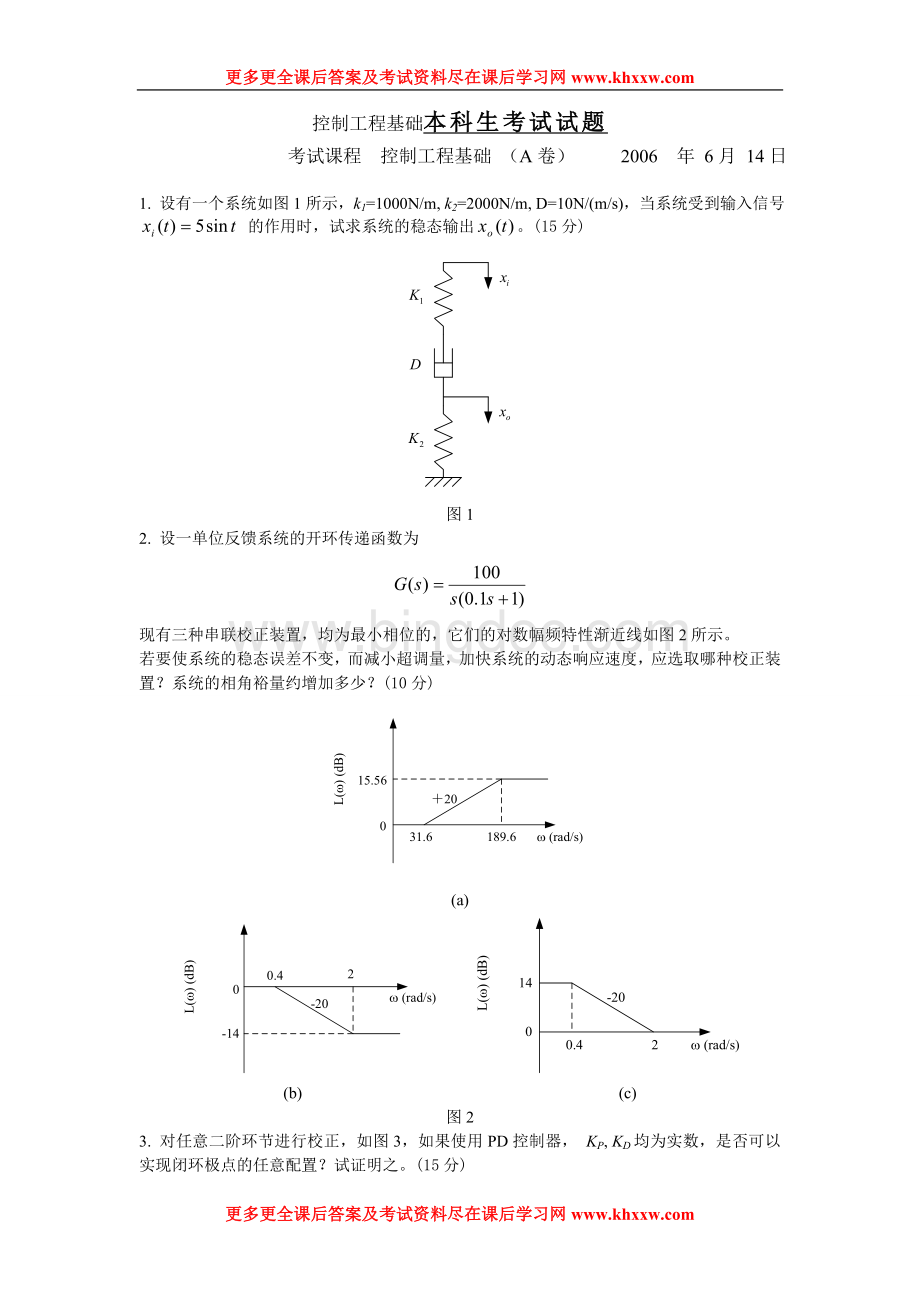
现有三种串联校正装置,均为最小相位的,它们的对数幅频特性渐近线如图2所示。
若要使系统的稳态误差不变,而减小超调量,加快系统的动态响应速度,应选取哪种校正装置?
系统的相角裕量约增加多少?
(10分)
(a)
(b)(c)
图2
3.对任意二阶环节进行校正,如图3,如果使用PD控制器,KP,KD均为实数,是否可以实现闭环极点的任意配置?
试证明之。
图3
4.一个未知传递函数的被控系统,先未经校正,构成单位反馈闭环。
经过测试,得知闭环系统的单位阶跃响应如图4所示。
问:
(1)系统的开环低频增益K0是多少?
(5分)
(2)如果用主导极点的概念用低阶系统近似该系统,试写出其近似闭环传递函数;
(3)如果采用PI形式的串联校正,KI在什么范围内时,对原开环系统相位裕量的改变约在之间?
图4
5.已知计算机控制系统如图所示,采用数字比例控制,其中K>
0。
设采样周期T=1s
图5
(1)试求系统的闭环脉冲传递函数;
(5分)
(2)试判断系统稳定的K值范围;
(5分)
(3)当系统干扰时,试求系统由干扰引起的稳态误差。
6.针对本学期直流电动机位置伺服系统教学实验,基本原理图见图6,其中,电枢控制式直流电动机电枢电阻为1.7Ω,电感为3.7mH,反电势系数Ce为0.213V/(rad/s),力矩系数Cm为0.213Nm/A,等效到电动机轴上的总转动惯量为392×
10-6Nms2,设R2=470KΩ,α=0.9,速度调节器传递函数为6,电流调节器传递函数为,功放Kpwm=1,霍尔电流传感器传递函数为2V/A,β=0.8,测速机传递系数为24V/1000rpm,数字电位计传递系数为0.243V/rad,
(1)以upi作为输入,以x作为输出,画出系统对应的方块图,并注出每个方块输入输出端的量纲表达;
(12分)
(2)对于图6所示系统,电流调节器如果采用P校正或PI校正,该位置伺服系统型次是否改变?
速度调节器采用P校正或PI校正,该位置伺服系统型次是否改变?
试说明之;
(3)试改变位置环校正形式或参数,使当输入斜坡信号时,引起的位置误差为零;
(4)电位器β值起什么作用?
(3分)
(5)在实验时,如何测试值?
试说明其根据。
图6
参考答案:
A卷
1.解:
然后通过频率特性求出
2.解:
选择(a),相角裕量约增加35°
。
3.解:
该题闭环极点能实现任意配置。
4.解:
(1),
(2)
(3)要求,,。
5.解:
(1)系统的开环脉冲传递函数
(2)特征方程为
特征根为欲使系统稳定,需满足条件
使系统稳定的K值范围为
(3)若,则
误差脉冲传递函数
误差为
利用终值定理可以求出系统的稳态误差:
6.解:
(1)
(2)不影响主回路纯积分环节个数,型次均不变。
(3)保证系统稳定的前提下,改变位置环校正形式由P校正改为PI校正即可。
(4)β用于调节速度环反馈深度,改变反馈校正参数,使系统动态特性更好,同时防止出现饱和非线性。
(5)将位置环打开,使位置环处于开环状态,输入电压=-0.5V左右,测速机输出不饱和情况下,测量数字电位计波形如图所示。
记其斜率,位置环的速度品质系数。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制工程 基础 期末试卷
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 甲醇合成的仿真实验报告.docx
甲醇合成的仿真实验报告.docx
-
动态分区分配方式的模拟C语言代码和C++代码.doc
-
复合肥成品检验报告单.docx
-
优秀团员个人事迹材料.docx
-
PDCA项目-降低非计划性拔管发生率持续改进.doc
-
丙型肝炎病毒实验活动风险评估报告.docx
-
开展大兴调查研究工作方案三篇.docx
-
受限空间作业施工方案.doc
-
车辆安全管理制度..docx
-
丙型肝炎病毒实验活动风险评估报告(精品二篇).docx
-
创客中心建设方案设计.doc
-
CAN总线与RS-232转换接口电路设计.doc
 建筑LEC危险源辨识清单.xls
建筑LEC危险源辨识清单.xls
-
【公开课教案】《印度》第一课时教学设计.docx
-
风力发电工程质量监督检查大纲.doc
-
部编版语文四年级下册《宝葫芦的秘密》节选 公开课省级一等奖教学设计.docx
-
车辆安全管理制度.docx
-
代职总结.docx
-
小王子最经典的语录.docx
-
数据共享交换平台实施方案.docx
-
管理制度咨询公司管理制度制度(制度范本).docx
-
高层图书馆给排水毕业设计.docx
-
(完整版)常用词根词缀表(综合整理).docx
-
健康宣教|为爱急救:学会心肺复苏.docx
-
小学2022年度学校工作计划——以和美教育理念为引领 创造和美教育新生活..docx
-
Seminar教学模式研究综述-精选教育文档.docx
-
幼儿教育课题申报书:基于农村田园资源的幼儿园劳动教育的实践研究.docx
-
国家机关政府部门公文标准格式(2021最新版).docx
-
云教版五年级劳动技术教案下册(改).doc
-
学校反恐防暴自查报告 (5).docx
-
社区网格化管理精细化服务工作汇报.docx
-
公路施工现场安全标志和安全防护设施设置.doc
-
海南区烟草专卖局(公司)招聘考试试题及参考答案Word格式文档下载.docx
-
古代经典名方中药复方制剂申报资料要求Word文档格式.docx
-
淮南市2014-2015(1)七年级英语期末测试题及答案Word文档格式.doc
-
基于提升思维品质的初中英语阅读教学Word下载.doc
-
信息系统开发与项目安全管理规定文档格式.docx
-
形容词比较级和最高级练习题及答案Word格式文档下载.docx
-
冀教版八年级下第一单元导学案文档格式.doc
-
江苏省无锡市梁溪区教师招聘《通用知识》真题及答案Word文档格式.docx
-
湖南地方文化常识(中考历史知识点)Word下载.doc
-
徐的组词Word格式文档下载.docx
-
宣武理综2模文档格式.docx
-
机械设计制造及其自动化专业课程简介Word文件下载.doc
-
广东省惠州市龙门县事业单位教师招聘考试《教育基础知识》真题库及答案解析Word下载.docx
-
艰苦奋斗教案Word文件下载.doc
-
旋挖钻施工试桩方案文档格式.docx
-
西藏自治区林芝二高届高三下学期第一次模拟考试汉语试题 Word版含答案Word下载.docx
-
交通部公路监理工程师资格考试模拟试题及答案道路桥梁Word格式.doc
-
南通航运职业技术学院教师招聘考试试题及答案Word文档格式.docx
-
黑龙江省大庆市肇州县教师招聘考试《通用能力测试(教育类)》 真题及答案文档格式.docx
