 一种基于特征和灰度融合的红外目标跟踪实现方法.pdf
一种基于特征和灰度融合的红外目标跟踪实现方法.pdf
- 文档编号:18938761
- 上传时间:2024-03-02
- 格式:PDF
- 页数:13
- 大小:658.38KB
一种基于特征和灰度融合的红外目标跟踪实现方法.pdf
《一种基于特征和灰度融合的红外目标跟踪实现方法.pdf》由会员分享,可在线阅读,更多相关《一种基于特征和灰度融合的红外目标跟踪实现方法.pdf(13页珍藏版)》请在冰点文库上搜索。
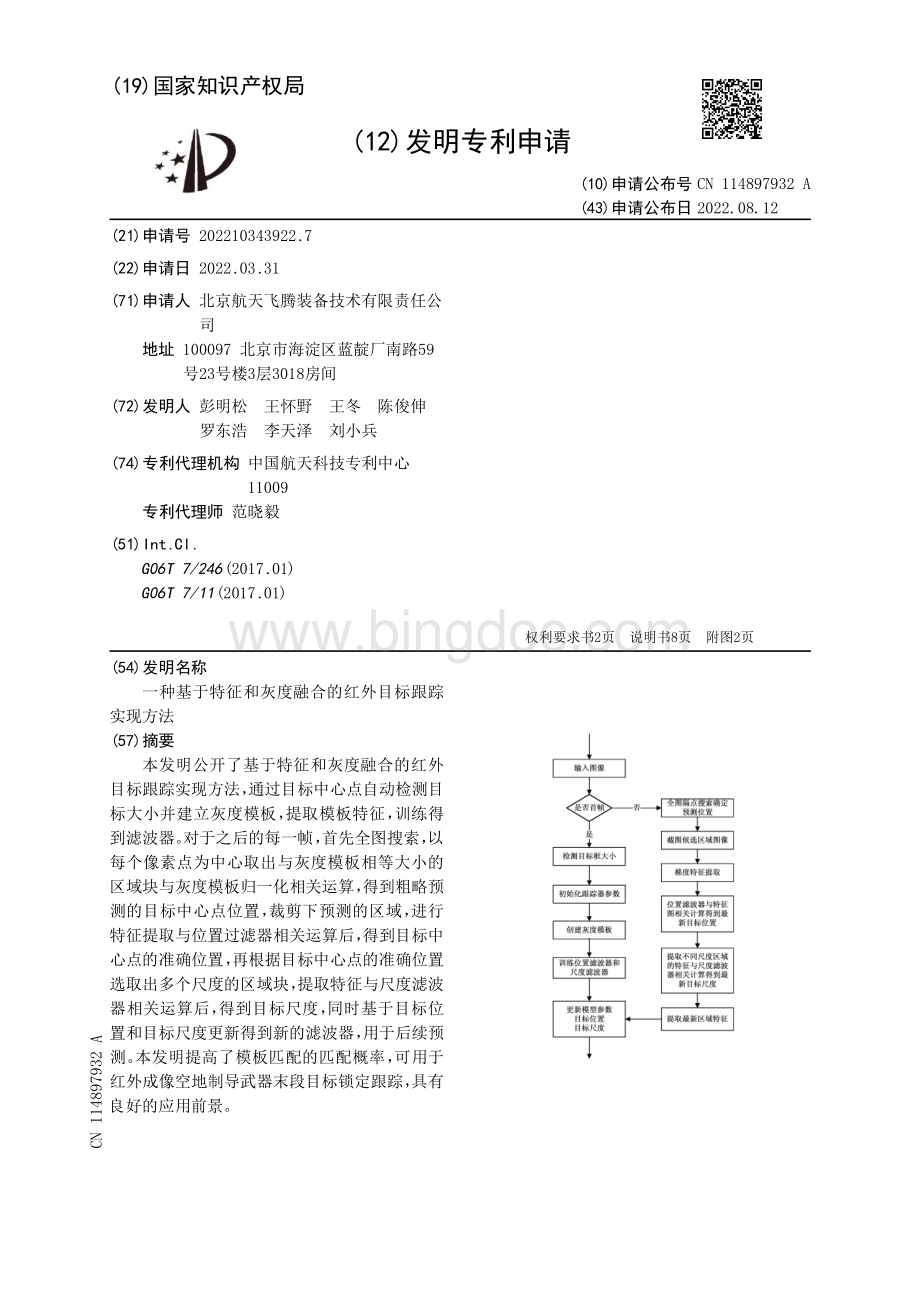
(19)国家知识产权局(12)发明专利申请(10)申请公布号(43)申请公布日(21)申请号202210343922.7(22)申请日2022.03.31(71)申请人北京航天飞腾装备技术有限责任公司地址100097北京市海淀区蓝靛厂南路59号23号楼3层3018房间(72)发明人彭明松王怀野王冬陈俊伸罗东浩李天泽刘小兵(74)专利代理机构中国航天科技专利中心11009专利代理师范晓毅(51)Int.Cl.G06T7/246(2017.01)G06T7/11(2017.01)(54)发明名称一种基于特征和灰度融合的红外目标跟踪实现方法(57)摘要本发明公开了基于特征和灰度融合的红外目标跟踪实现方法,通过目标中心点自动检测目标大小并建立灰度模板,提取模板特征,训练得到滤波器。
对于之后的每一帧,首先全图搜索,以每个像素点为中心取出与灰度模板相等大小的区域块与灰度模板归一化相关运算,得到粗略预测的目标中心点位置,裁剪下预测的区域,进行特征提取与位置过滤器相关运算后,得到目标中心点的准确位置,再根据目标中心点的准确位置选取出多个尺度的区域块,提取特征与尺度滤波器相关运算后,得到目标尺度,同时基于目标位置和目标尺度更新得到新的滤波器,用于后续预测。
本发明提高了模板匹配的匹配概率,可用于红外成像空地制导武器末段目标锁定跟踪,具有良好的应用前景。
权利要求书2页说明书8页附图2页CN114897932A2022.08.12CN114897932A1.一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,包括:
将第t帧图像中目标中心点位置记为Pt,目标框记为Rectt,t为大于等于1的整数;t1时,根据第1帧图像中目标中心点位置P1确定目标框Rect1;将第1帧图像中目标框Rect1内的区域作为灰度模板Mask1;对灰度模板Mask1进行特征提取得到特征图,利用特征图训练位置滤波器和尺度滤波器;t1时,根据t值依次增大的顺序,循环执行如下步骤S1S4:
S1以第t帧图像全图范围内的像素点为中心点,取出与灰度模板Maskt1大小相同的区域块;根据所述区域块与灰度模板Maski1的相关运算结果初步预测第t帧图像中目标中心点的位置Pt;S2对以Pt为中心点的、与灰度模板Maskt1大小相同的区域块进行特征提取得到特征图,根据特征图与位置滤波器的相关运算结果预测得到第t帧图像中目标中心点的位置Pt;S3对以Pt为中心点的多个尺度的区域块进行特征提取得到特征图,根据特征图与尺度滤波器的相关运算结果得到第t帧图像中的目标框Rectt;S4将第t帧图像中目标框Rectt内的区域作为灰度模板Maskt;对灰度模板Maskt进行特征提取得到特征图,利用特征图训练位置滤波器和尺度滤波器。
2.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,根据第1帧图像中目标中心点位置P1确定目标框Rect1的方法为:
根据第1帧图像中目标中心点位置P1初步确定目标区域范围;以第1帧图像中目标中心点位置P1为中心,对目标区域范围进行局部分割,得到目标轮廓点;根据目标轮廓点得到目标最小外包矩形;使最小外包矩形外扩35个像素,得到目标框Rect1。
3.根据权利要求2所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,以第1帧图像中目标中心点位置P1为中心,对目标区域范围进行局部分割,得到目标轮廓点的方法为:
将P1周围的区域平均划分为820个方向,以P1为起点确定各方向像素的梯度是否大于预设阈值,当某一像素梯度大于预设阈值且前一像素的梯度小于等于预设阈值时将该像素作为目标轮廓点。
4.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,所述特征提取为HOG特征提取。
5.根据权利要求4所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,所述HOG特征包括梯度方向和梯度幅值:
任意像素点I(x,y)的梯度幅值任意像素点I(x,y)的梯度方向(x,y)arctan(G1y/G1x);其中,G1x为像素点I(x,y)在水平方向的梯度,G1y为像素点I(x,y)在垂直方向的梯度,(x,y)是像素点I(x,y)梯度相对x轴的角度。
6.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,所述步骤S1中,以第t帧图像全图范围内的隔点搜索的各像素点为中心点,取出与灰权利要求书1/2页2CN114897932A2度模板Maskt1大小相同的区域块。
7.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,利用特征图训练位置滤波器和尺度滤波器的方法为:
根据特征图得到与特征图相同大小的高斯矩阵;利用傅里叶变换后的高斯矩阵和特征图训练位置滤波器和尺度滤波器。
8.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,步骤S1中,根据所述区域块与灰度模板Maski1的相关运算结果初步预测第t帧图像中目标中心点的位置Pt的方法为:
将所述区域块与灰度模板Maski1进行归一化相关运算,得到相关系数矩阵;将相关系数矩阵中最大相关系数对应的像素点作为Pt。
9.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,所述步骤S2中,根据特征图与位置滤波器的相关运算结果预测得到第t帧图像中目标中心点的位置Pt的方法为:
在第t帧图像中以Pt为中心点,截取与Maski1大小相同的区域块进行特征提取,并计算特征图与模板Maski1特征图的高斯核,通过傅里叶变换将高斯核变换到频域,根据变换到频域后的高斯核与位置滤波器匹配得到响应图,将逆傅里叶变换后的响应图中最大峰值对应的位置坐标作为第t帧图像中目标中心点的位置Pt。
10.根据权利要求1所述的一种基于特征和灰度融合的红外目标跟踪实现方法,其特征在于,所述步骤S3中,根据特征图与尺度滤波器的相关运算结果得到第t帧图像中的目标框Rectt的方法为:
将特征图调整为同一大小后组成尺度特征矩阵,对尺度特征矩阵进行奇异值分解后得到特征值,利用前个最大的特征值得到待检测特征矩阵,对待检测特征矩阵进行傅立叶变换得到频域尺度矩阵,利用尺度滤波器计算频域尺度矩阵与灰度模板Maskt1的匹配响应图,将匹配响应图中最大峰值对应的尺度作为Rectt。
权利要求书2/2页3CN114897932A3一种基于特征和灰度融合的红外目标跟踪实现方法技术领域0001本发明涉及一种基于特征和灰度融合的红外目标跟踪实现方法,尤其涉及空对地制导武器中的非制冷红外图像末制导阶段目标跟踪方法,属于精确制导领域。
背景技术0002非制冷红外成像制导具有体积小、重量轻、功耗低和成本低等优点,已成为红外技术发展的重要方向,在军事领域拥有巨大的发展空间,是近期战术制导武器研究的重点。
由于非制冷红外成像灵敏度低,图像的边缘模糊,易受环境光照、噪声干扰等影响,因此其纹理或颜色特征往往在相邻帧之间出现较大的波动,成像质量与制冷探测器相差很大,用传统的匹配方法很难得到理想的匹配精度与正确率。
0003常用的目标跟踪方法包括基于灰度模型的、基于目标轮廓的以及基于目标特征的。
基于灰度模型的方法主要有平均绝对差值(MAD)、归一化积相关(NCC)等,该类方法采用了目标的灰度信息,在目标模板受到较大程度遮挡或光照变化时跟踪效果不佳,而且目标发生尺度变化时,存在模板更新策略问题。
基于轮廓的跟踪方法,通过一定的方法得到目标轮廓后,在每一帧图像中通过微分方程递归求解,直到轮廓收敛到能量函数的局部较小值。
但是该类方法对初始化目标轮廓时对初始位置比较敏感,而且跟踪精度也有局限。
基于特征的跟踪方法适应范围更广,检测算法主要有角点、边缘、梯度特征检测等,通过对各图像区域的相应特征进行对比来选择出最为合适的区域作为最终的目标位置,该类方法可以基于图像局部区域特征,所以目标即使被部分遮挡仍可实现目标跟踪。
其中,基于角点的特征检测算法包括Moravec检测算法、SUSAN检测算法、最大稳定极值区域(MSER)检测算法、SIFT、PCASIFT、GLOD和SURF算法等;基于边缘和梯度的检测算法包括Sobel算子、Roberts算子、Canny算子、LOG算子、HOG等;但基于特征的跟踪方法应用于弹体速度相对目标足够快,且从发射到击中目标一般在十数秒内结束的短时跟踪时,除了常规的目标位置变化之外,还需要考虑弹体快速接近目标时尺度的急剧变化等因素,传统的特征匹配方法不适用快速视角变化的问题。
发明内容0004本发明的目的在于克服上述缺陷,提出了一种基于特征和灰度融合的红外目标跟踪实现方法,通过目标中心点像素自动检测目标大小并建立灰度模板,提取模板区域的特征,然后进行训练,得到目标跟踪器。
对于之后的每一帧,首先在全图搜索,以每个像素点为中心取出与灰度模板相等大小的区域块与灰度模板进行归一化相关运算,得到粗略预测的目标中心点位置,裁剪下预测的区域,进行特征提取,这些特征与位置过滤器相关运算后,得到目标中心点的准确位置,在根据目标中心点的准确位置选取出多个尺度的区域块,提取特征后与尺度滤波器相关运算后,得到目标尺度,同时基于目标位置和目标尺度更新得到新的滤波器,用于后续预测。
本发明提高了模板匹配的匹配概率,可用于红外成像空地制导武器末段目标锁定跟踪,具有良好的应用前景。
说明书1/8页4CN114897932A40005为实现上述发明目的,本发明提供如下技术方案:
0006一种基于特征和灰度融合的红外目标跟踪实现方法,包括:
0007将第t帧图像中目标中心点位置记为Pt,目标框记为Rectt,t为大于等于1的整数;0008t1时,根据第1帧图像中目标中心点位置P1确定目标框Rect1;0009将第1帧图像中目标框Rect1内的区域作为灰度模板Mask1;对灰度模板Mask1进行特征提取得到特征图,利用特征图训练位置滤波器和尺度滤波器;0010t1时,根据t值依次增大的顺序,循环执行如下步骤S1S4:
0011S1以第t帧图像全图范围内的像素点为中心点,取出与灰度模板Maskt1大小相同的区域块;根据所述区域块与灰度模板Maski1的相关运算结果初步预测第t帧图像中目标中心点的位置Pt;0012S2对以Pt为中心点的、与灰度模板Maskt1大小相同的区域块进行特征提取得到特征图,根据特征图与位置滤波器的相关运算结果预测得到第t帧图像中目标中心点的位置Pt;0013S3对以Pt为中心点的多个尺度的区域块进行特征提取得到特征图,根据特征图与尺度滤波器的相关运算结果得到第t帧图像中的目标框Rectt;0014S4将第t帧图像中目标框Rectt内的区域作为灰度模板Maskt;对灰度模板Maskt进行特征提取得到特征图,利用特征图训练位置滤波器和尺度滤波器。
0015进一步的,根据第1帧图像中目标中心点位置P1确定目标框Rect1的方法为:
0016根据第1帧图像中目标中心点位置P1初步确定目标区域范围;0017以第1帧图像中目标中心点位置P1为中心,对目标区域范围进行局部分割,得到目标轮廓点;0018根据目标轮廓点得到目标最小外包矩形;0019使最小外包矩形外扩35个像素,得到目标框Rect1。
0020进一步的,以第1帧图像中目标中心点位置P1为中心,对目标区域范围进行局部分割,得到目标轮廓点的方法为:
0021将P1周围的区域平均划分为820个方向,以P1为起点确定各方向像素的梯度是否大于预设阈值,当某一像素梯度大于预设阈值且前一像素的梯度小于等于预设阈值时将该像素作为目标轮廓点。
0022进一步的,所述特征提取为HOG特征提取。
0023进一步的,所述HOG特征包括梯度方向和梯度幅值:
0024任意像素点I(x,y)的梯度幅值0025任意像素点I(x,y)的梯度方向(x,y)arctan(G1y/G1x);0026其中,G1x为像素点I(x,y)在水平方向的梯度,G1y为像素点I(x,y)在垂直方向的梯度,(x,y)是像素点I(x,y)梯度相对x轴的角度。
0027进一步的,所述步骤S1中,以第t帧图像全图范围内的隔点搜索的各像素点为中心点,取出与灰度模板Maskt1大小相同的区域块。
0028进一步的,利用特征图训练位置滤波器和尺度滤波器的方法为:
0029根据特征图得到与特征图相同大小的高斯矩阵;说明书2/8页5CN114897932A50030利用傅里叶变换后的高斯矩阵和特征图训练位置滤波器和尺度滤波器。
0031进一步的,步骤S1中,根据所述区域块与灰度模板Maski1的相关运算结果初步预测第t帧图像中目标中心点的位置Pt的方法为:
0032将所述区域块与灰度模板Maski1进行归一化相关运算,得到相关系数矩阵;0033将相关系数矩阵中最大相关系数对应的像素点作为Pt。
0034进一步的,所述步骤S2中,根据特征图与位置滤波器的相关运算结果预测得到第t帧图像中目标中心点的位置Pt的方法为:
0035在第t帧图像中以Pt为中心点,截取与Maski1大小相同的区域块进行特征提取,并计算特征图与模板Maski1特征图的高斯核,通过傅里叶变换将高斯核变换到频域,根据变换到频域后的高斯核与位置滤波器匹配得到响应图,将逆傅里叶变换后的响应图中最大峰值对应的位置坐标作为第t帧图像中目标中心点的位置Pt。
0036进一步的,所述步骤S3中,根据特征图与尺度滤波器的相关运算结果得到第t帧图像中的目标框Rectt的方法为:
0037将特征图调整为同一大小后组成尺度特征矩阵,对尺度特征矩阵进行奇异值分解后得到特征值,利用前个最大的特征值得到待检测特征矩阵,对待检测特征矩阵进行傅立叶变换得到频域尺度矩阵,利用尺度滤波器计算频域尺度矩阵与灰度模板Maskt1的匹配响应图,将匹配响应图中最大峰值对应的尺度作为Rectt。
0038本发明与现有技术相比具有如下有益效果:
0039
(1)本发明采用组合模板匹配方法实现目标粗定位,采用特征匹配方法实现目标精定位,解决了一般算法在目标跟踪过程不适用于尺度变化、视角变化等问题,提高了目标跟踪过程的鲁棒性,特别适用于精确制导武器末制导阶段发生大尺度变化的目标跟踪,是一种适用于红外成像空地制导武器地面目标的跟踪方法;0040
(2)本发明对于首帧图像中的目标区域采用自动检测轮廓的方法,能够有效命中目标区域,简化了实际操作流程,避免了人工选取的主观性,使算法更加客观;通过自动检测轮廓的方法结合人工调整,可进一步提高准确率;0041(3)本发明融合了图像梯度幅值、梯度方向和灰度作为特征,能够最大限度的保留红外图像中目标发生位置变化和尺度变化后的共性特征;0042(4)本发明通过构造梯度方向图像,提取出红外图像中目标区域的梯度方向信息,保证了红外图像发生目标尺度变化差异大时,仍能得到相同的特征;然后通过匹配算法找出实时图像中最相似位置,提高了目标的位置预测的精确性。
附图说明0043图1为本发明红外目标跟踪实现方法流程图;0044图2为本发明首帧图像中目标框检测示意图;0045图3为利用本发明红外目标跟踪实现方法得到的跟踪效果示意图;其中(a)为第一帧图像示意图,(b)为第150帧图像示意图,(c)为第300帧图像示意图,(d)为第450帧图像示意图。
说明书3/8页6CN114897932A6具体实施方式0046下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
0047在这里专用的词“示例性”意为“用作例子、实施例或说明性”。
这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
0048导引头跟踪目标时,速度相对目标足够快,且从发射到击中目标一般可在十数秒内结束,属于短时跟踪。
该短时跟踪过程中,除了常规的目标位置变化外,弹体快速接近目标时尺度的急剧变化也是跟踪时需要考虑的主要问题之一。
本发明考虑了在实际跟踪过程中目标的外观变换和光照变化等因素的影响,而目标的边缘形状特征对光照或噪声具有较好的鲁棒性,选择基于梯度特征的目标跟踪方法,同时考虑目标的多个模板作为参考,从而提高跟踪方法的鲁棒性。
0049本发明一种基于特征和灰度融合的红外目标跟踪算法实现方法中,通过目标中心点像素自动检测目标大小并建立灰度模板,提取模板区域的梯度特征,然后进行训练,得到目标跟踪器。
对于之后的每一帧,首先在全图隔点搜索,以每一个像素点为中心取出与上一帧所得灰度模板相等大小的区域块与灰度模板进行归一化相关运算,得到一个相关系数矩阵,以矩阵中最大相关系数对应的点作为该帧图像中预测的目标中心点位置,裁剪下预测的区域,进行特征提取,并计算特征图和模板的高斯核,通过傅里叶变换将高斯核变换到频域,然后与位置滤波器相乘得到响应图,将结果做逆傅里叶变换后,最大响应点所在的区域即为要追踪目标的新位置,然后再用新位置区域训练更新得到新的位置滤波器,用于后续预测。
单一模板的匹配,具备较大限制,还可以联合两个或两个以上的模板,在实时图像中进行相关性匹配,鲁棒性、准确性都有明显提升。
本发明解决了常用模板匹配目标跟踪方法不适用于尺度变化的问题,而常用的特征匹配方法不适用快速视角变化的问题,能有效的提高目标跟踪的鲁棒性,可用于红外成像空地制导武器末段目标跟踪,具有良好的应用前景。
0050本发明一种基于特征和灰度融合的红外目标跟踪算法实现方法,具体包括:
0051
(1)首先根据第1帧图像目标中心点像素P1(x,y)初步确定待跟踪的目标区域;对目标区域进行局部分割,寻找目标边缘,再结合形态学方法计算目标最小外包矩形,在最小外包矩形的基础上再外扩35个像素,确定目标框Rect1大小;0052具体方法为:
以目标中心点像素P1(x,y)位置为圆心,计算周围灰度分布情况,将360度方向角以45度为一个单位间隔划分为8个方向,通过判断每个方向梯度大于阈值(实际应用中设置为20)的点得到一个初始轮廓,再结合区域生长或者OTSU二值分割与形态学滤波,使得分割区域更精确,计算得到目标最小外包矩形,得到目标框大小。
0053
(2)根据目标框Rect1创建灰度模板Mask1,初始化基于位置滤波器和尺度滤波器的跟踪器Tracker模型的模型参数,截取目标框Rect1内的目标区域图像并提取特征,生成与特征图同样大小的高斯矩阵,结合快速傅里叶变换训练位置滤波器和尺度滤波器,更新跟踪器Tracker中的位置估计模型和尺度估计模型参数。
0054(3)对于非首帧图像,首先在全图隔点搜索,以每一个点为中心取出与上一帧所得灰度模板相等大小的区域块与灰度模板进行归一化相关运算,得到一个相关系数矩阵,以说明书4/8页7CN114897932A7矩阵中最大相关系数对应的点作为该帧图像中初步预测的目标点位置Pt,截取目标候选区域,进行特征提取;利用位置滤波器与特征图做相关运算(优选高斯核相关),寻找最大相关位置,得到该帧图像中预测的目标中心点位置Pt;0055Pt的具体确定方法为:
0056以Pt为中心,截取目标区域图像块进行特征提取,计算候选区域和模板的高斯核,通过傅里叶变换(FFT)变换到频域,计算模板与候选区域的匹配响应图,寻找最大峰值及对应坐标位置,即为目标中心点位置Pt。
0057(4)根据该帧预测的目标中心点位置,截取多个尺度候选区域,并进行特征提取;利用尺度滤波器与特征图做相关运算(优选高斯核相关),寻找最大相关尺度,得到该帧图像中预测的目标尺度估计,即目标框;0058具体方法为:
截取多个尺度目标图像块进行特征提取,并将所有尺度的特征块重新调整为相同大小(降采样或升采样),组成为一个尺度特征矩阵,对其进行奇异值分解,取前个最大的特征值,并将其对应的特征向量组成投影矩阵,经过投影矩阵作用后得到压缩后的待检测特征矩阵,再做傅立叶变换就能够获得频域尺度矩阵,利用尺度滤波器计算相关响应,然后求相关响应,寻求最大响应值及对应尺度,即为目标最新尺度。
0059(5)根据该帧的目标中心点位置和尺度,截取该帧的目标区域并提取特征训练位置滤波器和尺度滤波器,更新位置估计模型和尺度估计模型参数,完成红外目标跟踪;0060本步骤中,根据随着图像帧数不断更新的目标位置和目标尺度进行目标特征提取得到新的跟踪器Tracker模型。
在频域内,通过根据跟踪器Tracker模型获得的特征图训练位置滤波器和尺度滤波器,实现先训练再检测,再训练再检测,这样不断循环的过程。
0061实施例1:
0062如图1所示,本实施例具体步骤如下:
0063步骤一:
首先根据首帧图像(默认为灰度图像)中目标中心点像素位置P1(x,y)位置初步确定待跟踪的目标区域;以P1(x,y)为中心,对目标区域进行局部分割,寻找目标边缘,提取目标轮廓点,计算目标最小外包矩形,在最小外包矩形的基础上再外扩4个像素确定目标框Rect1大小,如图2所示。
0064步骤二:
根据目标框Rect1大小建立灰度模板Mask1。
初始化跟踪器Tracker模型参数,提取Rect1目标区域HOG特征得到特征图tmpl,生成跟特征图tmpl同样大小的高斯矩阵prob,结合快速傅里叶变换,由特征图tmpl和高斯矩阵prob训练位置滤波器和尺度滤波器滤,更新跟踪器Tracker模型中的位置估计模型和尺度估计模型参数。
0065特征提取可以分为以下几个步骤:
确定目标检测窗口、归一化图像、计算梯度、统计梯度直方图、梯度直方图归一化,最终得到特征向量,即特征图;0066HOG提取特征是指梯度方向和梯度幅值,对于图像中像素点I(x,y)的梯度幅值|G1(X,Y)|满足00670068其中,G1x为像素点I(x,y)在水平方向的梯度,G1y为像素点I(x,y)在垂直方向的梯度。
0069图像中像素点I(x,y)的梯度方向定义为:
说明书5/8页8CN114897932A80070(x,y)arctan(G1y/G1x)0071其中(x,y)是像素点I(x,y)的梯度相对x轴的角度。
0072步骤三:
对于非首帧图像,记为第t帧图像,t1,首先是目标中心点位置估计。
在全图隔点搜索,以每一个点为中心取出与上一帧所得灰度模板相等大小的区域块与灰度模板进行归一化相关运算,得到一个相关系数矩阵,以矩阵中最大相关系数对应的点作为该图像中初步预测的目标中心点位置Pt,以Pt为中心截取目标候选区域进行特征提取;利用位置滤波器与特征图做相关运算(高斯核相关),寻找最大相关位置,得到预测的目标中心点位置Pt。
本步骤中,Pt为粗略预测结果,Pt为精确预测结果,在全图隔点搜索有利于提高处理速度。
0073假设输入图像块为f,通过特征提取算法,将获得每个图像块对应的特征图,特征维度为d,将每个维度(l1,d)的特征图记为fl,那么对于每一个图像块来说,目标就是最小化损失函数:
00740075上式中下标t表示第t帧,为正则化系数,*表示相关操作,g表示响应输出(相关输出),表示维度为的l第t帧生成的灰度模板。
对上式应用Parseval定理公式,做离散傅立叶变换之后,可以求得最优的滤波器为:
00760077第t帧训练的滤波器只和目标的理想输出G和图像块的特征F有关,再考虑时间维度的信息,对的分子和分母分别更新,记为其分子,Bt为其分母,分别进行迭代更新,为学习率,更新步骤如下:
007800790080当新的一帧(如第t帧)来的时候,同样我们会根据目标预测位置在t帧选取图像块z,经过相同的特征提取算法之后我们可以得到图像块z的特征矩阵Z,维度同样为d,将每个维度(l1,d)的特征图记为那么在频率域,对应的傅立叶输出结果Yt为:
00810082对Yt做离散傅立叶反变换之后能得到目标在t帧的置信图通过求取yt的极值处的坐标我们就获得了第t帧时目标的位置,表示傅立叶变换。
0083步骤四:
第t帧时预测的目标中心点的位置,估计目标尺度。
截取多个尺度(实际使用参数为21)候选区域,并进行特征提取;利用尺度滤波器与特征图做相关运算(高斯核相关),寻找最大相关尺度,得到第t帧的目标尺度Rectt。
0084目标的尺度估计和目标的位置估计方法类似,对目标的尺度估计是结合目标的特说明书6/8页9CN1


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 一种 基于 特征 灰度 融合 红外 目标 跟踪 实现 方法
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 甲醇合成的仿真实验报告.docx
甲醇合成的仿真实验报告.docx
-
动态分区分配方式的模拟C语言代码和C++代码.doc
-
复合肥成品检验报告单.docx
-
优秀团员个人事迹材料.docx
-
PDCA项目-降低非计划性拔管发生率持续改进.doc
-
丙型肝炎病毒实验活动风险评估报告.docx
-
开展大兴调查研究工作方案三篇.docx
-
受限空间作业施工方案.doc
-
车辆安全管理制度..docx
-
丙型肝炎病毒实验活动风险评估报告(精品二篇).docx
-
创客中心建设方案设计.doc
-
CAN总线与RS-232转换接口电路设计.doc
 建筑LEC危险源辨识清单.xls
建筑LEC危险源辨识清单.xls
-
【公开课教案】《印度》第一课时教学设计.docx
-
风力发电工程质量监督检查大纲.doc
-
部编版语文四年级下册《宝葫芦的秘密》节选 公开课省级一等奖教学设计.docx
-
车辆安全管理制度.docx
-
代职总结.docx
-
小王子最经典的语录.docx
-
数据共享交换平台实施方案.docx
-
管理制度咨询公司管理制度制度(制度范本).docx
-
高层图书馆给排水毕业设计.docx
-
(完整版)常用词根词缀表(综合整理).docx
-
健康宣教|为爱急救:学会心肺复苏.docx
-
小学2022年度学校工作计划——以和美教育理念为引领 创造和美教育新生活..docx
-
Seminar教学模式研究综述-精选教育文档.docx
-
幼儿教育课题申报书:基于农村田园资源的幼儿园劳动教育的实践研究.docx
-
国家机关政府部门公文标准格式(2021最新版).docx
-
云教版五年级劳动技术教案下册(改).doc
-
学校反恐防暴自查报告 (5).docx
-
社区网格化管理精细化服务工作汇报.docx
-
公路施工现场安全标志和安全防护设施设置.doc
-
英国签证资料完整版Word下载.docx
-
英语春新人教版七年级下英语UNIT 9 WHAT DOES HE LOOK LIKE全单元教案文档格式.docx
-
英语课堂的四种任务型教学设计Word格式文档下载.docx
-
婴幼儿常用护理核心技术和意外事故处理Word格式.docx
-
营业员技师模拟3Word格式文档下载.docx
-
应聘时自我评价Word格式.docx
-
优秀工作总结范文物理骨干教师工作总结Word下载.docx
-
有关描写云的作文500字Word文档格式.docx
-
混凝土工程培训试题.doc
-
有趣的一天作文Word文件下载.docx
-
幼儿教育题库e五简答题及答案文档格式.docx
-
幼儿园春季开学开园疫情防控环境卫生隔离室制度Word文档格式.docx
-
幼儿园的教师招聘考试试题及答案Word文件下载.docx
-
幼儿园家长开放日活动方案邀请函总结全套资料完整版Word文档下载推荐.docx
-
幼儿园园长月度工作总结三篇Word格式文档下载.docx
-
余光中《听听那冷雨》赏析Word格式文档下载.docx
-
雨水污水管道施工方案Word下载.docx
-
园林景观工程施工方案及质量保证措施Word文件下载.docx
-
整理古老的苗族多彩的歌贵州原创导游词Word格式.docx
