 扩展卡尔曼滤波(EKF)仿真演示.doc
扩展卡尔曼滤波(EKF)仿真演示.doc
- 文档编号:18721879
- 上传时间:2023-10-19
- 格式:DOC
- 页数:4
- 大小:178KB
扩展卡尔曼滤波(EKF)仿真演示.doc
《扩展卡尔曼滤波(EKF)仿真演示.doc》由会员分享,可在线阅读,更多相关《扩展卡尔曼滤波(EKF)仿真演示.doc(4页珍藏版)》请在冰点文库上搜索。
精品文档
扩展卡尔曼滤波(EKF)仿真演示
(西工大严恭敏,2012-2-4)
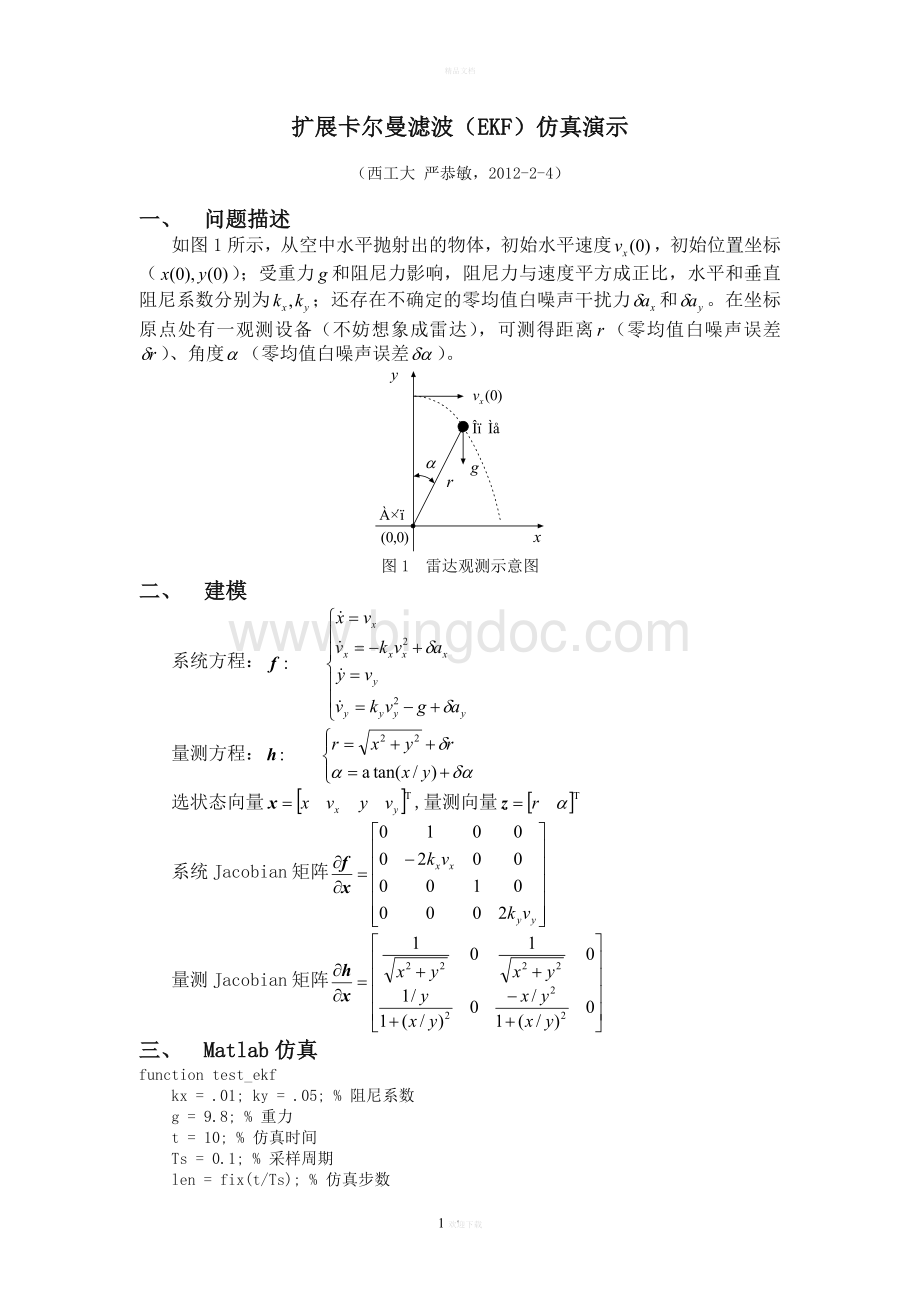
一、问题描述
如图1所示,从空中水平抛射出的物体,初始水平速度,初始位置坐标();受重力和阻尼力影响,阻尼力与速度平方成正比,水平和垂直阻尼系数分别为;还存在不确定的零均值白噪声干扰力和。
在坐标原点处有一观测设备(不妨想象成雷达),可测得距离(零均值白噪声误差)、角度(零均值白噪声误差)。
图1雷达观测示意图
二、建模
系统方程:
量测方程:
选状态向量,量测向量
系统Jacobian矩阵
量测Jacobian矩阵
三、Matlab仿真
functiontest_ekf
kx=.01;ky=.05;%阻尼系数
g=9.8;%重力
t=10;%仿真时间
Ts=0.1;%采样周期
len=fix(t/Ts);%仿真步数
%真实轨迹模拟
dax=1.5;day=1.5;%系统噪声
X=zeros(len,4);X(1,:
)=[0,50,500,0];%状态模拟的初值
fork=2:
len
x=X(k-1,1);vx=X(k-1,2);y=X(k-1,3);vy=X(k-1,4);
x=x+vx*Ts;
vx=vx+(-kx*vx^2+dax*randn(1,1))*Ts;
y=y+vy*Ts;
vy=vy+(ky*vy^2-g+day*randn
(1))*Ts;
X(k,:
)=[x,vx,y,vy];
end
figure
(1),holdoff,plot(X(:
1),X(:
3),'-b'),gridon
%figure
(2),plot(X(:
2:
2:
4))
%构造量测量
mrad=0.001;
dr=10;dafa=10*mrad;%量测噪声
fork=1:
len
r=sqrt(X(k,1)^2+X(k,3)^2)+dr*randn(1,1);
a=atan(X(k,1)/X(k,3))+dafa*randn(1,1);
Z(k,:
)=[r,a];
end
figure
(1),holdon,plot(Z(:
1).*sin(Z(:
2)),Z(:
1).*cos(Z(:
2)),'*')
%ekf滤波
Qk=diag([0;dax;0;day])^2;
Rk=diag([dr;dafa])^2;
Xk=zeros(4,1);
Pk=100*eye(4);
X_est=X;
fork=1:
len
Ft=JacobianF(X(k,:
),kx,ky,g);
Hk=JacobianH(X(k,:
));
fX=fff(X(k,:
),kx,ky,g,Ts);
hfX=hhh(fX,Ts);
[Xk,Pk,Kk]=ekf(eye(4)+Ft*Ts,Qk,fX,Pk,Hk,Rk,Z(k,:
)'-hfX);
X_est(k,:
)=Xk';
end
figure
(1),plot(X_est(:
1),X_est(:
3),'+r')
xlabel('X');ylabel('Y');title('ekfsimulation');
legend('real','measurement','ekfestimated');
%%%%%%%%%%%%%%%%%%%%子程序%%%%%%%%%%%%%%%%%%%
functionF=JacobianF(X,kx,ky,g)%系统状态雅可比函数
vx=X
(2);vy=X(4);
F=zeros(4,4);
F(1,2)=1;
F(2,2)=-2*kx*vx;
F(3,4)=1;
F(4,4)=2*ky*vy;
functionH=JacobianH(X)%量测雅可比函数
x=X
(1);y=X(3);
H=zeros(2,4);
r=sqrt(x^2+y^2);
H(1,1)=1/r;H(1,3)=1/r;
xy2=1+(x/y)^2;
H(2,1)=1/xy2*1/y;H(2,3)=1/xy2*x*(-1/y^2);
functionfX=fff(X,kx,ky,g,Ts)%系统状态非线性函数
x=X
(1);vx=X
(2);y=X(3);vy=X(4);
x1=x+vx*Ts;
vx1=vx+(-kx*vx^2)*Ts;
y1=y+vy*Ts;
vy1=vy+(ky*vy^2-g)*Ts;
fX=[x1;vx1;y1;vy1];
functionhfX=hhh(fX,Ts)%量测非线性函数
x=fX
(1);y=fX(3);
r=sqrt(x^2+y^2);
a=atan(x/y);
hfX=[r;a];
function[Xk,Pk,Kk]=ekf(Phikk_1,Qk,fXk_1,Pk_1,Hk,Rk,Zk_hfX)%ekf滤波函数
Pkk_1=Phikk_1*Pk_1*Phikk_1'+Qk;
Pxz=Pkk_1*Hk';Pzz=Hk*Pxz+Rk;Kk=Pxz*Pzz^-1;
Xk=fXk_1+Kk*Zk_hfX;
Pk=Pkk_1-Kk*Pzz*Kk';
图2仿真结果
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求
4欢迎下载
。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 扩展 卡尔 滤波 EKF 仿真 演示
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 甲醇合成的仿真实验报告.docx
甲醇合成的仿真实验报告.docx
-
动态分区分配方式的模拟C语言代码和C++代码.doc
-
复合肥成品检验报告单.docx
-
优秀团员个人事迹材料.docx
-
PDCA项目-降低非计划性拔管发生率持续改进.doc
-
丙型肝炎病毒实验活动风险评估报告.docx
-
开展大兴调查研究工作方案三篇.docx
-
受限空间作业施工方案.doc
-
车辆安全管理制度..docx
-
丙型肝炎病毒实验活动风险评估报告(精品二篇).docx
-
创客中心建设方案设计.doc
-
CAN总线与RS-232转换接口电路设计.doc
 建筑LEC危险源辨识清单.xls
建筑LEC危险源辨识清单.xls
-
【公开课教案】《印度》第一课时教学设计.docx
-
风力发电工程质量监督检查大纲.doc
-
部编版语文四年级下册《宝葫芦的秘密》节选 公开课省级一等奖教学设计.docx
-
车辆安全管理制度.docx
-
代职总结.docx
-
小王子最经典的语录.docx
-
数据共享交换平台实施方案.docx
-
管理制度咨询公司管理制度制度(制度范本).docx
-
高层图书馆给排水毕业设计.docx
-
(完整版)常用词根词缀表(综合整理).docx
-
健康宣教|为爱急救:学会心肺复苏.docx
-
小学2022年度学校工作计划——以和美教育理念为引领 创造和美教育新生活..docx
-
Seminar教学模式研究综述-精选教育文档.docx
-
幼儿教育课题申报书:基于农村田园资源的幼儿园劳动教育的实践研究.docx
-
国家机关政府部门公文标准格式(2021最新版).docx
-
云教版五年级劳动技术教案下册(改).doc
-
学校反恐防暴自查报告 (5).docx
-
社区网格化管理精细化服务工作汇报.docx
-
公路施工现场安全标志和安全防护设施设置.doc
-
中水泵房施工记录部分.docx
-
双变量回归与相关.docx
-
石油地质学考研资料必背.docx
-
XX品牌矿泉水生产线项目建设可行性研究报告.docx
-
私人关系对营销权力使用的影响.docx
-
食品加工中常用的清洗消毒方法.docx
-
XX小学四年级信息技术下册全册教案.docx
-
收入分配劳动分工多重性及其制度创新.docx
-
四六级考试作文评分标准分析.docx
-
重庆市巫溪县中学校学年高一上学期第一次月考语文试题 Word版含答案.docx
-
苏教版必修四《滕王阁序》word示范教案.docx
-
数字电视教育信息平台项目建设可行性研究报告.docx
-
爱是奉献的作文8篇.docx
-
苏州物理中考试题及答案.docx
-
说课稿.docx
-
四风问题的主要表现doc.docx
-
天津市滨海新区学年高一上学期期末联考语文试题.docx
-
同学聚会发言稿格式范文.docx
-
四语学案.docx
