 过程控制实验解析.docx
过程控制实验解析.docx
- 文档编号:16217867
- 上传时间:2023-07-11
- 格式:DOCX
- 页数:24
- 大小:288.84KB
过程控制实验解析.docx
《过程控制实验解析.docx》由会员分享,可在线阅读,更多相关《过程控制实验解析.docx(24页珍藏版)》请在冰点文库上搜索。
过程控制实验解析
第一节单容水箱特性的测试
一、实验目的
1. 掌握单容水箱的阶跃响应的测试方法,并记录相应液位的响应曲线。
2. 根据实验得到的液位阶跃响应曲线,用相关的方法确定被测对象的特征
参数 T 和传递函数。
二、实验设备
1. THJ-2 型高级过程控制系统实验装置
2. 计算机及相关软件
3. 万用电表一只
三、实验原理
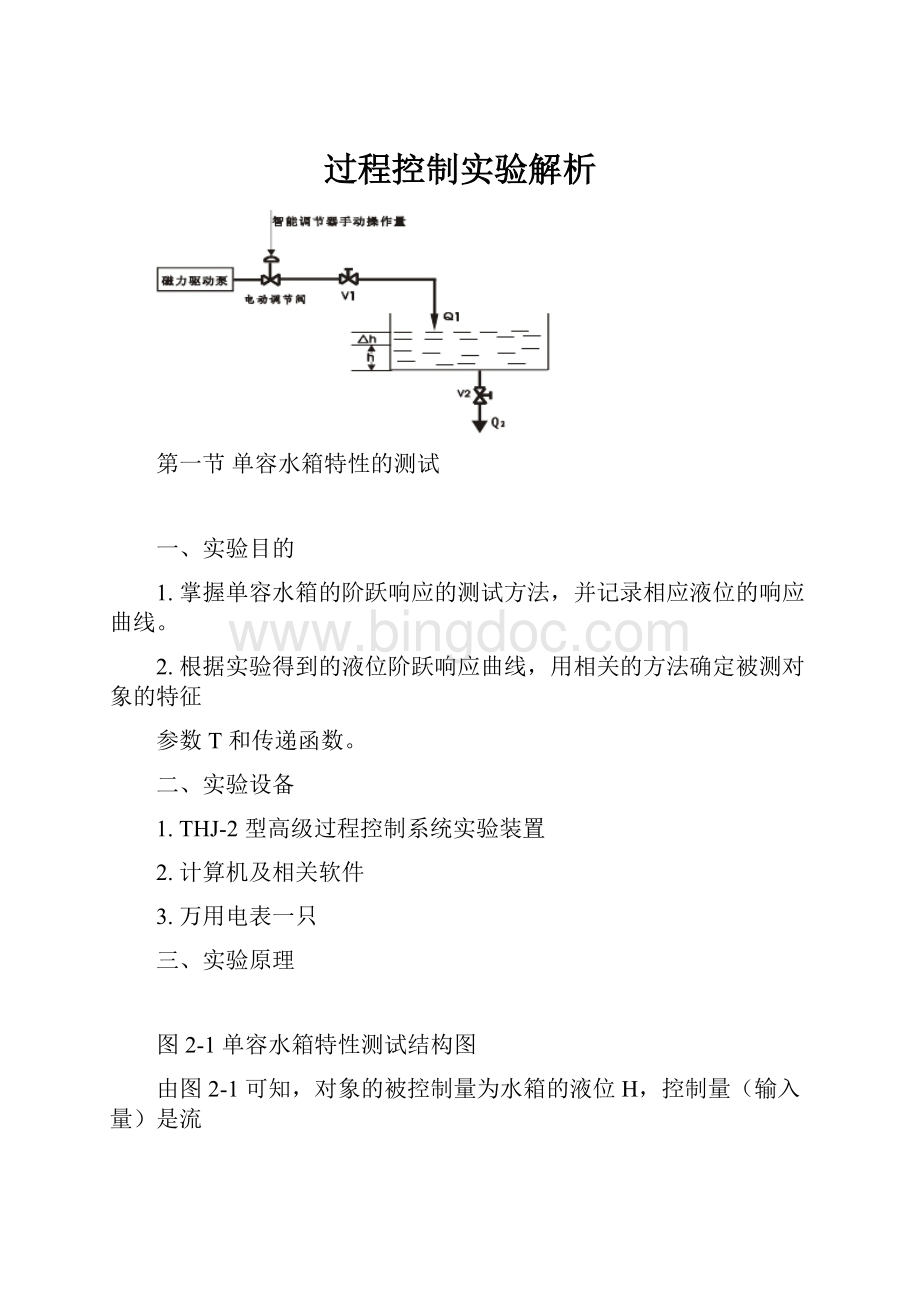
图 2-1 单容水箱特性测试结构图
由图 2-1 可知,对象的被控制量为水箱的液位 H,控制量(输入量)是流
入水箱中的流量 Q1,手动阀 V1 和 V2 的开度都为定值,Q2 为水箱中流出的流量。
根据物料平衡关系,在平衡状态时
Q10-Q20=0
(1)
动态时,则有
Q1-Q2=
dV
dt
(2)
式中 V 为水箱的贮水容积,
dV
dt
为水贮存量的变化率,它与 H 的关系为
dV = Adh ,即
dV
dt
= A
dh
dt
(3)
A 为水箱的底面积。
把式(3)代入式
(2)得
Q1-Q2=A
dh
dt
(4)
基于 Q2=
h
RS
,RS 为阀 V2 的液阻,则上式可改写为
Q1-
h
RS
= A
dh
dt
即
ARS
dh
dt
+h=KQ1
或写作
=
Q1(s)TS + 1
式中 T=ARS,它与水箱的底积 A 和 V2 的 RS 有关;K=RS。
式(5)就是单容水箱的传递函数。
(5)
若令 Q1(S)=
R0
S
,R0=常数,则式(5)可改为
H(S)=
K / T
1
T
×
R0
S
=K
R0
S
-
KR0
1
T
对上式取拉氏反变换得
h(t)=KR0(1-e-t/T)(6)
当 t—>∞时,h(∞)=KR0,因而有
K=h(∞)/R0=输出稳态值/阶跃输入
当 t=T 时,则有
h(T)=KR0(1-e-1)=0.632KR0=0.632h(∞)
式(6)表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图 2-2 所示。
当由实验求得图 2-2 所示的阶跃响应曲线后,该曲线上升到稳态值的 63%
图 2-2 单容水箱的单调上升指数曲线
所对应的时间,就是水箱的时间常数 T。
该时间常数 T 也可以通过坐标原
点对响应曲线作切线,切线与稳态值交点所对应的时间就是时间常数 T,由响
应曲线求得 K 和 T 后,就能求得单容水箱的传递函数。
如果对象的阶跃响应曲
线为图 2-3,则在此曲线的拐点 D 处作一切线,它与时间轴交于 B 点,与响应
参数值
测量值
液位 h
K
T
τ
正向输入
负向输入
平均值
6.把由实验曲线所得的结果填入下表。
五、实验报告
稳态值的渐近线交于 A 点。
图中 OB 即为对象的滞后时间 τ,BC 为对象的时间
常数 T,所得的传递函数为:
H(S)=
Ke -τs
1 + Ts
图 2-3 单容水箱的阶跃响应曲线
四、实验内容与步骤
1.按图 2-1 接好实验线路,并把阀 V1 和 V2 开至某一开度,且使 V1 的开度
大于 V2 的开度。
2.接通总电源和相关的仪表电源,并启动磁力驱动泵。
3.把调节器设置于手动操作位置,通过调节器增/减的操作改变其输出量
的大小,使水箱的液位处于某一平衡位置。
4.手动操作调节器,使其输出有一个正(或负)阶跃增量的变化(此增量
不宜过大,以免水箱中水溢出),于是水箱的液位便离开原平衡状态,经过一定
的调节时间后,水箱的液位进入新的平衡状态,如图 2-4 所示。
图 2-4 单容箱特性响应曲线
5.启动计算机记下水箱液位的历史曲线和阶跃响应曲线。
1.写出常规的实验报告内容。
2.分析用上述方法建立对象的数学模型有什么局限性?
六、思考题
1.做本实验时,为什么不能任意改变出水口阀开度的大小?
2.用响应曲线法确定对象的数学模型时,其精度与那些因素有关?
第二节双容水箱特性的测试
一、实验目的
1. 熟悉双容水箱的数学模型及其阶跃响应曲线。
2. 根据由实际测得双容液位的阶跃响应曲线,确定其传递函数。
二、实验设备
1. THJ-2 型高级过程控制系统实验装置
2. 计算机、MCGS 工控组态软件、RS232/485 转换器 1 只、串口线 1 根
3. 万用表 1 只
三、原理说明
图 2-5 双容水箱对象特性结构图
由图 2-5 所示,被控对象由两个水箱相串联连接,由于有两个贮水的容积,
故称其为双容对象。
被控制量是下水箱的液位,当输入量有一阶跃增量变化时,
两水箱的液位变化曲线如图 2-6 所示。
由图 2-6 可见,上水箱液位的响应曲线
为一单调的指数函数(图 2-6 (a)),而下水箱液位的响应曲线则呈 S 形状(图
2-6 (b))。
显然,多了一个水箱,液位响应就更加滞后。
由 S 形曲线的拐点 P 处作一切线,它与时间轴的交点为 A,OA 则表示了对
象响应的滞后时间。
至于双容对象两个惯性环节的时间常数可按下述方法来确
定。
图 2-6 双容液位阶跃响应曲线
t 1t 2
图 2-7 双容液位阶跃响应曲线
在图 2-7 所示的阶跃响应曲线上求取:
(1) h2(t)|t=t1=0.4 h2(∞)时曲线上的点 B 和对应的时间 t1;
(2)h2(t)|t=t2=0.8 h2(∞)时曲线上的点 C 和对应的时间 t2。
然后,利用下面的近似公式计算式
K =
h2(∞)
RO
=
输入稳态值
阶跃输入量
T1 + T2 ≈
t1 + t2
2.16
参数值
测量值
液位 h
K
T1
T2
τ
正向输入
负向输入
平均值
T1T2
(T1 + T2)
2
≈ (1.74
t1
t 2
- 0.55)
0.32〈t1/t2〈0.46
由上述两式中解出 T1 和 T2,于是求得双容(二阶)对象的传递函数为
G(S)=
K
(T1S + 1)(T2 S + 1)
e-τS
四、实验内容与步骤
1、接通总电源和相关仪表的电源。
2、接好实验线路,打开手动阀,并使它们的开度满足下列关系:
V1 的开度>V2 的开度>V3 的开度
3、把调节器设置于手动位置,按调节器的增/减,改变其手动输出值,使
下水箱的液位处于某一平衡位置(一般为水箱的中间位置)。
4、按调节器的增/减按钮,突增/减调节器的手动输出量,使下水箱的液位
由原平衡状态开始变化,经过一定的调节时间后,液位 h2 进入另一个平衡状态。
5、上述实验用计算机实时记录 h2 的历史曲线和在阶跃扰动后的响应曲线。
五、实验报告
1、完成常规实验报告内容。
2、对实验的数据进行分析。
六、思考题
1、在本实验中,为什么对出水阀不能任意改变其开度?
2、引起双容对象的滞后特性是什么?
第三节电动调节阀流量特性的测试
一、实验目的
1、了解电动阀节阀的结构与工作原理。
2、通过实验,进一步了解电动调节阀流量的特性。
二、实验设备
1、THJ-2 型过程控制实验装置
2、计算机及相关的软件。
3、万用表1 只
三、实验原理
电动调节阀包括执行机构和阀两个部分,它是过程控制系统中的一个重要
环节。
电动调节阀接受调节器输出 4~20mADC 的信号,并将其转换为相应输出
轴的角位移,以改变阀节流面积 S 的大小。
图 2-9 为电动调节阀与管道的连接
图。
图 2-9 电动调节阀与管道的连接图
图中:
u----来自调节器的控制信号(4~20mADC)
θ---阀的相对开度
s ---阀的截流面积
q----液体的流量
由过程控制仪表的原理可知,阀的开度 θ 与控制信号的静态关系是线性的,
而开度 θ 与流量 Q 的关系是非线性的。
图 2-10 为本实验结构示意图.
图 2-10 电动调节阀特性实验结构示意图
四、实验报告与步骤
1.按图 2-10 所示的实验结构示意图,完成实验系统的接线。
2.接通总电源和相关仪表的电源,并把手动阀置于一定的开度。
3.把调节器置于手动状态,并使其输出相应于电动阀开度的
10%、20%、······100%,分别记录不同状态时调节器的输出电流和相应
的流量。
4.由电流 I 作横作标,流量 Q 作纵坐标,画出 Q=F(I)的曲线。
五、实验报告
1. 完成常规的实验报告内容。
2. 根据所画出的曲线,判别该电动阀的阀体是快开特性,等百分比特性还
是慢开特性。
第四节 上水箱(中水箱或下水箱)液位定值控制系统
一、实验目的
1.了解单闭环液位控制系统的结构与组成。
2.掌握单闭环液位控制系统调节器参数的整定。
3.研究调节器相关参数的变化对系统动态性能的影响。
二、实验设备
1.THJ-2 型高级过程控制系统装置
2.计算机、上位机 MCGS 组态软件、RS232-485 转换器 1 只、串口线 1 根
3.万用表1 只
三、实验原理
本实验系统的被控对象为上水箱,其液位高度作为系统的被控制量。
系统
的给定信号为一定值,它要求被控制量上水箱的液位在稳态时等于给定值。
由
图
3-7 上水箱液位定值控制结构图
反馈控制的原理可知,应把上水箱的液位经传感器检测后的信号作为反馈信号。
图 3-7 为本实验系统的结构图,图 3-8 为控制系统的方框图。
为了实现系统在
阶跃给定和阶跃扰动作用下无静差,系统的调节器应为 PI 或 PID。
图 3-8 上水箱液位定值控制方框图
四、实验内容与步骤
1.按图 3-7 要求,完成系统的接线。
2.接通总电源和相关仪表的电源。
3.打开阀 F1-1、F1-2、F1-6 和 F1-9,且把 F1-9 控制在适当的开度。
4.选用单回路控制系统实验中所述的某种调节器参数的整定方法整定好调
节器的相关参数。
5.设置好系统的给定值后,用手动操作调节器的输出,使电动调节阀给上
水箱打水,待其液位达到给定量所要求的值,且基本稳定不变时,把调节器切
换为自动,使系统投入自动运行状态。
6.启动计算机,运行 MCGS 组态软件软件,并进行下列实验:
1)当系统稳定运行后,突加阶跃扰动(将给定量增加 5%~15%),观察并
记录系统的输出响应曲线。
2)待系统进入稳态后,适量改变阀 F1-6 的开度,以作为系统的扰动,观
察并记录在阶跃扰动作用下液位的变化过程。
7.适量改变 PI 的参数,用计算机记录不同参数时系统的响应曲线。
五、实验报告
1.用实验方法确定调节器的相关参数。
2.列表记录,在上述参数下求得阶跃响应的动、静态性能指标。
3.列表记录,在上述参数下求得系统在阶跃扰动作用下响应曲线的动、静
态性能指标。
4.变比例度 δ 和积分时间 TI 对系统的性能产生什么影响?
第五节双容水箱液位定值控制系统
一、实验目的
1.通过实验,进一步了解双容对象的特性。
2.掌握调节器参数的整定与投运方法。
3.研究调节器相关参数的改变对系统动态性能的影响。
二、实验设备
1.THJ-2 型高级过程控制系统装置。
2.计算机、上位机 MCGS 组态软件、RS232-485 转换器 1 只、串口线 1 根
3.万用表一只
三、实验原理
本实验系统以中水箱与下水箱为被控对象,下水箱的液位高度为系统的被
图 3-9
双容液位定值控制系统结构图
控制量。
基于系统的给定量是一定值,要求被控制量在稳态时等于给定量所要
求的值,所以调节器的控制规律为 PI 或 PID。
本系统的执行元件既可采用电动
调节
图 3-10 双容液位定值控制系统方框图
阀,也可用变频调速磁力泵。
如果采用电动调节阀作执行元件,则变频调速磁
力泵支路中的手控阀 F2-4 或 F2-5 打开时可分别作为中水箱或下水箱的扰动。
图 3-9 为实验系统的结构图,图 3-10 为控制系统的方框图。
四、实验内容与步骤
1.图 3-9 所示,完成实验系统的接线。
2.接通总电源和相关仪表的电源。
3.打开阀 F1-1、F1-2、F1-7、F1-10 和 F1-11,且使 F1-10 的开度大于
F1-11 的开度。
4.用本章第一节实验中所述的临界比例度法或 4:
1 衰减振荡法整定调节
器的相关参数。
5.设置系统的给定值后,用手动操作调节器的输出,控制电动调节阀给中
水箱打水,待中水箱液位基本稳定不变且下水箱的液位等于给定值时,把调节
器切换为自动,使系统投入自动运行状态。
6.启动计算机,运行 MCGS 组态软件软件,并进行下列实验:
1)当系统稳定运行后,突加阶跃扰动(给定量增加 5%~15%),观察并记
录系统的输出响应曲线。
2)待系统进入稳态后,启运变频器调速的磁力泵支路,分别适量改变阀
F2-4 或阀 F2-5 的开度(加扰动),观察并记录被控制量液位的变化过程。
7.通过反复多次调节 PI 的参数,使系统具有较满意的动态性能指标。
用计
算机记录此时系统的动态响应曲线。
五、实验报告
1.用实验方法确定调节器的参数。
2.列表表示在上述参数下,系统阶跃响应的动、静态性能。
3.列表表示在上述参数下,系统在扰动作用于中水箱或下水箱时输出响应
的动态性能。
4.列表表示经调试后求得的调节器参数和相应系统阶跃响应的性能指标。
六、思考题
1.为什么本实验较上水箱液位定值控制系统更容易引起振荡?
如果达到同
样的动态性能指标,为什么本实验中调节器的比例度和积分时间常数均要比前
两个实验大?
2.你能说出下水箱的时间常数比中水箱时间常数大的原因吗?
第六节电动阀支路流量的定值控制系统
一、实验目的
1、了解单闭环流量定值控制系统的组成。
2、应用阶跃响应曲线法整定调节器的参数。
3、研究调节器中相关参数的变化对系统性能的影响。
二、实验设备
1、THJ-2 型高级过程控制系统实验装置
2、计算机、上位机 MCGS 组态软件、RS232-485 转换器 1 只、串口线 1 根
3、万用表 1 只
三、实验原理
图 3-19 单闭环流量控制系统的结构图
图 3-19 为单闭环流量控制系统的结构图。
系统的被控对象为管道,流经管道中
的液体流量 Q 作为被控制量。
基于系统的控制任务是维持被控制量恒定不变,
即在稳态时,它总等于给定值。
因此需把流量 Q 经检测变送后的信号作为系统
的反馈量,并采用 PI 调节器。
系统的控制方框图见图 3-20。
基于被控对象是一个时间常数较小的惯性环节,故本系统调节器的参数宜
用阶跃响应曲线法确定。
图 3-20 单闭环流量控制系统的方框图
四、实验内容与步骤
1、按图 3-19 要求,完成实验系统的接线。
2、接通总电源和相关仪表的电源。
3、按经验数据预先设置好副调节器的比例度。
4、打开阀 F1-1、F1-2、F1-8。
5、根据用阶跃响应曲线法求得的 K、T 和 τ,查本章中的表四确定 PI 调
节器的参数 δ 和周期 Ti。
6、设置流量的给定值后,手动操作调节器的输出,通过电动调节阀支路给
下水箱打水。
等流量 Q 趋于给定值且不变后,把调节器由手动切换为自动,使
系统进入自动运行状态。
7、打开计算机,运行 MCGS 组态软件,并进行如下的实验:
当系统稳定运行后,突加阶跃扰动(将给定量增加 5%~15%),观察并记录
系统的输出响应曲线。
8、通过反复多次调节 PI 的参数,使系统具有较满意的动态性能指标。
用
计算机记录此时系统的动态响应曲线。
五、实验报告
1、用实验方法整定 PI 调节器的参数。
2、作出比例 P 控制时,不同 δ 值下的阶跃响应曲线,并记下它们的余差
ess。
3、比例积分调节器(PI)控制
1) 在比例调节控制实验的基础上,加上积分作用“I”,即把“I”(积分)
设置为一参数,根据不同的情况,设置不同的大小。
观察被控制量能否回到原
设定值的位置,以验证系统在 PI 调节器控制下,系统的阶跃扰动无余差产生。
2) 固定比例 P 值(中等大小),然后改变调节器的积分时间常数 TI 值,观
察加入阶跃扰动后被调量的输出波形和响应时间的快慢。
3) 固定 TI 于某一中等大小的值,然后改变比例度 δ 的大小,观察加阶跃
扰动后被调量的动态波形和响应时间的快慢。
4、分析 δ 和 TI 值改变时,各给系统动态性能产生什么影响。
六、思考题
1、消除系统的余差为什么采用 PI 调节器,而不采用纯积分器?
2、为什么本系统调节器参数的整定要用阶跃响应曲线法,而不用临界比例
度法和阻尼振荡法?


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 过程 控制 实验 解析
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《曹刿论战》知识点归纳与专项阅读.docx
《曹刿论战》知识点归纳与专项阅读.docx
-
《安塞腰鼓》教学实录doc.docx
-
《传统文化的继承》同步练习5人教版必修3.docx
-
《富兰克林自传》读后感15篇.docx
-
《老龄产业发展现状问题与对策研究》.docx
-
《企业安全生产台帐》word版.docx
-
《》教案.docx
-
《公共营养师》基础部分试题及答案.docx
-
《基金科目二》试题及答案解析6.docx
-
《建筑业企业资质等级标准》建建82号.docx
-
《苦夏冯骥才》阅读答案3.docx
-
《普通化学》.docx
-
《安全标准化二级年度自评工作首次会议议程范文》.docx
-
《观刈麦范文》.docx
-
《常用文体写作》题库与答案.docx
-
《阿房宫赋》鉴赏教学实录5篇.docx
-
《蝉》教案.docx
-
《妇女维权倡议书3篇》.docx
-
《健康评估》考试试题及答案 客观题一套.docx
-
《三毛流浪记》阅读试题.docx
-
《食用菌工厂化栽培实施方案》.docx
-
《铁路机车操作规程》63页word.docx
-
《信息系统安全系统等级保护基本要求》二级三级等级保护要求比较.docx
-
《中小学德育工作指南》解读.docx
-
7古代东方国家及古希腊古罗马的学前教育可编辑修改word版.docx
-
《对幼儿行为习惯养成教育的研究》之结题报告.docx
-
《工笔人物》课程教学大纲.docx
-
《彩色的梦》教案.docx
-
《红红楼梦》31回至40回故事梗概.docx
-
《看上去很美》观后感.docx
-
《汽轮机本体检修》高级工题库完整.docx
-
《别了司徒雷登》.docx
-
超市工作计划范文6篇.docx
-
后厨的岗位职责.docx
-
《企业管理基础知识》全集.docx
-
初级中学教学任务方案.docx
-
成都市集体建设用地使用权登记补充规定.docx
-
湖边东路道路施工组织设计.docx
-
《时间简史》读后感字.docx
-
《俗世奇人》读后感15篇.docx
-
程序员试用期自我评价.docx
-
护理记录缺陷与干预策略.docx
-
初三班主任家长会发言稿.docx
-
沪教版小学语文三年级上22悉尼歌剧院课外课后练习和作文课课练及答案.docx
-
初中地理学习记忆口诀.docx
-
华中科技大学计算机考研复试机试题含代码资料.docx
-
《驿路梨花》说课稿获奖说课稿.docx
-
初中学校工作计划方案下载大全.docx
-
环境教育讲座与教案.docx
-
黄勐猛然青春的过瘾表达.docx
-
畜牧兽医工作总结.docx
