 基于LQR控制的主动悬架优化设计.docx
基于LQR控制的主动悬架优化设计.docx
- 文档编号:16080745
- 上传时间:2023-07-10
- 格式:DOCX
- 页数:11
- 大小:872.33KB
基于LQR控制的主动悬架优化设计.docx
《基于LQR控制的主动悬架优化设计.docx》由会员分享,可在线阅读,更多相关《基于LQR控制的主动悬架优化设计.docx(11页珍藏版)》请在冰点文库上搜索。
基于LQR控制的主动悬架优化设计
基于LQR控制的主动悬架优化设计
摘要:
根据汽车行驶性能的要求,本文以1/4车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG控制器进行设计,并运用MATLAB/simulink对汽车动力学模型进行仿真。
结果表明:
具有LQG控制器的主动悬架对车辆行驶平稳性和乘坐舒适性的改善有良好效果。
关键词:
主动悬架;被动悬架;LQG控制器引言
悬架系统是汽车的重要部件,对于汽车的平顺性、操稳性和安全性都有着重要的影响,而主动悬架是悬架发展的必然方向。
控制器的设计对于主动悬架性能的发挥起着重要的作用,本文中以1/4汽车主动悬架为研究对象,建立汽车动力学模型和设计LQG控制器算法,应用Matlab/Simulink进行汽车系统的控制仿真。
1基于线性二自由度汽车模型的建立
1.1被动悬架系统的建立
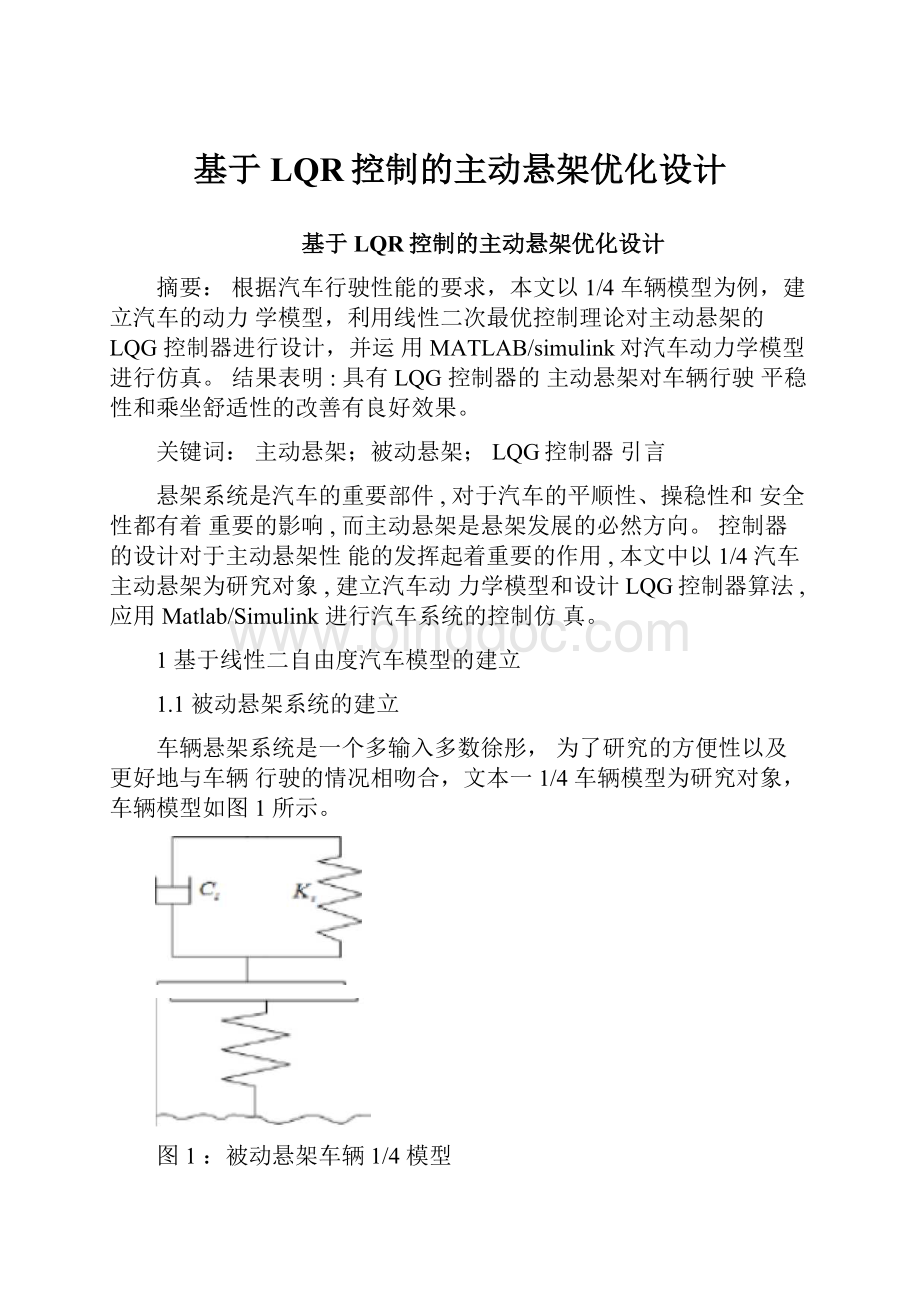
车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4车辆模型为研究对象,车辆模型如图1所示。
图1:
被动悬架车辆1/4模型
根据图1所示,建立一个被动悬架车辆1/4模型,首先建立运动微分方程:
mbxbKs(xbxw)Cs(xbxw)
mwxwKt(xwxg)Ks(xbxw)Cs(xbxw)
整理得:
式中:
Cs为悬架阻尼,Ks为悬架刚度。
选取状态变量和输入向量为:
则可将系统运动方程及路面激励写成状态空间矩阵形式,即:
XAXBU
Cs
Cs
Ks
Ks
0
mb
mb
mb
mb
Kt
Cs
Cs
Ks
KsKs
A
B
mw
mw
mw
mw
mw
0
1
0
0
0
0
0
1
0
0
其中,A为状态矩阵,B为输入矩阵,其值如下:
将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:
将性能指标项写为状态变量以及输入信号的线性组合形式,即:
YCXDU
其中:
图2:
被动悬架车辆1/4模型
根据图2所示,建立一个主动悬架车辆1/4模型,首先建立运动微分方程:
3)
mwxwKs(xbxw)Kt(xgxw)UgmbxbKs(xbxw)Ug
Ks
Ks
1
0
0
0
mb
mb
mb
Ks
KtKs
Kt
1
0
0
B
mw
mw
mw
mw
1
0
0
0
0
0
0
1
0
0
0
0
此时矩阵状态矩阵为:
A
00
0
mbmb
mb
0001
D
10
0011
00
C
1.3路面模型的建立
文利用白噪声信号为路面输入激励,
xg(t)2f0xg(t)2G0U0w(t)
其中,f0为下截止频率,Hz;G0为路面不平度系数,m3/cycle;U0为前进车速,m/sec;w为均值为零的随机输入单位白噪声。
上式表明,路面位移可以表
XroadAroadXFroadW
YroadCroadX
Xroadxg,Aroad2f0,Broad2G0U0,Croad1;D=0;考虑路面为普通路面,路面不平系数G0=5e-6m3/cycle;车速U0=20m/s;建模中,路面随机白噪声可以用随机数产生(RandomNumber)或者有限带宽白噪声(Band-LimitedWhite
Noise)来生成。
本文噪声已经由TIN4文件已经给出,运用MATLAB/simulink建立仿真模型如下:
图3:
路面模型
2性能指标的确定
LQG控制设计中的目标性能指数J即车身加速度、悬架动行程和位移的加权平方和的积分值,表示如下:
2
1T222
JlimT0[q1(xwxg)q2(xbxw)q3xb]dt
为了据此求解状态反馈增益,必须用状态变量以及输入变量来表示上式:
1TTTT
JlimXTQXUTRU2XTNU]dt
其中Q:
对应于状态变量的权重矩阵;R:
约束输入信号大小的权重矩阵;N:
耦合项。
对于q1,q2,q3表达的性能函数,可以整理为:
2
1T222
Jlim0[q1(xwxg)2q2(xbxw)2q3xb]dt
TT0
YTQ0Y(CXDU)TQ0(CXDU)
QRN
XTCTQ0CXUTDTQ0DUXTCTQ0DUUTDTQ0CX
因此可以求出Q、R、N:
利用MATLAB函数LQR来计算状态反馈K:
[KSE]lqr(A,B,Q,R,N)
其中,K为最优状态反馈矩阵;S为Riccati方程解;E为系统特征值。
因此
可以得到主动控制力U=-KX。
U(k1xbk2xwk3xbk4xwk5xg)
加权系数的选取决定悬架的性能,如果车身垂直加速度加权系数较大,则可以提高乘坐的舒适性;若轮胎动位移的加权系数较大,则车辆的操纵稳定性较好。
3仿真分析
车辆的各个参数会在附录程序中给出,根据要求建立simulink模型为:
图4:
simulink模型
图5:
车身加速度对比
图7:
轮胎位移对比
4总结
本文首先建立了二自由度1/4车体模型。
并运用线性二次最优化理论设计了车辆主动悬架的LQG控制器。
借助MATLA/BSimulink软件进行仿真分析。
分析结果表明,所设计的最优主动悬架显著地降低了车身的垂向振动加速度。
与被动悬架相比,采用LQG控制器的悬架动行程和车轮动位移也都得到了良好的改善。
所以基于线性二次最优控制理论进行的主动悬架LQG控制器的设计是行之有效的。
'onesided');%生成高斯白噪声功率谱密度
%路面输入状态空间
A=-2*pi*f0;
B=2*n0*pi*sqrt(G0*U0);
C=1;
D=0;
%被动悬架状态空间
A1=[-Cs/Mb,Cs/Mb,-Ks/Mb,Ks/Mb;Cs/Mw,-Cs/Mw,Ks/Mw,-(Ks+Kt)/Mw;1,0,0,0;0,1,0,0];
B1=[0;Kt/Mw;0;0];
C1=[-Cs/Mb,Cs/Mb,-Ks/Mb,Ks/Mb;0,0,0,1;0,0,1,-1];
D1=[0;-1;0];
%主动悬架状态空间
%A2=[0,0,-Ks/Mb,-Ks/Mb;0,0,-Ks/Mw,-(Kt+Ks)/Mw;1,0,0,0;0,1,0,0];
A2=A1;
B2=[0,1/Mb;Kt/Mw,-1/Mw;0,0;0,0];
%输出三个
C2=[0,0,-Ks/Mb,Ks/Mb;0,0,0,1;0,0,1,-1];
D2=[0,1/Mb;-1,0;0,0];
%数出四个
C3=diag([1,1,1,1]);
D3=[0,0;0,0;0,0;0,0];
%Q、R、N
Q0=[q3,0,0;0,q1,0;0,0,q2];
Q=[0,0,0,0;0,0,0,0;0,0,Ks*Ks*q3/(Mb*Mb)+q2,-Ks*Ks*q3/(Mb*Mb)-q2;0,0,-Ks*Ks*q3/(Mb*Mb)-q2,Ks*Ks*q3/(Mb*Mb)+q1+q2];
R=[q1,0;0,q3/(Mb*Mb)];
N=[0,0;0,0;0,-Ks*q3/(Mb*Mb);-q1,Ks*q3/(Mb*Mb)];
[K,S,E]=lqr(A2,B2,Q,R,N);
K=K(2,:
)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 LQR 控制 主动 悬架 优化 设计
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《曹刿论战》知识点归纳与专项阅读.docx
《曹刿论战》知识点归纳与专项阅读.docx
-
《安塞腰鼓》教学实录doc.docx
-
《传统文化的继承》同步练习5人教版必修3.docx
-
《富兰克林自传》读后感15篇.docx
-
《老龄产业发展现状问题与对策研究》.docx
-
《企业安全生产台帐》word版.docx
-
《》教案.docx
-
《公共营养师》基础部分试题及答案.docx
-
《基金科目二》试题及答案解析6.docx
-
《建筑业企业资质等级标准》建建82号.docx
-
《苦夏冯骥才》阅读答案3.docx
-
《普通化学》.docx
-
《安全标准化二级年度自评工作首次会议议程范文》.docx
-
《观刈麦范文》.docx
-
《常用文体写作》题库与答案.docx
-
《阿房宫赋》鉴赏教学实录5篇.docx
-
《蝉》教案.docx
-
《妇女维权倡议书3篇》.docx
-
《健康评估》考试试题及答案 客观题一套.docx
-
《三毛流浪记》阅读试题.docx
-
《食用菌工厂化栽培实施方案》.docx
-
《铁路机车操作规程》63页word.docx
-
《信息系统安全系统等级保护基本要求》二级三级等级保护要求比较.docx
-
《中小学德育工作指南》解读.docx
-
7古代东方国家及古希腊古罗马的学前教育可编辑修改word版.docx
-
《对幼儿行为习惯养成教育的研究》之结题报告.docx
-
《工笔人物》课程教学大纲.docx
-
《彩色的梦》教案.docx
-
《红红楼梦》31回至40回故事梗概.docx
-
《看上去很美》观后感.docx
-
《汽轮机本体检修》高级工题库完整.docx
-
《别了司徒雷登》.docx
-
公共管理高级研修班学习体会(共4页)2600字.docx
-
公司员工素质拓展培训心得(共2页)1000字.docx
-
构建和谐的海关人际关系是和谐海关建设的基石(共8页)4900字.docx
-
关于党员读书心得体会_4篇(共7页)4300字.docx
-
关于学习的名词解释(共18页)11600字.docx
-
光棍节策划书大学生(共3页)1400字.docx
-
国营企业职工劳动合同书范本(共4页)2300字.docx
-
合作开发房地产合同范本3篇(共9页)5900字.docx
-
护士心得(共2页)700字.docx
-
机关干部学习心得体会范文(共3页)1700字.docx
-
计划生育干部转变干部作风心得体会_1篇(共3页)1800字.docx
-
技术转让合同范本模板(共11页)7200字.docx
-
家长会的收获(共3页)1400字.docx
-
见习期满个人自我鉴定(共7页)4600字.docx
-
交通运输系统党的群众路线教育实践活动讲话(共2页)1100字.docx
-
教师培训项目管理的学习心得体会(共2页)900字.docx
-
教师信息技术培训体会(共2页)700字.docx
-
小学纪念九一八事变85周年主题活动方案(共2页)1100字.docx
-
教育技术培训心得(共3页)1700字.docx
