 在m文件中编写PID控制算法Word下载.doc
在m文件中编写PID控制算法Word下载.doc
- 文档编号:8446216
- 上传时间:2023-05-11
- 格式:DOC
- 页数:3
- 大小:23.50KB
在m文件中编写PID控制算法Word下载.doc
《在m文件中编写PID控制算法Word下载.doc》由会员分享,可在线阅读,更多相关《在m文件中编写PID控制算法Word下载.doc(3页珍藏版)》请在冰点文库上搜索。
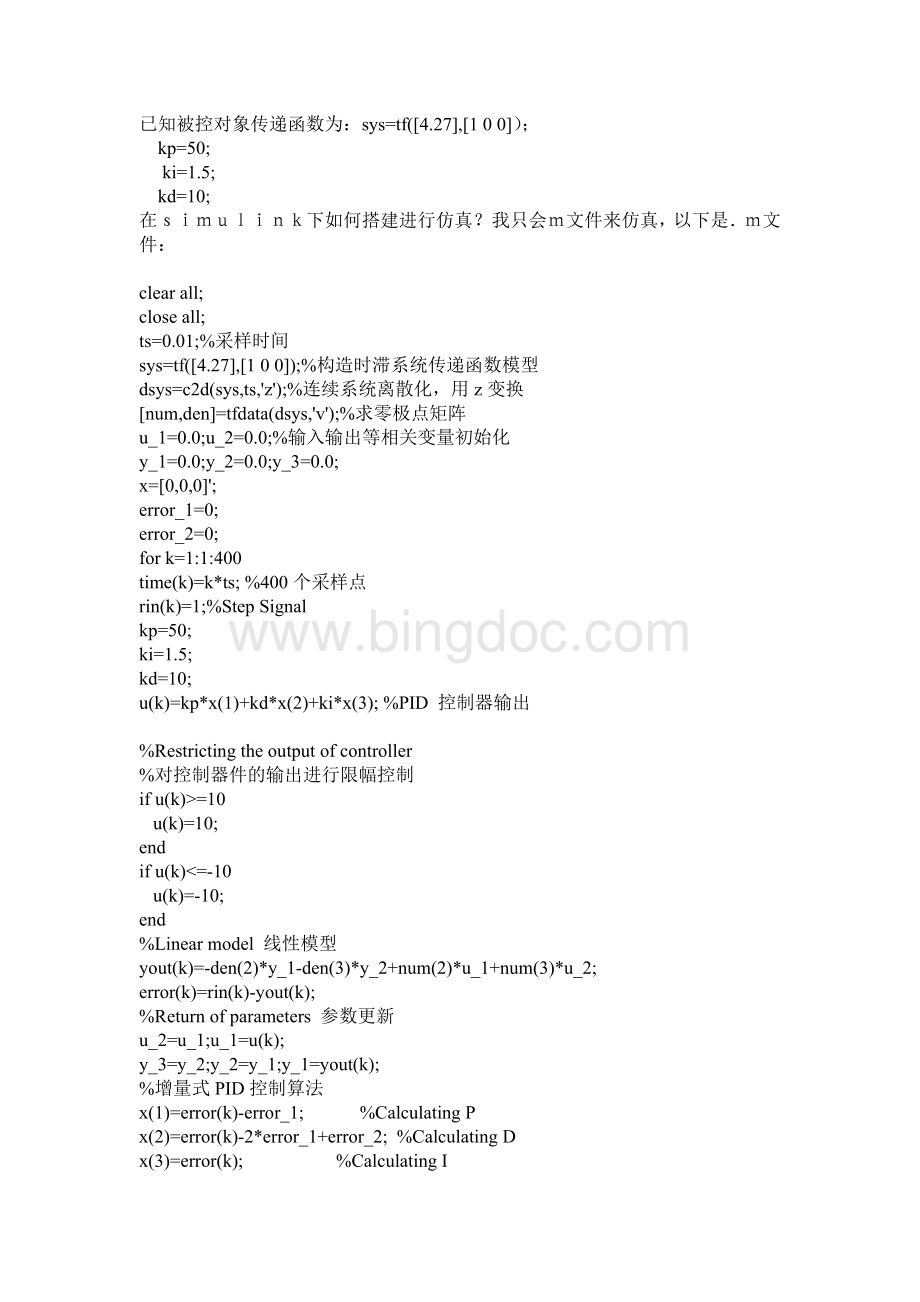
z'
);
%连续系统离散化,用z变换
[num,den]=tfdata(dsys,'
v'
%求零极点矩阵
u_1=0.0;
u_2=0.0;
%输入输出等相关变量初始化
y_1=0.0;
y_2=0.0;
y_3=0.0;
x=[0,0,0]'
;
error_1=0;
error_2=0;
fork=1:
1:
400
time(k)=k*ts;
%400个采样点
rin(k)=1;
%StepSignal
kp=50;
ki=1.5;
kd=10;
u(k)=kp*x
(1)+kd*x
(2)+ki*x(3);
%PID控制器输出
%Restrictingtheoutputofcontroller
%对控制器件的输出进行限幅控制
ifu(k)>
=10
u(k)=10;
end
ifu(k)<
=-10
u(k)=-10;
%Linearmodel线性模型
yout(k)=-den
(2)*y_1-den(3)*y_2+num
(2)*u_1+num(3)*u_2;
error(k)=rin(k)-yout(k);
%Returnofparameters参数更新
u_2=u_1;
u_1=u(k);
y_3=y_2;
y_2=y_1;
y_1=yout(k);
%增量式PID控制算法
x
(1)=error(k)-error_1;
%CalculatingP
x
(2)=error(k)-2*error_1+error_2;
%CalculatingD
x(3)=error(k);
%CalculatingI
error_2=error_1;
error_1=error(k);
figure
(1);
plot(time,rin,'
b'
time,yout,'
k'
xlabel('
无时滞环节的控制系统PID仿真time(s)'
),ylabel('
rin,yout'
gridon;
figure
(2);
plot(time,u,'
time(s)'
u'
最近让做一个一级倒立摆数字PID控制
这是我参考了别人的程序的基础上,自己编写的。
可是当我输入不同的kp时,没有出现振荡的情况。
大家帮我看看,这个程序哪出了问题呢?
l=1;
g=9.8;
ts=0.001;
%小车的位移为输入,角度为输出时的差分方程表示
sys=tf([300],[-4*l03*g]);
[numden]=tfdata(dsys,'
%小车的受力为输入,位移为输出时的差分方程表示
sys1=tf([-4*l03*g],[-2.202.1*g0]);
dsys1=c2d(sys1,ts,'
[num1den1]=tfdata(dsys1,'
%由冲击力产生的小车位移,此为系统的干扰也是初始位移输入
k=1:
1000;
x0=impz(num1,den1,k);
f_1=0;
f_2=0;
x_1=0;
x_2=0;
uu_1=x0
(1);
uu_2=x0
(2);
theta_1=0;
theta_2=0;
s=[000]'
e_1=0;
e_2=0;
kp=0;
ki=0;
kd=0;
1000
rin(k)=0.0;
%期望输入
%选用的是PID增量算法
detau(k)=kp*s
(1)+kd*s
(2)+ki*s(3);
u(k)=u_1+detau(k);
=10
uu(k)=u(k)+x0(k);
theta(k)=-den
(2)*theta_1-den(3)*theta_2+num
(1)*uu(k)+num
(2)*uu_1+num(3)*uu_2;
e=rin(k)-theta(k);
%e表示误差
uu_2=uu_1;
uu_1=uu(k);
theta_2=theta_1;
theta_1=theta(k);
s
(1)=e-e_1;
s
(2)=e-2*e_1+e_2;
s(3)=e;
e_2=e_1;
e_1=e;
holdon;
plot(time,theta,'
r'
time,rin,'
)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 文件 编写 PID 控制 算法
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 二年级下册数学专项练习-应用题1.docx
二年级下册数学专项练习-应用题1.docx
-
2015年小学六年级英语语法及习题.doc
-
福师2018.8《小学教育管理考核题》答案.doc
-
《西游记》课外阅读汇报课教案.doc
-
初中美术《藏书票》说课稿.doc
-
《乡愁》教学设计与反思.doc
-
17年语文龙岩质检卷(含答案).doc
-
A4作文稿纸模板.doc
-
IBMX5服务器设置流程Word文件下载.docx
-
IE部岗位职责文档格式.doc
-
IPV4向IPV6平滑过渡毕业论文Word下载.doc
-
IP数据包的捕获与分析设计报告Word文档格式.docx
-
IT服务外包及报价文档格式.doc
-
IT项目管理的六种错误思维Word下载.doc
-
IT行业服务话术及处理技巧Word文件下载.docx
-
Java仓库管理系统报告文档格式.doc
-
Java开发中的种设计模式Word格式.doc
-
浙江传媒学院笔试真题.doc
-
欧洲及北美动画史.doc
-
粮食仓储管理制度.doc
-
(完整版)《那个星期天》习题和答案.docx
-
(完整版)机房巡检表.doc
-
小升初数学全真模拟试卷1.doc
-
2022最新教科版五年级下册科学全册教案Word文档下载推荐.docx
-
机械加工件检验标准Word文档格式.docx
-
小升初数学衔接教材北师版学生版.doc
-
初中美术_文明之光——瓷器教学设计学情分析教材分析课后反思Word格式文档下载.docx
-
围堰施工专项施工安全方案文档格式.doc
 中考语文综合探究专题复习用.ppt
中考语文综合探究专题复习用.ppt
-
种植养护实施方案.docx
-
小学数学研究性学习设计方案_四年级数学_数学_小学教育_教育专区.doc
-
综合实践活动《鸟巢创意搭建》教学设计.docx
-
PEP四年级英语下册Unit5基础测试卷文档格式.doc
-
开心英语小学英语语法知识及小升初练习题Word格式.docx
-
考研英语翻译基础课程讲义Word格式文档下载.docx
-
客户服务白皮书文档格式.docx
-
拉萨市初中地理居民与聚落练习题附答案Word文件下载.docx
-
冷却塔环基及人字柱施工方案Word文件下载.docx
-
励志禅者齐白石是性灵画派开创者模板Word文件下载.docx
-
辽宁大连市中考英语试题word版无答案Word格式文档下载.docx
-
临床血液学检验急性髓细胞白血病练习题Word下载.docx
-
硫磺回收装置试车方案Word格式.docx
-
论冯梦龙三言中的美男子形象Word下载.docx
-
旅游英语Word文档下载推荐.docx
-
安徽省宿州市埇桥区学年七年级下学期第三次月考英语试题word含听力答案版Word文档格式.docx
-
机械加工设备工艺及一般知识Word下载.docx
-
While的用法析与练Word文档下载推荐.doc
-
基础数字地形图产品检验Word下载.docx
-
安徽省初中毕业英语考纲词汇表Word文档格式.doc
-
基于FPGA的洗衣机控制器 verilog hdl 语言描述Word文件下载.docx
-
安全施工保证措施文档格式.docx
