 基于51单片机智能小车循迹程序.docx
基于51单片机智能小车循迹程序.docx
- 文档编号:3553100
- 上传时间:2023-05-06
- 格式:DOCX
- 页数:14
- 大小:61.43KB
基于51单片机智能小车循迹程序.docx
《基于51单片机智能小车循迹程序.docx》由会员分享,可在线阅读,更多相关《基于51单片机智能小车循迹程序.docx(14页珍藏版)》请在冰点文库上搜索。
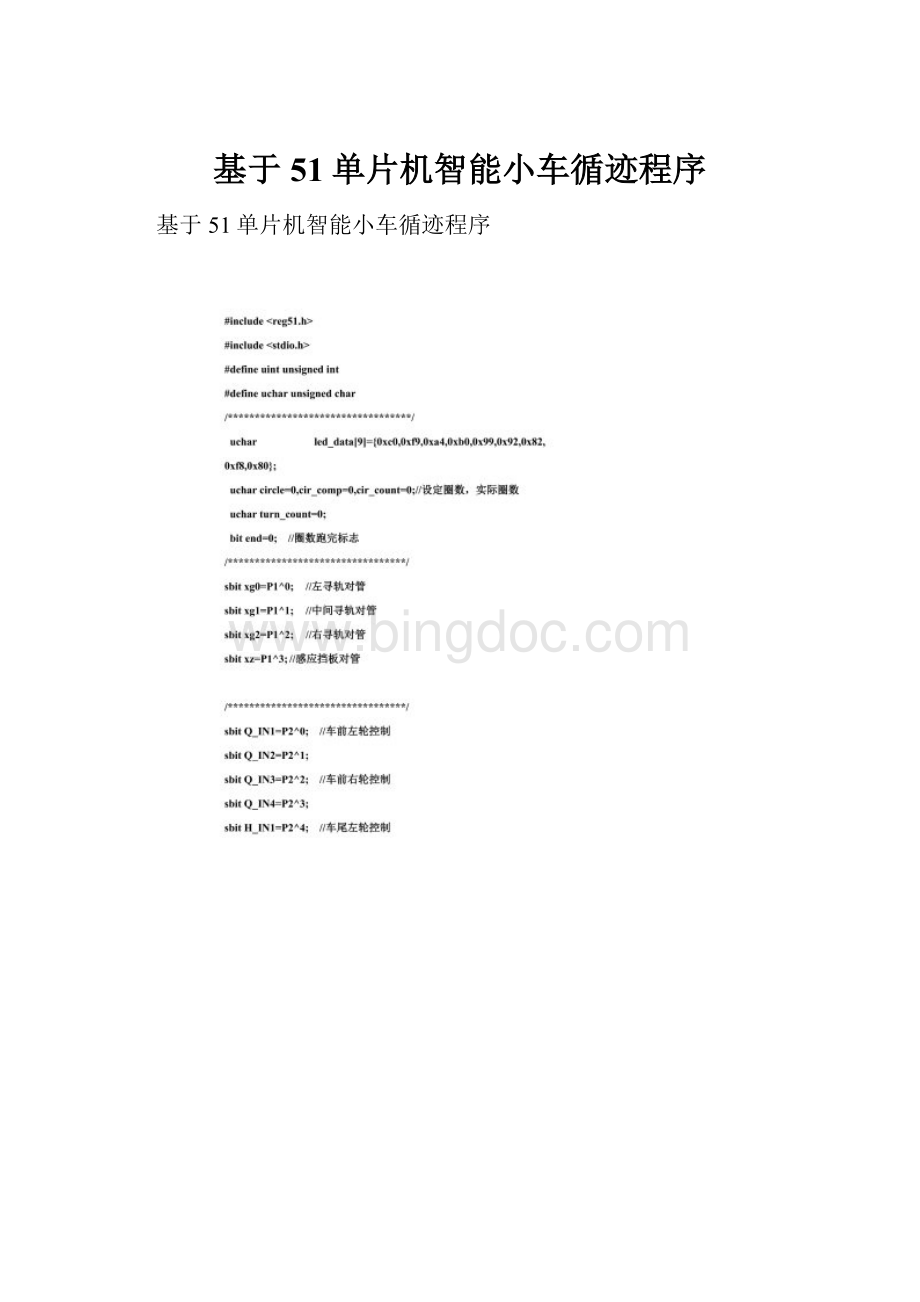
基于51单片机智能小车循迹程序
基于51单片机智能小车循迹程序
#defineblack_time1500//过黑线的时间
#definecorrect_l_time700//左矫正时间
#definecorrect_r_time700//右矫正时间
#definehou_time200
/***************************************/
ucharq_duty_l,q_duty_r,h_duty_l,h_duty_r,//车前后左右轮占空比
i=0,j=0,k=0,m=0;
/**************************************/
voiddelay_cir(uintn)
{
ucharx;
while(n--)
{
for(x=0;x<250;x++);
};
}
/***********************************/
voiddelay(uintct)//延时函数
{
uintt;
t=ct;
while(t--);
}
/***************************************/
voidstraight()//直走
{
q_duty_l=stra_q_l;
q_duty_r=stra_q_r;
h_duty_l=stra_h_l;
h_duty_r=stra_h_r;
Q_IN1=1;
Q_IN2=0;
Q_IN3=1;
Q_IN4=0;
H_IN1=1;
H_IN2=0;
H_IN3=1;
H_IN4=0;
}
/***************************************/
voidhoutui()//后退
{
q_duty_l=stra_q_l;
q_duty_r=stra_q_r;
h_duty_l=stra_h_l;
h_duty_r=stra_h_r;
Q_IN1=0;
Q_IN2=1;
Q_IN3=0;
Q_IN4=1;
H_IN1=0;
H_IN2=1;
H_IN3=0;
H_IN4=1;
}
/***************************************/
voidturn_left()//左转
{
q_duty_l=turn_q_l;
q_duty_r=turn_q_r;
h_duty_l=turn_h_l;
h_duty_r=turn_h_r;
Q_IN1=0;//左轮反转
Q_IN2=1;
H_IN1=0;
H_IN2=1;
Q_IN3=1;//右轮正转
Q_IN4=0;
H_IN3=1;
H_IN4=0;
delay(turnl_time);
}
/***********************************/
voidturn_right()//右转
{
q_duty_l=turn_q_l;
q_duty_r=turn_q_r;
h_duty_l=turn_q_l;
h_duty_r=turn_q_r;
Q_IN1=1;//左轮正转
Q_IN2=0;
H_IN1=1;
H_IN2=0;
Q_IN3=0;//右轮反转
Q_IN4=1;
H_IN3=0;
H_IN4=1;
delay(turnr_time);
}
/**************************************************/
voidturn_round()//原地掉头
{
q_duty_l=turn_q_l;
q_duty_r=turn_q_r;
h_duty_l=turn_h_l;
h_duty_r=turn_h_r;
Q_IN1=0;//左轮反转
Q_IN2=1;
H_IN1=0;
H_IN2=1;
Q_IN3=1;//右轮正转
Q_IN4=0;
H_IN3=1;
H_IN4=0;
delay(dt_time);
}
/******************************************************/
voidover()//小车停止
{
Q_IN1=0;
Q_IN2=0;
Q_IN3=0;
Q_IN4=0;
H_IN1=0;
H_IN2=0;
H_IN3=0;
H_IN4=0;
}
/*****************************************************/
voidcorrect_right()//左偏,向右矫正
{
q_duty_l=turn_q_l;
q_duty_r=turn_q_r;
h_duty_l=turn_q_l;
h_duty_r=turn_q_r;
Q_IN1=1;//左轮正转
Q_IN2=0;
H_IN1=1;
H_IN2=0;
Q_IN3=0;//右轮反转
Q_IN4=1;
H_IN3=0;
H_IN4=1;
delay(correct_r_time);
}
voidcorrect_left()//右偏,向左矫正
{
q_duty_l=turn_q_l;
q_duty_r=turn_q_r;
h_duty_l=turn_h_l;
h_duty_r=turn_h_r;
Q_IN1=0;//左轮反转
Q_IN2=1;
H_IN1=0;
H_IN2=1;
Q_IN3=1;//右轮正转
Q_IN4=0;
H_IN3=1;
H_IN4=0;
delay(correct_l_time);
}
/*************************************/
voidxunji()
{
if(xg1==1)
{
turn_count++;
over();
delay(over_time);
if(turn_count==1)
{straight();
delay(black_time);
}
else
if(turn_count==2)
{houtui();
delay(hou_time);
turn_left();
}
else
if(turn_count==3)
{houtui();
delay(hou_time);
turn_right();
}
else
if(turn_count==4)
{houtui();
delay(hou_time);
turn_right();
}
else
if(turn_count==5)
{straight();
delay(black_time);
}
else
if(turn_count==6)
{houtui();
delay(hou_time);
turn_right();
}
else
if(turn_count==7)
{houtui();
delay(hou_time);
turn_right();
straight();
delay(back_time);
turn_left();
}
else
if(turn_count==8)
{straight();
delay(black_time);
}
else
if(turn_count==9)
{houtui();
delay(100);
turn_round();
}
if(turn_count>=9)
{turn_count=0;
cir_count++;
circle--;
}
if(cir_count==cir_comp)
{end=1;
over();
delay(500);
}
}
else
if((xg0==0)&&(xg1==0)&&(xg2==0))
{straight();}
else
if((xg0==1)&&(xg1==0)&&(xg2==0))
{over();
delay(over_time);
houtui();
delay(hou_time);
correct_right();
}//左偏,向右矫正
else
if((xg0==0)&&(xg1==0)&&(xg2==1))
{over();
delay(over_time);
houtui();
delay(hou_time);
correct_left();
}//右偏,向左矫正
}
/***********************************************/
voidint0(void)interrupt0//中断圈数设定
{
EX0=0;
delay_cir(250);
circle++;
cir_comp++;
if(circle>8)
{circle=0;
cir_comp=0;
}
P0=led_data[circle];
EX0=1;
}
/*************************************/
voidtime1(void)interrupt3//T1溢出中断,电机调速
{
i++;
j++;
k++;
m++;
if(i Q_ENA=1; elseQ_ENA=0; if(i>100) {Q_ENA=1;i=0;} if(j Q_ENB=1; elseQ_ENB=0; if(j>100) {Q_ENB=1;j=0;} if(k H_ENA=1; elseH_ENA=0; if(k>100) {H_ENA=1;k=0;} if(m H_ENB=1; elseH_ENB=0; if(m>100) {H_ENB=1;m=0;} P0=led_data[circle]; TH1=0XFF; TL1=0XF6; } /*************************************/ voidmain() { P0=led_data[circle]; P1=0xFF; P1=0XFF;//P1口做输入 P2=0X00;//P2口初始化,小车禁止 P3=0XFF; TMOD=0X11;//T0,T1,工作方式1 TH1=0XFF;//T1中断一次10US TL1=0XF6; TR1=1; EX0=1; ET1=1; EA=1; while (1) { while((xz==1)&&(end! =1))//无挡板,扫描对管,前进 { xunji(); }; }; }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 51 单片机 智能 小车 程序
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
-
证券投资顾问业务暂行规定.docx
-
知识产权法司法考试历年真题及答案解析.docx
-
职业道德的复习重点.docx
-
志愿者活动心得精选多篇.docx
-
治理雾霾应重视大气静电学说.docx
-
中国成人脑死亡判定标准与操作规范第二版.docx
-
中国名牌产品申请表.docx
-
中国纸板产业深度调研及产业投资评估报告.docx
-
中考化学考点分类解析导学案14第3讲碳和碳的氧化物1碳单质的物理性质和用途.docx
-
中学学年度第二学期学校工作计划.docx
-
中英文安全标语word版本 26页.docx
-
重庆市高考英语试题.docx
-
注册安全工程师《安全生产管理知识》真题及答案.docx
-
装机必备硬件基础知识再接再厉完成装机.docx
-
子部.docx
-
总结范文骨干教师培训总结15篇.docx
-
最新 Marlin固件全中文解析.docx
-
最新部编版三年级语文上册第24课《司马光》教学设计.docx
-
最新二年级数学上册寒假作业全面系统146.docx
-
最新猴年祝贺词大全 精品.docx
-
最新入党思想报告3000字范文思想汇报文档五篇.docx
-
《OTL功率放大器的制作与调试》项目教学设计方案.docx
-
《化学方程式》单元检测2.docx
-
中考语文阅读精品题.docx
-
工伤司法鉴定标准是怎样的.docx
-
公共事务管理硕士在职专班入学研究计画书.docx
-
公考必备《行测》数量关系题库.docx
-
股票技术指标详解二.docx
-
人教版数学六下第二单元《百分数二》word教案精品教案.docx
-
简大型机房建设系统全套设计方案.docx
-
建筑工程基础加固与纠偏处理应用探讨.docx
-
数据库课程设计仓库管理系统分析.docx
-
师德试题1答案.docx
-
连续梁施工的关键技术控制.docx
-
英汉互译补充习题 (1).docx
-
国美ERP分析案例.docx
-
粮食行政复议规定.docx
-
智能换电柜项目操作使用手册版本V1.0.doc
-
安全生产应急预案 2.docx
-
林火复习题整理资料.docx
-
施工升降机.docx
-
施工人员个人年终工作总结5篇.docx
-
临清市房地产管理处预算公开.docx
-
施工现场管理方案.docx
-
施工现场临时用电安全生产检查.docx
-
安阳市物业管理办法试行.docx
-
安全教育试卷装载机司机.doc
-
刘晓斌的论文.docx
-
施工扬尘污染防治方案最终版.docx
-
六年级下册单词课文中译英上海版牛津英语.docx
