 《控制理论》试题库docx.docx
《控制理论》试题库docx.docx
- 文档编号:12864870
- 上传时间:2023-06-08
- 格式:DOCX
- 页数:19
- 大小:215.26KB
《控制理论》试题库docx.docx
《《控制理论》试题库docx.docx》由会员分享,可在线阅读,更多相关《《控制理论》试题库docx.docx(19页珍藏版)》请在冰点文库上搜索。
《控制理论》试题库docx
第二章:
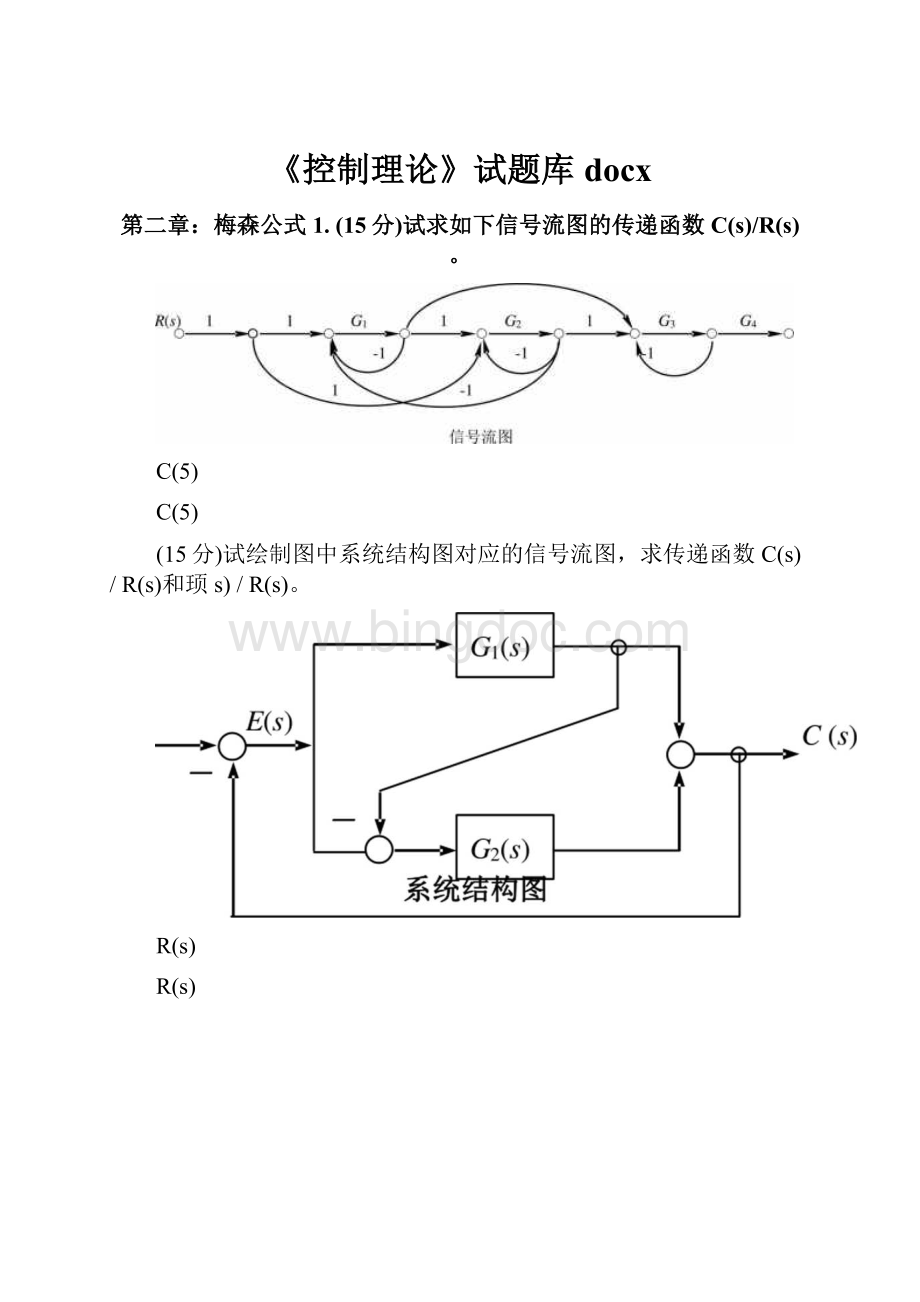
梅森公式1.(15分)试求如下信号流图的传递函数C(s)/R(s)。
C(5)
C(5)
(15分)试绘制图中系统结构图对应的信号流图,求传递函数C(s)/R(s)和顼s)/R(s)。
R(s)
R(s)
(13分)试绘制下面系统结构图对应的信号流图,并用梅逊增益公式求传递函数C(s)/R(s)
1.(16分)某系统结构图如图3(。
)所示
(1)画出图3(。
)的对应的信号流图,计算闭环传递函数中(s);
(2)确定图30)传函G(s),使得(。
)与0)中从R(s)到丫(s)的闭环传递函数一致;
(3)令〃=1,试确定系统的类型,并计算与之对应的稳态误差系数。
图3
图3
(。
)
0)
(15分)设系统如图所示,其中Gi(s)=1,G2(s)=一白一,输入信号r(t)=l(t),试求系统的ss+a
脉冲传递函数G(z)和输出的z变换C(z)o
已知z变换形式的公式为勾1仕)]=2,Z[i]=-^―,Z[-^-]=aZaTz-1sz-1s+az-e
r(t)
R(z)
4.(15分)离散系统结构图如图6所示,采样周器7=Is。
试分别写出开环脉冲传函G⑵和闭环脉冲传函
中(Z),并分析系统稳定性。
其中,Z上
S
中(Z),并分析系统稳定性。
其中,Z上
S
1
s+a
1
7+i
图6
27.(10分)设离散系统如图所示,其中G(s)=10/s(s+1),H(s)=1,T=1。
试分析该系统的
稳定性。
已知z变换形式的公式为Z[!
]=二,Z[—]=一Wsz—1s+。
z—g"
火)
:
—尸(g(z)
a
E
(2)
风Z)
如)
eV)
H(s)
28.(10分)设系统如图所示,输入信号r(t>l(t),试求系统的脉冲传递函数G(z)和输出的
z变换C(z)o
已知Z变换形式的公式为Z[l(t)]=
z-1
已知Z变换形式的公式为Z[l(t)]=
z-1
,Z[1]=土,Z[^-]=
sz-1s+az-e
/
T=2s
/
T=2s
5
40s+1
C(5)
5、(10分)设系统如图所示,辎入信号r(,)二l。
5、(10分)设系统如图所示,辎入信号r(,)二l。
来系统的闭卬脉冲传递函数⑦⑵和输出的
z变换C(z)o
已知z变换形式的公式为Z[1Q)]=二,Z[i]=—,Z[—^—]=—W
z-lsz-1s+az-ea/c(kT)
r
6、(10分)设闭环离散系统结构图如图所示,其中,
6、(10分)设闭环离散系统结构图如图所示,其中,
出)4"=洁时3)=1,
试求该系统闭环脉冲传递函数(设采样周期T=l)o
[提示:
Z",)]=M,Z*土,Z点=*,Z[白=片
G(s)
G(s)
E;(s)
第八章:
状态空间方程、可观测性、可控性、稳定性判断
第八章:
状态空间方程、可观测性、可控性、稳定性判断
7、(15分)已知某连续
7、(15分)已知某连续
系统的微分方程为
乌+5竺+8四+4「以+3知〃dt']dfdtdt'dt
试求系统的动态方程,并判断其可控性和可观测性。
7、(15分)已知某单位反馈控制系统的开环传递函数
G(s)=
试确定闭环控制系统的状态空间模型。
6、(15分)已知某连续系统的微分方程为
dy顼~)ldy/ducd_u…du“
—+2—+5—+6^=2—+3—+11——+13〃dtdtdtdtdrdt
试求系统的动态方程,并判断其可控性和可观测性。
六、(10分)已知系统的动态方程如下。
y=200站I—*
其中,a,b为实常数,分别写出满足下列稳定性要求时,a,b应满足的条件。
(1)系统渐进稳定。
(2)系统BIB0稳定。
2.(10分)绘制下面系统结构图对应的信号流图,并用梅森公式求系统的传递函数C(s)/R(s)和误差传递函数E(s)/R(s)o
2、用梅逊公式求图示系统的传递函数C(s)/*(s)。
2、用梅逊公式求图示系统的传递函数C(s)/*(s)。
2.(15分)试绘制图2系统结构图对应的信号流图,并求传递函数C(s)/R(s)。
图2系统结构图(10分)求图1所示系统的传递函数C(s)/R(s)。
R(s)
aG4(S)
图1系统方框图
第三章:
二阶性能,劳斯判据,稳态误差。
3.(15分)设系统结构图如图所示,若要求系统具有性能指标。
〃=。
%=25%,,〃=l(s),试确定系统参数K和丁,并计算单位阶跃响应的特征量力,tr和赤o
14-TsV
14-TsV
3、
控制系统结构图下图为简化的飞行控制系统结构图,试选择参数K1和Kt,使系统的刃〃=6,&=1。
R(s).八
s(s+0.8)|
C(s)
J*IV1
Kts
<
(10分)系统结构图如下所示,要求系统阻尼比&二0.6,试确定K值并计算动态性能指标(tp,。
%,ts)O
4.(20分)设控制系统如图所示。
如果要求闭环系统稳定,a值的取值范围是多少?
如果要求闭环系统的极点全部位于s=-l垂线之左,a值的取值范围又是多少?
R(s)
C(s)
A
1.(15分)已知系统结构如图所示,试用劳思判据确定参数人的取值范围,以保证系统稳定。
5.(10分)典型二阶系统单位阶跃响应曲线如下图所示,试确定系统的闭环传递函数。
(15分)单位反馈系统的开环传递函数为
〜、K(s+1)G(s)=5
S+CLS+2s+1
若系统单位阶跃响应以钏=2rad/s的频率振荡,试确定振荡时的K,。
值。
4、单位反馈系统的开环传递函数为:
G(s)=—-一、s($2+20晶+100)
(1)确定使系统稳定的参数(开环增益K,阻尼比&)的范围。
(2)取&二2,并保证系统极点全部位于s=-1的左边,确定此时的开环增益K.
6.(10分)己知系统特征方程126?
+21952+258^+85=0,问其中有多少根的实部落在开区间(-1,0)内。
7.(10分)己知系统特征方程如下,试用劳斯判据确定系统在s右半平面的根数及虚根值。
s°+3s4+12s3+24s2+32s+48=0(15分)设控制系统如图所示。
其中,K1为与积分器时间常数有关的待定参数。
已知
参数8=0.4及口”=100,试用劳斯稳定判据确定使闭环系统稳定的K1取值范围。
如果要求闭环系统的极点全部位于s=—2垂线之左,问K1值范围又应取多大?
控制系统图
11.
(10分)已知单位反馈系统的开环传递函数
+45+200)
试求位置误差系数&,速度误差系数K,,加速度误差系数氏。
12.
(10分)己知单位反馈系统的开环传递函数为
G(睥K(05E)s(s+1)(0.5s2+s+1)
试确定系统稳定时的K值范围。
4.
(10分)已知单位反馈系统的开环传递函数为
50
G(s)—s(0.1s+1)(s+5)
试求输入分别为3=21和t)=2+2t2时,系统的稳态误差。
2、(15分)已知单位反馈系统的开环传递函数为G(s)=Kgs)
s(s+1)(0.5s2+s+1)
试确定系统稳定时的K值范围,并求系统的静态误差系数母、Kv、Kao(20分)已知某控制系统结构如图所示。
1.试求出其闭环传递函数。
2.要使系统满足:
&=0.707,饥=2,试确定相应的参数K和们求此时系统的最大超调量和调节时间。
3.若r(t)=2t,求系统由,(,)产生的稳态误差ess(8)。
(注:
'=”,t=,6%=丁湿扃xlOO%,ts=—)——回^~1
13.(10分)已知单位反馈系统开环传递函数为G(s)=K(°5E)s(s+l)(2s+l)
1.
求使系统稳定的开环增益K的取值范围。
2.输入r(t)=,时,要使系统的稳态误差练(0小于0.2,求K的取值范围。
第四章:
根轨迹分析
15.
(20分)设单位反馈控制系统的开环传递函数
G(s)=
试绘制其根轨迹图,并求出使系统产生重实根和纯虚根的K*值。
3.(20分)已知单位负反馈系统的闭环传递函数为"=一(a〉0),要求:
s+as+16
(1)绘出闭环系统的根轨迹(OVovoo);
(2)判断(-VI,)点是否在根轨迹上;(3)由根轨迹求出使闭环系统阻尼比g=0.5时的a值。
16.
(10分)已知开环传递函数为
贝)=^±^(r+4s+9)2
试概略绘制其闭环系统根轨迹图。
2.(13分)已知单位负反馈系统的开环传函弘)Eg)
(1)绘制系统的根轨迹(要求确定渐近线,分离点,与虚轴交点);
(2)是否存在一个根轨迹增益值K*,使得闭环系统具有一对阻尼为0.707的共轴复根?
若存在,试给出确定K*的方法;若不存在,请给出理由。
17.
(20分)设单位反馈控制系统结构图如图所示
1.绘制该系统的根轨迹(求出渐近线、分离点、与虚轴交点等)。
2.用根轨迹法确定使系统的阶跃响应不出现超调的K的最大取值。
18.(20分)设单位反馈控制系统开环系统传递函数如下,
G(s)=
G(s)=
K
s(0.2s+1)(0.5s+1)
试概略绘出相应的闭环根轨迹图,并求出使系统产生重实根和纯虚根的K值。
*
19.(15分)设反馈控制系统中G(s)=——,H(s)=l,要求概略绘出系统的根轨迹图,s2(s+2)(s+5)
并判断闭环系统的稳定性。
5、设系统开环传递函数为=试绘制闭环系统的概略根轨迹。
20.(30)设控制系统如图所示,要求:
(1)绘制系统的根轨迹草图;
(2)用根轨迹法确定使系统稳定的值的范围;
(3)用根轨迹法确定使系统的阶跃响应不出现超调的的最大取值;
(4)用根轨迹法确定使系统出现重实根的K值;
(5)计算K;=0.5,口=2时,开环频率特性的幅值A(刃)和相位伊(刃)。
s2-2s+5(s+2)(s—0.5)
21・(20分)设控制系统如图所示。
要求:
(1)绘制K*从Otoo变化时系统的根轨迹;试求出系统呈现欠阻尼时的开环增益范围;
K*(s+2)
s+3
s(s+1)
3.(15分)设反馈控制系统中,G(s)="2g)'HSEs'要求概略绘出系统的根轨迹图,并判断闭环系统的稳定性。
第五章:
频率特性,奈氏曲线,Bode图,稳定裕度
22.
22.
(10分)已知系统的开环传递函数为
G(s)H(s)=
G(s)H(s)=
10s(2s+1)(s2+0.5s+1)
试分别计算出口=0.5和口=2时,开环频率特性的幅值A(3和相位0(刃)。
3.(7分)下图给出了某稳定系统的Nyquist曲线,试判断(-1,;0)点可能的位置,并给出解释。
23.
(10分)已知单位反馈系统的开环传递函数为
G(s)=孔5+1
若输入信号,(,)=ASin2城,其频率户1Hz,振幅A=l。
时,求系统的稳态输出Cs”)。
24.
(10分)对于典型二阶系统,已知参数旧=0.3,S=0.7,试确定截止频率牝和相角2
7、己知单位反馈系统的开环传递函数为贝)=土蝎,试绘制其开环概略幅相曲线。
25.
(10分)已知开环系统传递函数为
G(s)H(s)=_
s(s+l)(")4
试用奈氏稳定判剧判断闭环系统的稳定性。
26-Q。
分)已知单位反馈系统的开环传递函数处)=拓:
常:
:
盘“,试绘制系统
的开环对数幅频渐进特性曲线。
计算系统的相角裕度和幅值裕度。
4、(20分)某最小相位系统的开环Bode图如图所示
(1)确定系统开环传递函数;
(2)试利用渐近线近似求出系统的截止频率奶和相角裕度乒
5.
5.
5.
(15分)绘制下列传递函数的对数幅频渐近特性曲线。
20052(5+1)(105+1)
(10分)若单位反馈系统的开环传递函数为G(s)=竺二
试确定相角裕度为45°时的】值。
(2。
分)已知单位反馈系统的开环传递函数G(s)=希湍试绘制系统的开环对数幅频渐进特性曲线。
(1)利用系统的开环对数幅频渐进特性曲线求系统的截止频率和相角裕度。
第七章:
离散系统脉冲传递函数、稳态误差


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制理论 控制 理论 试题库 docx
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《C语言》课程标准.docx
《C语言》课程标准.docx
-
《初级会计实务》试题题库大全及答案详解.docx
-
《电子商务概论》模拟试题.docx
-
《教育学》读后感范文精选6篇.docx
-
《孔雀东南飞》读书笔记精选多篇.docx
-
《城镇燃气调压箱》国标.docx
-
《浅谈雨雾天如何做好安全行车》.docx
-
《电力电子技术》教案讲解学习.docx
-
《空间中直线与直线之间的位置关系》教学设计方案.docx
-
《木棉树》阅读答案.docx
-
《人大代表述职评议精选范文》.docx
-
《薪酬管理办法》.docx
-
《水》读后感精选多篇.docx
-
《无线通信原理及应用》课后习题.docx
-
《医疗机构医务人员三基训练指南医院感染管理分册》.docx
-
2分钟带翻译英语演讲稿5篇.docx
-
4s店现状分析.docx
-
06设计附加值.docx
-
《茶馆》综合能力测试题教案教学设计.docx
-
《关于深入推行科技特派员制度的若干意见》文档.docx
-
《机电企业管理导论》课后习题及答案1.docx
-
《卡普里岛》音乐教案.docx
-
《汽车维修企业管理》复习题同名17703.docx
-
《社会思想名家》刘易斯科塞自理笔记.docx
-
《调皮的日子》题库.docx
-
《心愿》教学反思.docx
-
《坐井观天》教学设计 14教案教学设计.docx
-
①怎么维持物价稳固涨字牵动百姓心.docx
-
4s店管理制度.docx
-
5有限空间作业审批.docx
-
12电气安全操作规程.docx
-
20XX年石材行业污染治理工作总结.docx
-
南理工现代电路理论混沌电路设计Word文档格式.docx
-
谈判技巧Word格式.docx
-
股权出质登记文书格式文本文档格式.docx
-
淘宝店铺运营方法Word下载.docx
-
故障指示器标准技术标书docWord格式.docx
-
年产100万箱纯天然有机富硒虫草茶系列产品生产基地设Word文档下载推荐.docx
-
关于车间统计员实习报告热门例文合集五篇Word格式.docx
-
天津行测Word文档格式.docx
-
脑瘫儿童康复指导手册Word文件下载.doc
-
牛津译林英语9AUnit2教案设计Word文件下载.docx
-
关于评选最美教师活动总结4篇Word格式.docx
-
农村集体建设用地片区综合整治项目立项操作细则Word格式文档下载.docx
-
关于网络文化的英语演讲稿Word文档下载推荐.docx
-
乒乓球模块教学计划Word文档下载推荐.docx
-
通用工资管理系统Word文档下载推荐.docx
-
普陀区生物二模考含答案Word下载.docx
-
关于学校素质拓展训练心得体会5篇Word文件下载.docx
-
女朋友生日蛋糕祝福语Word格式文档下载.docx
-
关于自由的国旗下讲话稿Word格式.docx
