 APM全部参数表.docx
APM全部参数表.docx
- 文档编号:12344002
- 上传时间:2023-06-05
- 格式:DOCX
- 页数:111
- 大小:53.42KB
APM全部参数表.docx
《APM全部参数表.docx》由会员分享,可在线阅读,更多相关《APM全部参数表.docx(111页珍藏版)》请在冰点文库上搜索。
APM全部参数表
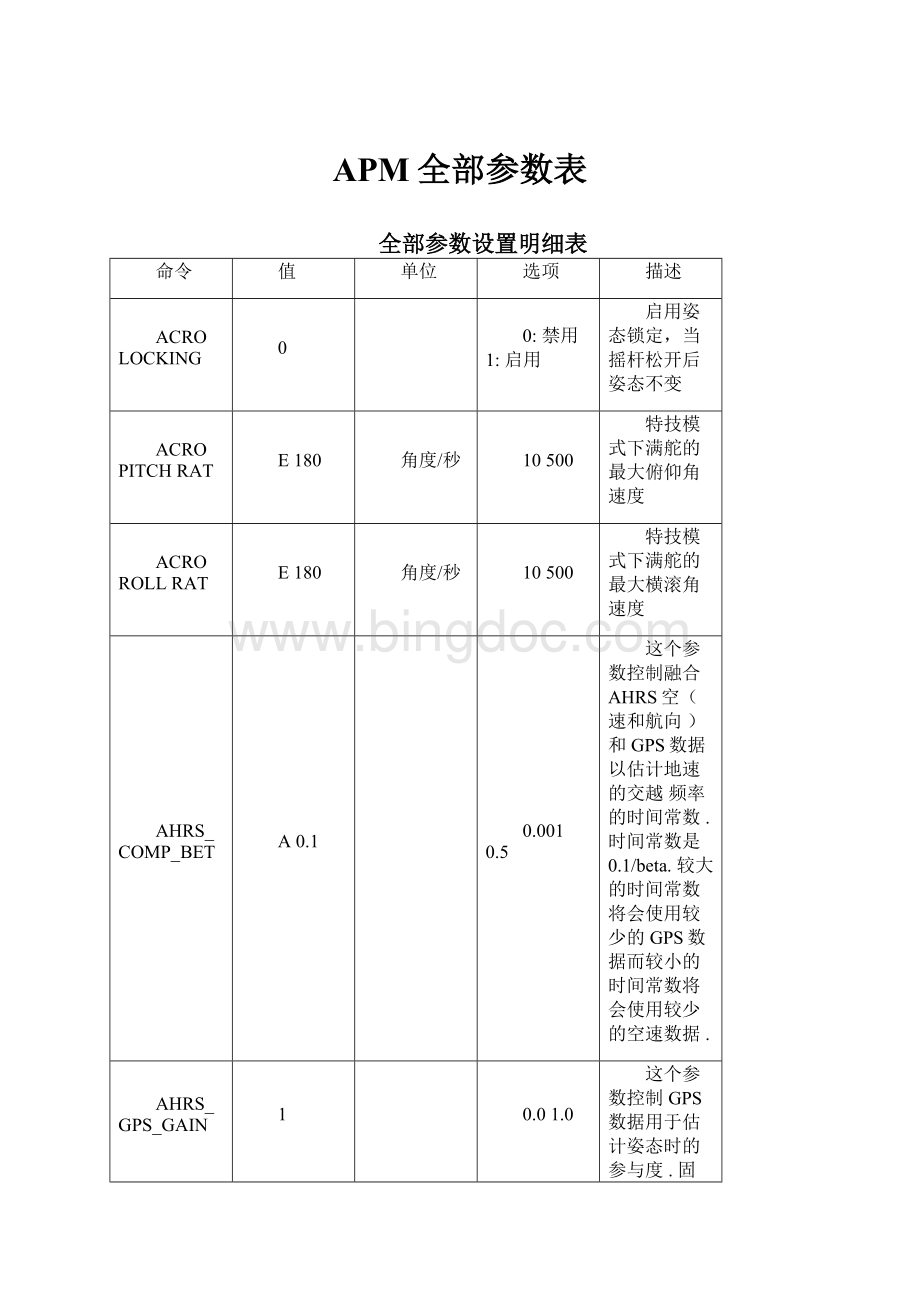
全部参数设置明细表
命令
值
单位
选项
描述
ACROLOCKING
0
0:
禁用1:
启用
启用姿态锁定,当摇杆松开后姿态不变
ACROPITCHRAT
E180
角度/秒
10500
特技模式下满舵的最大俯仰角速度
ACROROLLRAT
E180
角度/秒
10500
特技模式下满舵的最大横滚角速度
AHRS_COMP_BET
A0.1
0.0010.5
这个参数控制融合AHRS空(速和航向)和GPS数据以估计地速的交越频率的时间常数.时间常数是0.1/beta.较大的时间常数将会使用较少的GPS数据而较小的时间常数将会使用较少的空速数据.
AHRS_GPS_GAIN
1
0.01.0
这个参数控制GPS数据用于估计姿态时的参与度.固定翼飞机请勿设置为0,否则将导致失控.固定翼飞机请使用默认参数1.0.
AHRS_GPS_MINSA
S
T6
010
基于GPS速度的姿态修正所需要的最小卫星数目.默认值为6,差不多是GPS速度数据用于修正加速度计时的不可靠临界点.
AHRSGPSUSE
1
0:
禁用1:
启用
这个参数选择是盲预测还是GPS导航.若设置为0则GPS不参与导航,只进行盲预测.正常飞行总应设置为非零值
AHRS_ORIENTATI
N
O0
0:
无1:
Yaw452:
Yaw903:
Yaw1354:
Yaw1805:
Yaw2256:
Yaw2707:
Yaw3158:
Roll1809:
Roll180Yaw4510:
Roll180Yaw9011:
Roll180Yaw13512:
Pitch18013:
Roll180Yaw22514:
Roll180Yaw27015:
Roll180Yaw31516:
Roll9017:
Roll90Yaw4518:
Roll90Yaw9019:
Roll90Yaw13520:
Roll27021:
Roll270Yaw4522:
Roll270Yaw9023:
Roll270Yaw13624:
Pitch9025:
Pitch27026:
Pitch180Yaw9027:
Pitch180Yaw27028:
Roll90Pitch9029:
Roll180Pitch90
相对于标准朝向的主板安装朝向,与板型有关.这个参数将IMU和罗盘的读数进行旋转变换以使得安装角度和板子默认角度可以相差45度或者90度.这个参数将在下一次重启时生效,重启前必须将设备放置水平.
30:
Roll270Pitch90
31:
Roll90Pitch180
32:
Roll270Pitch180
33:
Roll90Pitch270
34:
Roll180Pitch270
35:
Roll270Pitch27036:
Roll90Pitch180Yaw9037:
Roll90Yaw270
AHRSRPP
0.2
0.10.4
这个参数控制加速度计修正姿态的速率
AHRSTRIMX
0
弧度
-0.1745+0.1745
补偿机架和飞控板之间的横滚角差异.正值对应于飞行器右倾.
AHRSTRIMY
0
弧度
-0.1745+0.1745
补偿机架和飞控板之间的俯仰角差异.正值对应于飞行器抬头.
AHRSTRIMZ
0
弧度
-0.1745+0.1745
未定义
AHRS_WIND_MAX
0
米/秒
0127
这个参数设置最大允许的地速和空速差异.这使得飞机能够应对失灵的空速计.0值意味着飞机将直接使用读取到的空速,哪怕数据有异常.
AHRS_YAW_P
0.2
0.10.4
这个参数控制罗盘和GPS在偏航上的参与度.较大的数值会使得飞控在航向控制上更频繁地获取罗盘和GPS数据.
ALT_CTRL_ALG
0
0:
自动
这个参数选择使用何种高度控制算法.默认为0,自动设置最适应你的机架的算法.当前的默认值是使用TECS(总能量控制系统).未来我们会加入其它高度控制算法,可以通过这个参数修改.
ALT_HOLD_FBWC
M0
厘米
电传操控B模式(FBWB:
Fly-by-WireB)和巡航(CRUISE)模式允许的最小高度.如果你试图降低至低于这个高度飞机将会拉平.零值意味着没有此限制.
ALT_HOLD_RTL
10000
厘米
返航目标高度.返航前飞行器将会爬升到这个高度并且悬停.如果这个值是负数(通常-1)则飞行器将会在执行返航时维持当前高度.注意当经过接力点(RalleyPoint)时将用接力点高度替代ALTHOLDRTL.
ALT_MIX
1
百分比
01
GPS高度和气压计高度的混合比率.0=100%GPS,1=100%气压计.强烈建议你不要改动默认值1,因为GPS高度数据是出了名地不可靠.只有一种情况下我们建议你修改这个值,就是当你拥有一个高空开启的GPS,例如你在离地几千米的地方从气球上抛下一个飞机时.
ALTOFFSET
0
米
-3276732767
这是在自动飞行模式下加入到目标高度数值的高度偏移量.这可以
用来在自动模式中加入全球高度偏移
ARMING_CHECK
2
0:
无1:
全部选项2:
气压计4:
罗盘8:
GPS16:
惯导32:
参数64:
遥控发射机128:
主板电压256:
电池等级
解锁电机前需要执行的检查.这是一个在允许解锁操作前执行的位掩模操作.默认选项是不检查,允许任意时刻解锁.你可以通过把各项容的编码求和来开启你想要的检查容.例如,仅在拥有GPS锁定和人工遥控同时有效时允许解锁,则可以设置ARMINGCHEC为K72.
ARMING_DIS_RUD
0
0:
禁用(允许方向舵掰杆)1:
启用(不允许方向舵掰杆)[译注:
启用禁用的逻辑是针对于这个项的描述,与实际方向舵掰杆使能是反的]
禁止使用方向舵掰杆解锁.
ARMING_REQUIRE
2
0:
禁用1:
解锁后油门PWM在THR_MIN(怠速)2:
解锁后油门0PWM停(转)
除非达成一些条件否则禁止解锁.若此项为0则无限制(立即解锁).若为1,需要在电机解锁前方向舵掰杆或者地面站解锁,并在解锁后输送THR_MIN的PWM值到油门通道.若为2,需要在电机解锁前方向舵掰杆或者地面站解锁,并在解锁后输送0PWM值到油门通道.设置ARMING_CHECK参_数*来决定何种解锁前自检需要完成.注意,若此项设为0,需要重启设备才能解锁.即便此项为0,如果ARMING_CHEC没K有被设为0,则飞行器会因为解锁前检查不通过而无法解锁电机.
ARSPD_AUTOCAL
0
如果启用这项,APM会在飞行时基于一个使用地速和实际空速的估计滤波器自动调整ARSPD_RATIO如.果比率值变化超过5%,自动校准会将新的比率值每隔2分钟存入EEPROM
ARSPDENABLE
0
0:
禁用1:
启用
开启空速计
ARSPD_FBW_MAX
22
米/秒
550
所有自动油门情况下对应于最大油门值的空速(FBWB,巡航,自动任务,引导,悬停,盘旋以及返航).这是一个校准后的(显式)空速
ARSPDFBWMIN
9
米/秒
550
所有自动油门情况下对应于最小油门值的空速(FBWB,巡航,自动任务,引导,悬停,盘旋以及返航).这是一个校准后的(显式)空速.
ARSPDOFFSET
833.2711
空速计校准后的偏移
ARSPD_PIN
0
空速计连接到的模拟IO口.设置这个参数为0-9来对应APM2的模拟引脚.使用APM1时设置为64,对应于板子末端的空速计接口.使用PX4时设为11,对应于模拟空速计接口.使用Pixhawk时设为15,对应于模拟空速计接口.使用EagleTree或MEASI2C空速计的PX4或者Pixhawk,设置为65.
ARSPDRATIO
1.9936
空速计校准后的比率
ARSPDSKIPCAL
0
ARSPD_TUBE_OR
R
DE
2
这个参数允许你在皮托管里的连接顺序有影响时选择.如果设置为0则顶部连接的传感器是动态压强.如果设置为1则底部连接的传感器是动态压强.若设为2(默认)则空速管驱动器将会接受任意一种顺序.你可能想要指定顺序的原因在于它能够使你的空速计检测飞行器是不是受到了过大的静压强,而这可能被解读成正空速.
ARSPDUSE
0
1:
使用0:
不使用
使用空速数据进行飞行控制
AUTO_FBW_STEE
R0
0:
禁用1:
启用
开启此项将使得在自动模式中可以使用FBWA的方式进行操控.这可以用来执行带有航点逻辑的人工增稳飞行,或可用于载荷[译注:
即飞的时候知道航点,一个个航点飞过去].启用后飞行员拥有和FBW模式中一样的操控,但普通的自动模式导航被完全禁用.寻常情况不推荐这个选项.
AUTOTUNE_LEVE
L6
110
自动调参的激烈程度.在较低等级的AUTOTUNE_LEV上EL自动调参较为柔和,增益较小.对于大多数用户而言推荐5级.
BATTAMPOFFS
T0
伏特
在0电流情况下传感器的电压读数偏移值
BATT_AMP_PERV
T
OL17
安培/伏特
当电流传感器读数为1V时转换得到的电流值.对于使用3DR电源模块的APM2或者Pixhwak这个值必须为17.对于使用3DR四合一电调的Pixhawk这个值必须为17.
BATTCAPACITY
3300
毫安时
满电电池的容量,以mAh计
BATT_CURR_PIN
12
-1:
禁
用1:
A12:
A23:
Pixhawk
12:
A12101:
PX4
设置这个参数为0至13将指定电池电流传感器的管脚对应于A0至A13.对于APM2.5的电源模块,这个值必须为12.在PX4上这个值必须为101.对于使用电源模块的Pixhawk这个值必须为3.
BATTMONITOR
3
0:
禁用3:
仅电压4:
电压和电流
控制电池电流或电压监控
BATT_VOLT_MULT
10.57399
用来将电压传感器管脚检测到的电压值(BATT_VOLT_PIN转)换成实际电压值(管脚电压*VOLT_MULT).对于APM2或者Pixhawk的3DR电源模块,这个值为10.1.对于使用3DR四合一电调的Pixhawk这个值为12.02.对于使用PX4IO电源模块的PX4这个值必须为1.
BATT_VOLT_PIN
13
-1:
禁
用0:
A01:
A12:
Pixhawk
13:
A13100:
PX4
设置这个参数为0至13将指定电池电压传感器的管脚对应于A0至A13.对于APM2.5的电源模块,这个值必须为13.在PX4上这个值必须为100.对于使用电源模块的Pixhawk这个值必须为2.
BATT2_AMP_OFFS
T
E0
BATT2AMPPERVL
O
17
BATT2CAPACITY
3300
BATT2CURRPIN
12
BATT2MONITOR
0
BATT2VOLTMUL
T10.1
BATT2VOLTPIN
13
CAM_DURATION
10
050
以0.1秒计的相机快门维持开启的时长(例如:
输入10代表1秒,50代表5秒)
CAMSERVOOFF
1100
10002000
相机快门关断时的舵机PWM脉宽值
CAMSERVOON
1300
10002000
相机快门激活时的舵机PWM脉宽值
CAM_TRIGG_DIST
0
01000
以米计的相机快门间隔.如果这个数值非零,只要GPS位置发生变化超过这个米数就会触发相机拍照,无论APM在何种模式注意这个参数也可以在自动任务过DO_SET_CAM_TRIGG_D指IS令T来设置,使你可以在飞行中启用/禁用相机快门触发.
CAMTRIGGTYPE
0
0:
舵机1:
继电器
如何触发相机拍照
COMPASSAUTOD
EC1
0:
禁用1:
启用
启用或禁用以GPS坐标为参数自动计算磁偏角
COMPASSDEC
0
弧度
-3.1423.142
补偿地磁南极和地理南极的偏差角度
COMPASS_EXTER
L
NA0
0:
部1:
外部
设置罗盘为外部连接.这在PX4上是自动识别的,但是在APM2上必须正确设置.若使用了外罗盘,请置1.如果使用了外罗盘,COMPASSORIEN选T项独立于AHRSORIENTATIO选N项
COMPASSLEARN
0
0:
禁用1:
启用
启用或禁用罗盘偏移的自动获取
COMPASS_MOT_X
0
偏移量每安培,或者在全油门时的偏移量
-10001000
系数乘以当前油门值并加入罗盘X轴数值,以此补偿电机干扰
COMPASS_MOT_Y
0
偏移量每安培,或者在全油门时的偏
-10001000
系数乘以当前油门值并加入罗盘Y轴数值,以此补偿电机干扰
移量
COMPASS_MOT_Z
0
偏移量每安培,或者在全油门时的偏移量
-10001000
系数乘以当前油门值并加入罗盘Z轴数值,以此补偿电机干扰
COMPASS_MOTC
T0
0:
禁用1:
油门值补偿2:
电流值补偿
设置电机干扰补偿类型为禁用、油门值或者电流值.请勿手动修改此参数.
COMPASSOFSX
18
-400400
为了补偿机架中的铁磁性而引入的对X轴磁罗盘数据的偏移
COMPASSOFSY
12
-400400
为了补偿机架中的铁磁性而引入的对Y轴磁罗盘数据的偏移
COMPASSOFSZ
-49
-400400
为了补偿机架中的铁磁性而引入的对Z轴磁罗盘数据的偏移
COMPASS_ORIEN
T0
0:
无1:
Yaw452:
Yaw903:
Yaw1354:
Yaw1805:
Yaw2256:
Yaw2707:
Yaw3158:
Roll1809:
Roll180Yaw4510:
Roll180Yaw9011:
Roll180Yaw13512:
Pitch18013:
Roll180Yaw22514:
Roll180Yaw27015:
Roll180Yaw31516:
Roll9017:
Roll90Yaw4518:
Roll90Yaw9019:
Roll90Yaw13520:
Roll27021:
Roll270Yaw4522:
Roll270Yaw9023:
Roll270Yaw13624:
Pitch9025:
Pitch27026:
Pitch180Yaw9027:
Pitch180Yaw27028:
Roll90Pitch9029:
Roll180Pitch9030:
Roll270Pitch9031:
Roll90Pitch18032:
Roll270Pitch18033:
Roll90Pitch27034:
Roll180Pitch270
与自驾仪主板相关的罗盘安装朝向.这个参数会在选择飞控板时自动正确设置,但也可以在使用了外罗盘的情况下手动修改.查阅您的外罗盘技术手册来获取正确指向.正确指向下X轴朝前,Y轴朝右,Z轴朝下.如果您的飞行器指向西面应该看到Y轴有正读数,X轴读数接近0.注意:
朝向参数需要结合AHRS_ORIENTATIO设N定.
35:
Roll270Pitch270
36:
Roll90Pitch180Yaw90
37:
Roll90Yaw270
COMPASSUSE
1
0:
禁用1:
启用
启用或禁用以磁罗盘计算航向(而非GPS)
ELEVONCH1RE
V0
-1:
禁用1:
启用
升降补助翼(elevon)通道1反相
ELEVONCH2RE
V0
-1:
禁用1:
启用
升降补助翼(elevon)通道2反相
ELEVON_MIXING
0
0:
禁用1:
启用
在输入和输出上启用升降补助翼(elevon)混控.若仅需要输出混控请看ELEVONOUTP选UT项.
ELEVON_OUTPUT
0
0:
禁用1:
上-上2:
上-下3:
下-上4:
下-下
启用软件升降补助翼(elevon)混控输出.若开启则APM会软件实现在副翼和升降通道上的升降补助翼混控.有4种不同的混控模式可供选择,也就是说4种不同的升降舵控制可以被映射到两个升降补助翼舵机上.注意你不可以同时使用升降补助翼混控和遥控数值的直接映射(Pass-Through),例如APM1的通道CH8手动控制.因此如果你使用APM1则需要在启用ELEVON_OUTP前UT设置FLTMODE_C为H非CH8通道.请同时查看MIXINGGAIN参数来确定输出增益.
ELEVONREVERS
E0
0:
禁用1:
启用
升降补助翼(elevon)混控反相
FBWA_TDRAG_CH
AN0
这是一个用来开启电传操控A拖尾机起飞(FBWAtaildraggertakeoff,译注:
taildragger尾拖机也就是后三点式飞机)模式的遥控接收机通道(PWM高于1700开启).这个通道应该指定为一个弹性开关.当这个功能启动后就会一直保持启动状态,直到:
达到空速TKOFF_TDRAG_SP模D1式/改变/仰角高于启动时仰角或者低于0.启用后升降舵被强制定为TKOFF_TDRAG_ELE这V.个选项使得尾拖机在电传操控A模式下更易起飞,且使得在电传操控A模式下测试自动起飞操控更为容易.设为0禁用这个选项.
FBWB_CLIMB_RAT
E2
1-10
这个参数设置电传操控B(FBWB)FBW和B巡航(Cruise)模式下升降舵满偏时的目标高度变化率(米/秒).注意飞机的实际爬升率会低于这个值,这依赖于你的空速和油门控制设定.若这个参数设为默认值2.0,则保持升降舵满偏10秒将会导致高度变化20米.
FBWBELEVREV
0
0:
禁用1:
启用
反转在电传操控B(FBWB和)巡航(Cruise)模式下的升降.设为0意味着拉高(后拉摇杆)代表下降高度.设为1,拉高代表提升高度.
FENCE_ACTION
0
0:
无1:
引导模式2:
仅报告3:
引导模式+油门映射
电子围栏突破时执行的行为.设为0则没有动作,也就是禁用了电子围栏.设为1则飞机进入引导模式(Guided),且目标航点是围栏返回点.若设为2则仅报告这个情况给地面站,不执行行为.若设为
3飞机进入引导模式,但同时保留飞行员的手动油门控制.
FENCE_AUTOENA
E
BL0
0:
不自动启用1:
自动启用
若设为1,自动起飞后电子围栏自动启动,自动降落开始阶段电子围栏自动关闭.飞机位于地面上还未起飞时电子围栏关闭.目视飞行时建议使用电子围栏开关通道,而不是这个参数.
FENCECHANNEL
0
启用电子围栏的遥控通道.PWM输入高于1750时开启.
FENCEMAXALT
0
米
032767
电子围栏突破前飞机能达到的最大高度
FENCEMINALT
0
米
032767
电子围栏突破前飞机能达到的最小高度
FENCE_RET_RALL
Y0
0:
FenceReturnPoint
1:
NearestRallyPoint
若设为1:
电子围栏突破时飞机将回到最近的接力点而不是围栏返回点.若没有定义任何接力点则飞机将回到起始点.
FENCE_RETALT
0
米
032767
当电子围栏突破时飞机将会回到的高度.若FENCE_RETAL FENCETOTAL 0 当前加载的电子围栏总点数 FLAP1PERCNT 0 百分比 0100 当FLAP1SPEE达D到时襟翼的位置变化量.设为零来禁用这个襟翼 FLAP1SPEED 0 米/秒 0100 开启襟翼FLAP_1_PERCEN对T应的速率(米/秒).注意FLAP_1_SPEE必须大于等于FLAP2SPEED FLAP2PERCNT 0 百分比 0100 当FLAP_2_SPEE达D到时襟翼的位置变化量.设为零来禁用这个襟翼 FLAP2SPEED 0 米/秒 0100 开启襟翼FLAP_2_PERCEN对T应的速率(米/秒).注意FLAP_1_SPEE必须大于等于FLAP2SPEED FLAP_IN_CHANNE L0 用于控制襟翼的遥控输入通道.若这个值被设为某个遥控通道编号,则那个通道用于手动控制襟翼.开启时,襟翼的变化百分比相当于从这个通道中位点到这个通道最低点的变化百分比.高于中立点的值将会产生反向襟翼(即扰流


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- APM 全部 参数表
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #电控发动机的故障诊断与排除.docx
#电控发动机的故障诊断与排除.docx
-
《财务管理学》人大版第五章习题答案.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《反抗之真心英雄》读后感.docx
-
《C语言程序设计》阅读程序写结果试题汇总.docx
-
《汉书艺文志》小说家与子部小说著录.docx
-
《江苏省建设工程施工项目经理部和项目监理机构主要管理人员配备办法》.docx
-
《C语言程序设计》课程形成性考核作业.docx
-
《诚实与信任》教学设计.docx
-
《变化社会中的政治秩序》读后感.docx
-
《44光的折射》教案.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《大数据导论》19秋期末考核0001.docx
-
《大型养路机械使用管理规则》.docx
-
《混凝土结构工程施工质量验收规范》GB 条文说明.docx
-
《会计基础》练习答案解析.docx
-
《民法典》试题第三编合同二试题及答案.docx
-
《建设工程消防监督管理规定》公安部119号令1101.docx
-
《赢》杰克韦尔奇读书笔记.docx
-
《活出全新的自己》读后感精选9篇.docx
-
《拿破仑传》读后感范文5篇.docx
-
《去年的树》课堂实录及点评doc.docx
-
《人体解剖生理学》练习题库.docx
-
00以内整数加减.docx
-
《手工制作中培养幼儿创意能力的实践研究》完整.docx
-
《校园防汛工作计划》.docx
-
06年批发零售业研究报告.docx
-
《小王子》金句赏析英语作文.docx
-
《中华人民共和国职业病防治法》条文释义下.docx
-
007电子请柬.docx
-
1物业事业部运营管理方案.docx
-
《新闻写作教程》中篇整理资料.docx
-
水工建筑物形考及答案.docx
-
四年级数学说课稿三篇.docx
-
四年级语文上册教案.docx
-
送远杜甫答案.docx
-
苏教版四年级下册全册同步练习含课课练和单元检测.docx
-
苏州市学业质量阳光指标调研卷 高二英语含答案.docx
-
隧道帷幕注浆实施细则.docx
-
糖尿病患者健康管理适宜技术.docx
-
特种设备检验检测机构核准申请书.docx
-
体育中考祝福语.docx
-
天然草施工方案.docx
-
听音室装修知识总汇希望各路高手补充剖析.docx
-
通用班级学生评语模板.docx
-
投标文件编制指南1.docx
-
图书馆管理系统程序设计.docx
-
推荐学习高考化学深化复习+命题热点提分专题化学反应速率和化学平衡.docx
 专八考试内部培训资料语言学练习解析.ppt
专八考试内部培训资料语言学练习解析.ppt
-
外汇和期货交易实训日记.docx
-
实施素质教育综合评定学1.docx
