 单闭环磁盘驱动读取系统性能分析与参数设计文档格式.docx
单闭环磁盘驱动读取系统性能分析与参数设计文档格式.docx
- 文档编号:1079959
- 上传时间:2023-04-30
- 格式:DOCX
- 页数:13
- 大小:260.60KB
单闭环磁盘驱动读取系统性能分析与参数设计文档格式.docx
《单闭环磁盘驱动读取系统性能分析与参数设计文档格式.docx》由会员分享,可在线阅读,更多相关《单闭环磁盘驱动读取系统性能分析与参数设计文档格式.docx(13页珍藏版)》请在冰点文库上搜索。
时间(天)
指导老师下达任务书,审题、査阅相关资料
2
分析、计算
编写程序
撰写报告
论文答辩
指导教师签名:
系主任(或责任教师)签名:
摘要I
单闭环磁盘驱动读取系统性能分析与参数设计1
1设计的目的及意义1
1.1设计目的1
1.2设计意义1
2原系统性能分析2
2.1磁头控制系统结构图2
2.2校正前系统开环传递函数2
2.3校正前系统闭环传递函数2
2.4校正前系统稳定性能分析2
3设计系统4
3.1设计系统思路4
3.2设计步骤4
3.2.1系统动态性能的分析思路4
3.2.2分析N(s)与R(s)的不同情况4
3.2.3系统的频域性能指标错误!
未定义书签。
3.3分析跟踪单位斜坡输入8
3.4分析跟踪单位加速度输入错误!
4再议稳定性错误!
总结错误!
参考文献错误!
摘要
在现代科学技术的众多领域中,自动控制系统起着越來越重要的作用。
近儿十年來随着电了计算机技术的发展和应用,在宇宙航行、机器人控制、导弹制导以及核动力等高新技术中,白动控制计数具有特别重要的作用。
白控是系统设计,现代控制,电机调速等后续学科的基础。
俗话说:
“万丈高楼平地起。
”与自动化相关的专业,其专业课程必设计自控原理;
从工程角度讲,被控制的对象一般接收的信号都是模拟信号,这就有一定的物理意义,而物理学是一种理论性较强的学科。
未来白动化的设备将会应用更加广泛,白动化设备也会更加智能,这些都是建立在自控原理Z上的。
磁盘可以方便有效的储存信息。
磁盘驱动器则广泛用丁•从便携式计算机到大型计算机等各类计算机中,是控制工程的一个重要应用实例。
本次任务是如何让磁盘系统精确读取。
关键字:
自动控制白动化磁盘系统
单闭环磁盘驱动读取系统性能分析与参
数设计
1设计的目的及意义
1.1设计目的
1、通过本次课程设计,能够培养自己理论联系实际的设计思想,训练自己综合运用经典控制理论和相关课程知识的能力。
2、掌握口动控制原理中各种校正装置的作用及用法,根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
3、进一步加深对MATLAB软件的认识和理解,学会使用MATLAB语言来进行系统建模、系统校正中的性能参数的求解、以及系统仿真与调试。
4、此外,还可以通过本次设计來锻炼独立思考和动手解决控制系统实际问题的能力。
1.2设计意义
通过对磁盘驱动器磁头控制系统的校正,可以保证磁头的精确位置,可以减小参数变化和外部振动对磁头定位造成的影响。
作用丁•磁盘驱动器的扰动包括物理振动、磁盘转轴轴承的磨损和摆动,以及元件老化引起的参数变化等。
2原系统性能分析
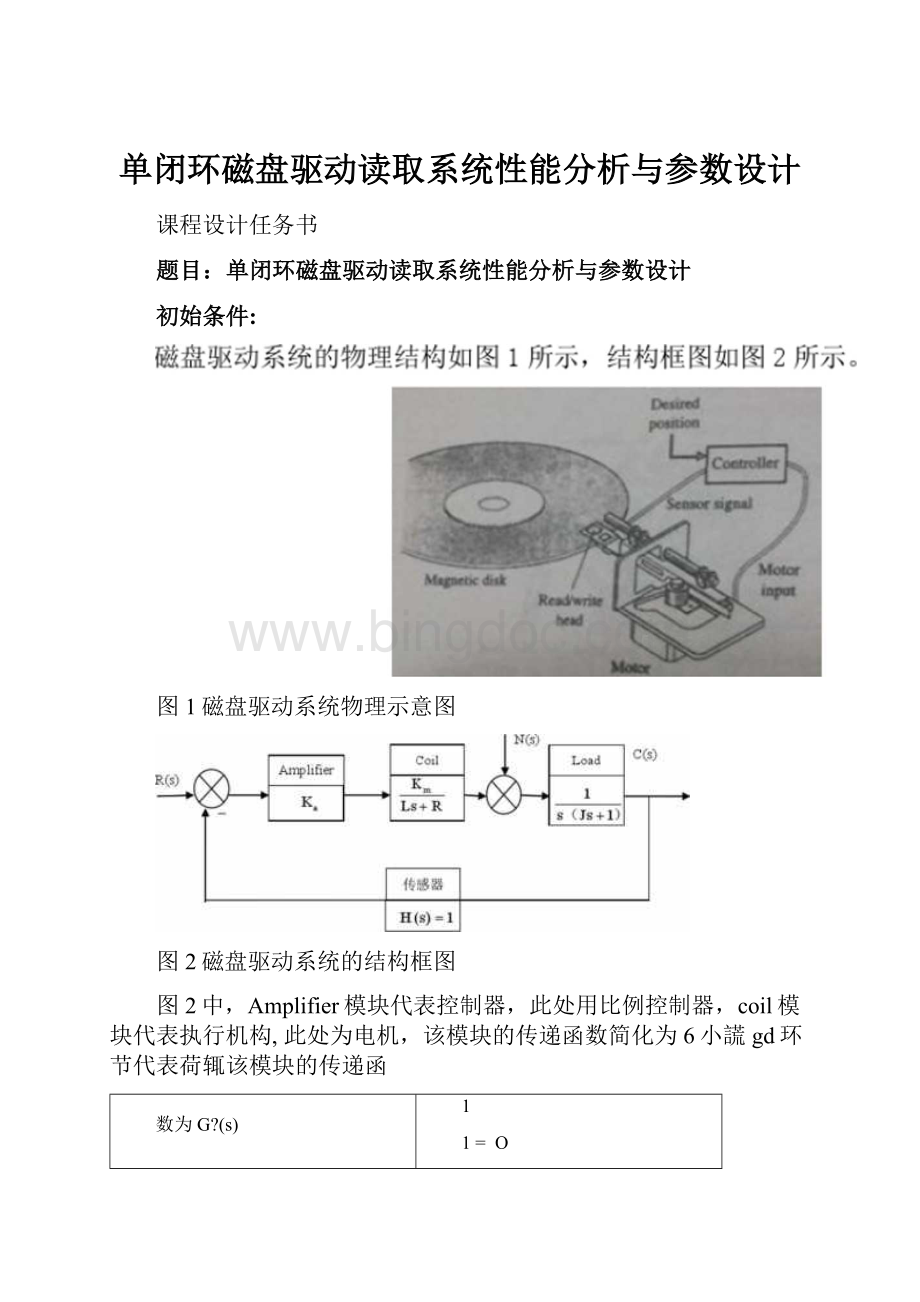
2.1磁头控制系统结构图
图2・1磁头控制系统结构图
2.2校正前系统开环传递函数
由初始条件可得:
其开环传递函数为:
G(s)=
闭环传递函数为:
2.4校正前系统稳定性能分析
该闭环函数的特征方程为:
D(s)=s3+1020s2+20000s+50Q0Ka
列出相应的劳斯表:
1020
bi
5QQQKa
表2-1系统劳斯表
其中
1020*20000-5000/^bi=
当心=4080时,b=O,出现临界稳定情况。
有劳伦斯可得辅助方程
1020s2+5000*4080=0
解其方程得系统的一对纯虚根为S“=±
141.4八显然,此时使系统稳定的心值范围应
0<
/<
fl<
4080
稳态误差为:
%=!
jjgsE(s)=4/(4+忍)
根轨迹如下图:
RootLocus
图2-2K=20时的系统根轨迹
此时开环传递函数有0个零点,三个极点,分别为0,-20,4000o
3设计系统
3.1设计系统思路
为了使磁头控制系统的性能满足要求,需要进行在不同心值下用MATLAB对超调量的计算。
3.2设计步骤
3.2.1系统动态性能的分析思路
在控制工程中,儿乎所有的控制系统都是高阶系统,即用高阶微分方程描述的系统。
对于不能用一、二阶系统近似的高阶系统來说,其动态性能指标的确定是比较复杂的。
工程上常采用闭环主导极点的概念对高阶系统进行近似分析,或直接应用MATLAB软件进行高阶系统性能分析。
通过计算及绘制根轨迹图得出系统闭环根轨迹特性,通过其阶跃响应可知其稳定性。
3.2.2分析N(s)与R(s)的不同情况
1)当N(s)=OR(s)=l/s时
误差信号
_1
"
)1+KjG丄(S)G2(S)5
于是
11
魄eW=些叫+km(s)G2⑸]7=0
上式表明系统在单位阶跃输入作用下的稳态跟踪误差为零。
这一结论与應取值无关。
当N(s)=O时
闭环传递函数为:
0_%)_K°
Gds)G2⑸
R(s)1+KqGi(s)G2(s)
_5000Ka
=s(s+20)(s+1000)+5000“
此时分別取心=10、Ka=30和心=60利用MATLAB文本绘制响应曲线图3、图4和图5
当心=10时
此时的程序文本和图形如下:
nuui=[50000]:
den=[l,1020,20000,50000]:
step(iiuni,den)
StepResponse
1.2
System:
sys
0.8
Time«
seconds):
2.29
Amplitude:
0.998
64
0Ciapn三dlu<
02
01111111
00511.522.533.54
Time(seconds)
图3・1心=10时的阶跃响应曲线由图形可得此时的超调量小于4.3%。
当Ka=30时,此时的程序文本和图形为:
num=[1500001;
den=[1,1020^0000,1500001:
step(num,den)
图3・2Ka=30时的阶跃响应曲线
当心=60时,此时的程序文本和图形为:
nuni=[3000001;
den=[1J02020000,3000001:
step(num5den)
0.10.20.3040.5
0.60.7
8642
oo.o0apn—-dLua
图3・3厶=60时的阶跃I呵应曲线
CO=l+KaGi(s)G2⑸N(S)
Ka=60利用MATLAB文本绘制响应曲线图4
校正前的伯徳图在matlab中的程序如下:
G=zpk([],[0・1000-20],7.5*1000*20);
sys=feeclback(GJ);
figiire(l);
margin(G);
gi,id
figiire
(2);
bode(sys);
grid
figiire(3);
step(sys);
系统开环对数幅频和相频曲线伯徳图如下图:
BodeDiagram
图3・5系统开环对数幅频和相频曲线伯徳图
系统闭环对数幅频和相频曲线如下图:
-50
-100
-150
-200
-90
-180
-270
10d10°
101102103104105
Frequency(rad/s)
图3-6系统闭环对数幅频和相频曲线
闭环系统单位阶跃响应曲线如下图:
图3・7闭环系统单位阶跃响应曲线
由伯徳图可得:
原传递函数的截至频率为:
a)c=141rad/s原传递函数的穿越频率为:
叫=7.07厂ad/s原传递函数的相角裕度为:
y=70.1deg原传递函数的幅值裕度为:
|G(jwc)|=42.7db
3.3分析跟踪单位斜坡输入
在控制系统屮,要求r(t)=Rt,其中R为输入阶跃函数的幅值,英值为1,则R(s)=R/s2o将
R⑸代入,算出各型系统在斜坡输入作用下的稳态误差:
误差计算:
由系统给定的开环传递函数可得:
口汉理工大7《门动控制系统》课程设计说明书
课程设计题目:
单闭环磯盘驱动读取系统性能分析与参数设计
课程设计答辩或质疑记录:
成绩评定依据:
评定项目
最高分限
评分成绩
1.选题合理、目的明确
10
2.设计方案正确、具有可行性、创新性
20
3.设计结果(例如:
系统设计程序、仿真程序)
4.态度认真、学习刻苦、遵守纪律
15
5.设计报告的规范化、参考文献充分(不少于5篇)
6.答辩
25
总分
100
最终评定成绩(以优、良、中、及格、不及格评定)
指导教师签字:
年月日


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 闭环 磁盘 驱动 读取 系统 性能 分析 参数 设计
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
-
证券投资顾问业务暂行规定.docx
-
知识产权法司法考试历年真题及答案解析.docx
-
职业道德的复习重点.docx
-
志愿者活动心得精选多篇.docx
-
治理雾霾应重视大气静电学说.docx
-
中国成人脑死亡判定标准与操作规范第二版.docx
-
中国名牌产品申请表.docx
-
中国纸板产业深度调研及产业投资评估报告.docx
-
中考化学考点分类解析导学案14第3讲碳和碳的氧化物1碳单质的物理性质和用途.docx
-
中学学年度第二学期学校工作计划.docx
-
中英文安全标语word版本 26页.docx
-
重庆市高考英语试题.docx
-
注册安全工程师《安全生产管理知识》真题及答案.docx
-
装机必备硬件基础知识再接再厉完成装机.docx
-
子部.docx
-
总结范文骨干教师培训总结15篇.docx
-
最新 Marlin固件全中文解析.docx
-
最新部编版三年级语文上册第24课《司马光》教学设计.docx
-
最新二年级数学上册寒假作业全面系统146.docx
-
最新猴年祝贺词大全 精品.docx
-
最新入党思想报告3000字范文思想汇报文档五篇.docx
-
《OTL功率放大器的制作与调试》项目教学设计方案.docx
-
《化学方程式》单元检测2.docx
-
中考语文阅读精品题.docx
-
工伤司法鉴定标准是怎样的.docx
-
公共事务管理硕士在职专班入学研究计画书.docx
-
公考必备《行测》数量关系题库.docx
-
股票技术指标详解二.docx
-
人教版数学六下第二单元《百分数二》word教案精品教案.docx
-
简大型机房建设系统全套设计方案.docx
-
建筑工程基础加固与纠偏处理应用探讨.docx
-
中国古代史总复习1.docx
-
中级经济师商业经济专业知识与实务真题及答案知识.docx
-
自动化仪表施工现场标准化规范.docx
-
最新上海市定额计算规则土建.docx
-
做一名阳光教师演讲稿共21页.docx
-
《古代汉语》考研王力版讲义考研复习笔记与考研真题.docx
-
《教育技术学》第2版笔记和名师何克抗习题详解.docx
-
《幼儿园玩教具制作》教案.docx
-
《运动控制系统》综合复习题.docx
-
51 物体的质量 教学设计.docx
-
GKGG5全自动印刷机操作规范.docx
-
PVA纳米纤维膜的制备及微观形貌研究.docx
-
ViewPoint8033 安装指南.docx
-
八上U2.docx
-
安排的近义词.docx
-
安徒生童话故事一个贵族和他的女儿们.docx
-
包1主要网络设备及网络综合布线电话系统技术参数共16页文档.docx
-
办公用品采购及管理规定.docx
-
北京模具厂注塑模具设计.docx
