 大摆锤动力学分析报告.docx
大摆锤动力学分析报告.docx
- 文档编号:10557358
- 上传时间:2023-05-26
- 格式:DOCX
- 页数:24
- 大小:3.83MB
大摆锤动力学分析报告.docx
《大摆锤动力学分析报告.docx》由会员分享,可在线阅读,更多相关《大摆锤动力学分析报告.docx(24页珍藏版)》请在冰点文库上搜索。
大摆锤动力学分析报告
大摆锤动力学分析报告
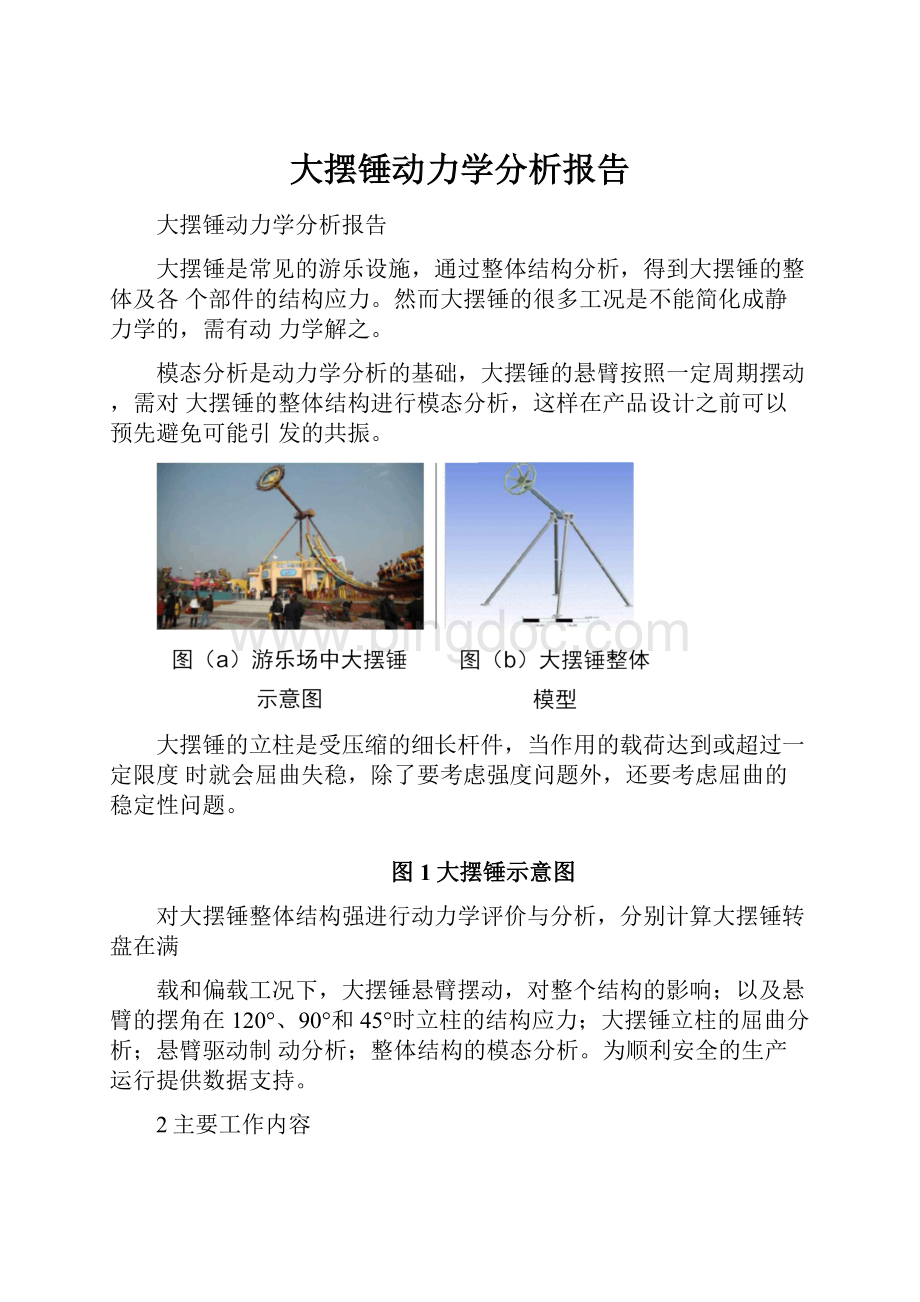
大摆锤是常见的游乐设施,通过整体结构分析,得到大摆锤的整体及各个部件的结构应力。
然而大摆锤的很多工况是不能简化成静力学的,需有动力学解之。
模态分析是动力学分析的基础,大摆锤的悬臂按照一定周期摆动,需对大摆锤的整体结构进行模态分析,这样在产品设计之前可以预先避免可能引发的共振。
大摆锤的立柱是受压缩的细长杆件,当作用的载荷达到或超过一定限度时就会屈曲失稳,除了要考虑强度问题外,还要考虑屈曲的稳定性问题。
图1大摆锤示意图
对大摆锤整体结构强进行动力学评价与分析,分别计算大摆锤转盘在满
载和偏载工况下,大摆锤悬臂摆动,对整个结构的影响;以及悬臂的摆角在120°、90°和45°时立柱的结构应力;大摆锤立柱的屈曲分析;悬臂驱动制动分析;整体结构的模态分析。
为顺利安全的生产运行提供数据支持。
2主要工作内容
(1)建立整体的动力学分析模型,计算满载和偏载工况下,立柱的受力情况;
(2)计算大摆锤悬臂摆角在120°、90°和45°时立柱的结构应力强度;
(3)悬臂驱动制动分析,以及驱动制动对立柱的影响;
(4)大摆锤整体的模态分析;
(5)大摆锤立柱的屈曲分析
3.1材料参数
=7.85t/m
整体结构材料:
Q235钢。
材料力学参量为:
材料密度为3.2几何模型
使用通用结构分析软件ANSYSWorkbenchEnvironment(AWE)14.0多物
理场协同CAE仿真软件,对大摆锤的整体进行建模,分别建立立柱、悬臂、
大转盘建,并在软件中进行装配,如图3所示。
(a)大摆锤整体结构(b)转盘局部结构
(c)大摆锤悬臂(d)大摆锤立柱
图2大摆锤整体装配模型
3.3载荷与约束
立柱的底板固定在地方面,因此在立柱底板与地面之间,施加固定
(Fixed)约束,模拟底板与地面之间的紧固连接。
在重力作用下,悬臂绕转筒中心轴转动,在悬臂的横臂的内表面和立柱固定筒之间,施加旋转幅(Revolute),模拟悬臂绕横梁转动。
在悬臂摆动的过程中,大转盘同时绕着悬臂的中轴线转动,转动的角速
度为1.07rad/s。
悬臂与大转盘之间,施加旋转幅(Revolute),模拟大转盘绕
悬臂的转动。
悬臂在整个摆动周期内,受到地球重力的作用,做周期性的摆动,施加标准的重力加速度,方向为Y的负向。
载荷与约束如图5所示
图3大转盘载荷与约束示意图
3.4刚体动力学分析结果
使用通用结构分析软件ANSYSWorkbenchEnvironment(AWE)14.0中的刚体动力学分析模块RigidDynamics,对大摆锤进行动力学分析。
为了模拟满载和偏载对立柱的影响,分两种工况对大摆锤进行分析。
设定分析时间为20s。
工况1:
满载时,大摆锤的动力学响应;
工况2:
偏载时,大摆锤的动力学响应。
为了模拟启动制动对立柱的影响,模拟启动制动分析,启动制动时间为
0.5s,角速度变化为0.13r/s。
设定完成后,对启动制动进行动力学分析
341工况1:
满载时,大摆锤的动力学响应
在满载工况下,大摆锤的悬臂和转盘,在重力作用下,绕转筒做左右摆
动,整个摆动过程如图4所示。
箭头表示立柱上部受到悬臂摆动过程中的反
图4工况1大摆锤动力学分析中摆动状态图
悬臂在摆动过程中,立柱受到悬臂的反作用力,三个方向的反作用力及总的反作用力如图5(a)所示,悬臂受到总的反作用力最大为658.55KN,总的反作用力最大值与丫向反作用力的最大值重合,表明大摆锤运动到底部时,受到的反作用力主要由丫向反作用力提供,大摆锤运动到底部时,受到的载荷最大。
Z向的反作用力最大为0.000386KN,由于为满载,Z向始终保持平衡,反作用力几乎为零。
具体数据见附表1。
(a)立柱反作用力的载荷时间曲线
(b)立柱受到Z向反作用力的载荷时间曲线
图5工况1立柱受到悬臂的反作用力曲线图
342工况2:
偏载时,大摆锤的动力学响应
在偏载工况下,大摆锤的悬臂和转盘,在重力作用下,绕转筒做左右摆
动,整个摆动过程如图6所示。
箭头表示立柱上部受到悬臂摆动过程中,反作用力的大小。
(c)大摆锤运动状态3(d)大摆锤运动状态4
(e)大摆锤运动状态5(f)大摆锤运动状态6
图6工况2大摆锤动力学分析中摆动状态图
悬臂在摆动过程中,立柱受到悬臂的反作用力,三个方向的反作用力及
总的反作用力如图7(a)所示,悬臂受到总的反作用力最大为574.43KN,总的反作用力最大值与丫向反作用力的最大值重合,表明大摆锤运动到底部时,
受到的反作用力主要由丫向反作用力提供,大摆锤运动到底部时,受到的载荷最大。
Z向的反作用力最大为0.14KN,如图7(b)所示,由于为偏载,Z向反作用随着转盘的周期转动,呈现周期性变化。
具体数据见附表2。
(a)立柱反作用力的载荷时间曲线
(b)立柱受到Z向反作用力的载荷时间曲线图7工况2立柱受到悬臂的反作用力曲线图
343大摆锤启动制动的动力学响应
悬臂在启动制动过程中,立柱受到悬臂的反作用力,三个方向的反作用
力及总的反作用力如图8所示,悬臂受到总的反作用力最大为200.25KN,其
中丫向反作用力最大为193.75KN,X向反作用力最大为50.627KN,Z向反作用力几乎为零,可以忽略不计,具体数据见附表3
山5
2,0025e+5一_-_一•
1.6er+5
1.26-1-5-
SOOOD
40000
-2.5426e-7———
0.hl0.20.3CL40+5
1
图8启动制动立柱受到悬臂的反作用力曲线图
3.5小结
本节中,分别对大摆锤在满载工况和偏载工况下,进行了刚体动力学的分析,并得到,在悬臂摆动过程中,两种工况下,悬臂对立柱转筒的反作用力。
分析结果表明:
(1)在整个摆动周期内,当悬臂运行到最底部时,立柱受到的载荷最大;
(2)在偏载工况下,由于偏载,对立柱的影响很小,偏载载荷为总反作用力的:
0.14KN=0.2%;
574.43KN
(3)启动制动过程中,悬臂等附属结构对立柱产生反作用力,为进一步有限元分析的前提输入条件。
4不同悬臂摆角下立柱的有限元分析
由上一节分析可知,由于转盘的偏载,对立柱的影响很小(大约0.2%),所以只计算满载工况下,悬臂在不同摆角时,立柱的结构应力。
4.1大摆锤的材料参数
5
弹性模量E=2X10MPa,泊松比=0.3。
4.2大摆锤载荷特性分析
大摆锤在重力作用下在铅垂平面内作周期运动,就可以简化成为单摆的物理运动模型。
如图9所示。
图9大摆锤运动的物理模型
假设大摆锤的最大摆角a=120°,则高度
hrsin(a90)rsin30-
2
(1)
其中:
h――大摆锤最高点距转筒中心轴线的高度;
r大摆锤悬臂的长度。
在转盘摆动的整个周期中,转盘绕转筒轴做圆周运动,则向心力:
2
VF向mr
其中:
m大摆锤摆动部分的简化质量;
v大摆锤运动过程中的瞬时速度。
在大摆锤的从最高点,摆动的整个周期过程中,仅受到重力的作用,机械
能守恒:
2mv
2⑶
其中:
一一大摆锤摆动角度;
g标准重力加速度,9.8m/s;
在转盘整个摆动过程中,摆动部分仅受到重力和向心力作用,在悬臂中心线方向上,摆动部分受三个力作用:
向心力、重力在中心线上的分量、悬臂对摆动部分的拉力,三力保持平衡:
F向F拉mgcos
(4)
其中:
F拉——悬臂对摆动部分的拉力;
悬臂的拉力,分别在水平和竖直方向进行分解:
FxF拉sin
FyF拉cos
(5)
把以上公式进行联立,求得大摆锤摆动部分的质量对悬臂的拉力为:
1
Fxmg(2cos?
)sin
(b)支架固定筒
(a)立柱支架的二分之一
(d)立柱
(a)立柱支架的二分之一
网格
(b)支架固定筒网格
(c)立柱与支架固定筒的
连接局部网格
(d)立柱网格
图11支架固定筒和立柱的有限元模型
根据大摆锤的几何模型,建立了有限元模型。
采用20节点的186单元对
有限元实体模型并进行单元网格划分,并使用自由的四面体网格划分方法,
获得的较为理想的有限元网格,为获得较为精确的仿真结果,并在关键部位
进行局部加密。
如图11所示。
单元总数为221815个,节点总数为408502个
4.5载荷与约束
根据立柱与固定筒结构的对称性,在结构的对称面上施加对称约束。
立柱底座的上施加全约束,模拟底座与地面的固定连接。
由整体分析报告可知,单只为其四分之一时,考虑冲击系数时的最大拉力为**kg,此值为运行到最低部时,考虑四倍加速度情况下的质量,在不同摆角的工况下,则仅考虑1.5倍的冲击系数时,二分之一最大拉力为:
机架纯总静载荷**kg,考虑为二分之一结构,机架纯总静载荷**kg。
考虑重力的影响,在丫的负方向,施加标准的重力加速度9806.6mm/s
载荷与约束如图12所示
图12立柱与固定筒载荷与约束示意图
4.6有限元应力分析结果
根据悬臂摆角的大小,分别对=120°、90°、45°等工况进行分析。
4.6.1=120°支架有限元分析
悬臂的摆角=120°时,把m=**kg代入公式(6):
1
Fxmg(2cos-)sin=***N
(a)立柱整体的应力云(b)立柱的局部最大应
图力
图13e=120°立柱与固定筒的分析结果
462=90°支架有限元分析与上一节类似,省略。
OOOOOO
4.6.3=45°支架有限元分析
与上一节类似,省略。
000000
4.7小结
表1所示为大摆锤立柱各工况下的应力值及相应的安全系数。
表1结果汇总表
工
况
摆角
评价变量
许用值
结论
名称
应力值
安全
系数
1
120
O
立柱最大应力
31.6M
Pa
11.9
3.5
满足条件
2
90
o
立柱最大应力
37.4M
Pa
10.0
3.5
满足条件
45
立柱最大
70.7M
5.3
3.5
满足
3
o
应力
Pa
条件
注:
(1)大摆锤结构所米用材料为Q235根据《游乐设施实用手册》中GB8408-2008《游乐设施安全规范》表2规定,游乐设施承受到最大应力与材料的极限应力的比值为安全系数:
n=」_>[n],其中b=375Mpa[n]为3.5。
max
5大摆锤启动制动有限元分析
材料属性、有限元模型、单元网格划分与上一节相同,不再累述,参照上一节内容。
5.1载荷与约束
根据立柱与固定筒结构的对称性,在结构的对称面上施加对称约束。
立柱底座的上施加全约束,模拟底座与地面的固定连接。
由第三节动力学分析结果可知,丫向反作用力最大为**KN,X向反作用力最大为**KN,考虑1.5倍的冲击载荷,施加在立柱固定筒的相应位置。
考虑重力的影响,在丫的负方向,施加标准的重力加速度9806.6mm/s2<载荷与约束如图16所示。
整体的载荷与约束(b)固定筒的载荷与约束
16启动制动工况下立柱载荷与约束示意图
5.2有限元应力分析结果
在悬臂启动制动的工况时,悬臂及转盘等冲击载荷,以及机架等附属静载荷作用下,支架固定筒和立柱的整体应力(第三强度理论计算值)云图如图17(a)所示。
最大应力为50.093MPa,出现在立柱与底板的连接部位,如图17(b)所示。
图17启动制动工况下立柱的分析结果
5.3小结
在大摆锤启动制动的工况下,立柱的最大应力为50.093MPa,对应的安
全系数为7.5,大于规定的3.5的安全系数,表明,启制动工况下,大摆锤立柱满足设计要求。
6大摆锤模态分析
6.1几何模型及单元划分
使用通用结构分析软件ANSYSWorkbenchEnvironment(AWE)14.0多物
理场协同CAE仿真软件,建立了有限元实体模型,如图18所示。
根据大摆锤的几何模型,建立了有限元模型。
采用20节点的186单元对
19所示。
单元总数为166567个,
有限元实体模型并进行单元网格划分,并使用自由网格划分方法,获得了四面体为主的较为理想的有限元网格。
如图
图18大摆锤的几何模型
(a)大摆锤整体几何模型(b)立柱与悬臂连接局部
网格
图19大摆锤的有限元模型
6.2材料参数、载荷及约束
=7.85t/m
整体结构材料:
Q235钢。
材料力学参量为:
材料密度为
大摆锤立柱的底部施加全约束,载荷与约束如图20所示
图20载荷与约束示意图
6.3打摆锤的模态分析结果
使用通用结构分析软件ANSYSWorkbenchEnvironment(AWE)14.0中的
模态分析模块Modal,对大摆锤进行模态分析。
计算得到的前6阶固有频率结果。
如图21所示。
阶变形图阶变形图阶变形图
图22大摆锤的前6阶变形图
6.4小结
由以上分析可知,大摆锤的自振频率为0.80099Hz。
由厂家提供数据可知,大摆锤每分钟摆动13.66次,则对应的摆动频率为0.23Hz。
计算结果表明:
大摆锤的摆动频率,小于大摆锤的自振频率,不会引起共振效应。
7大摆锤立柱的屈曲分析
7.1立柱屈曲分析概述
当载荷达到某一临界值时,结构构形将突然跳到另一个随遇的平衡状态,称之为屈曲。
在进行屈曲分析时,至少要施加一个能够引起结构屈曲的载荷,而且,所有的结构载荷都要乘上载荷系数,即可得到屈曲的临界载荷。
屈曲分析一般是耦合分析,先进行静力结构分析,然后耦合屈曲分析。
结构模型和有限元网格模型,采用结构分析报告中的模型。
由结构分析可知,单只为其四分之一时,考虑冲击系数时的最大拉力为**kg。
四分之一支架固定筒受到吊臂等的载荷为F仁
Fi=***X9.8=**N
静力结构分析采用结构分析计算结果,在静力结构分析的基础上,耦合
屈曲分析
7.2打摆锤立柱的屈曲分析结果
使用通用结构分析软件ANSYSWorkbenchEnvironment(AWE)14.0中的
屈曲分析模块LinearBuckling,对大摆锤进行屈曲分析。
计算得到的屈曲模态振型,可知立柱的屈曲载荷因子为38.074如图23
所示。
图23大摆锤立柱屈曲模态振型
7.3小结
由以上分析可知,屈曲载荷因子为38.073,大摆锤单只立柱的临界力:
**X38.073=***N
8结论
本部分报告对大摆锤整体结构强进行动力学评价与分析,分别计算大摆
锤转盘在满载和偏载工况下,大摆锤悬臂摆动,对整个结构的影响;以及悬臂的摆角在120°、90°和45°时立柱的结构应力;大摆锤立柱的屈曲分析;悬臂驱动制动分析;整体结构的模态分析。
计算结果表明:
(1)大摆锤满载和偏载工况下的动力学分析,当悬臂运行到最底部
时,立柱受到的载荷最大;偏载,对立柱的影响很小,偏载载荷为总反作用力的0.2%;
(2)悬臂的摆角为120°、90°和45°时,立柱达到规定的安全系数,满足结构设计的要求;
(3)悬臂启制动工况下,安全系数为7.5,大摆锤立柱满足设计要求;
(4)大摆锤的摆动频率,小于大摆锤的自振频率,不会引起共振效应;
(5)立柱的屈曲载荷因子为38.073,远大于1,满足稳定性的要求。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 大摆锤 动力学 分析 报告
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《大侦探小卡莱》读后感.docx
《大侦探小卡莱》读后感.docx
-
《关于小学保护环境演讲稿范文锦集10篇》.docx
-
《骆驼祥子》问题.docx
-
《探究平抛运动的规律》教学设计.docx
-
《傅雷家书》名著阅读训练题含答案练习.docx
-
《机械原理》试题解析.docx
-
《浅谈法律适用的概念三篇》.docx
-
《物联网概论》电子教学说课.docx
-
《中国诗词大会》第一季题库.docx
-
3云南省食品安全地方标准《鲜花饼》.docx
-
《肺结核病防治知识》.docx
-
《会展客户关系管理》复习资料.docx
-
《拍皮球》教案.docx
-
《我的家乡》教学设计.docx
-
《中国教育史》复习要点.docx
-
《比尾巴》教学实录及点评.docx
-
《各运动品牌口号》.docx
-
《教学管理模式的创新研究与实践》课题开题报告.docx
-
《实验室日常管理规定》.docx
-
《学习《铁窗忏悔录》心得》.docx
-
《最大的书》教案2.docx
-
09系统部署方案设计.docx
-
41食物与营养 浙教版九年级科学上册学案.docx
-
360全息投影系统方案.docx
-
Android实训心得.docx
-
《背起爸爸上学》观后感5篇精品模板.docx
-
CAD三维建模教案0038课时doc.docx
-
c语言习题.docx
-
《个人能力提升计划》.docx
-
《产品质量法》培训.docx
-
《工程招投标与合同管理》期末考试复习题及参考答案.docx
-
《数字歌》教学设计.docx
-
营养学基础教案1Word文件下载.docx
-
应用写作试题库1Word格式.docx
-
优秀精编现代休闲旅游农业园区总体布局规划方案文档格式.docx
-
游泳竞赛规则Word文件下载.docx
-
有限合伙企业章程标准版Word文档下载推荐.docx
-
幼儿园20XX年秋季保教工作小结Word格式文档下载.docx
-
幼儿园大班健康教案《眼睛》Word文档下载推荐.docx
 苏教版语文三年级1-4单元复习要点PPT文件格式下载.ppt
苏教版语文三年级1-4单元复习要点PPT文件格式下载.ppt
-
幼儿园教师实习心得体会Word文件下载.docx
-
幼儿园六一儿童节活动计划Word文档下载推荐.docx
-
幼儿园申报市依法治园先进单位工作总结Word格式文档下载.docx
-
幼儿园文明和谐校园创建工作总结Word文档格式.docx
-
语义学理解Word格式文档下载.docx
-
域名服务DNS是由柏克莱网间名域BerkeleyWord文档格式.docx
-
员考试综合知识复习资料及答案Word文档格式.docx
-
月初问候祝福语Word文件下载.docx
-
云南省景洪市第三中学届九年级上学期期末考试英语试题附答案653981Word文档格式.docx
-
在linux环境下搭建web项目Word文档格式.docx
-
赞扬老师的话集锦Word格式文档下载.docx
