 控制系统数字仿真与CAD第三章习题11.docx
控制系统数字仿真与CAD第三章习题11.docx
- 文档编号:10477386
- 上传时间:2023-05-26
- 格式:DOCX
- 页数:14
- 大小:128.09KB
控制系统数字仿真与CAD第三章习题11.docx
《控制系统数字仿真与CAD第三章习题11.docx》由会员分享,可在线阅读,更多相关《控制系统数字仿真与CAD第三章习题11.docx(14页珍藏版)》请在冰点文库上搜索。
控制系统数字仿真与CAD第三章习题11
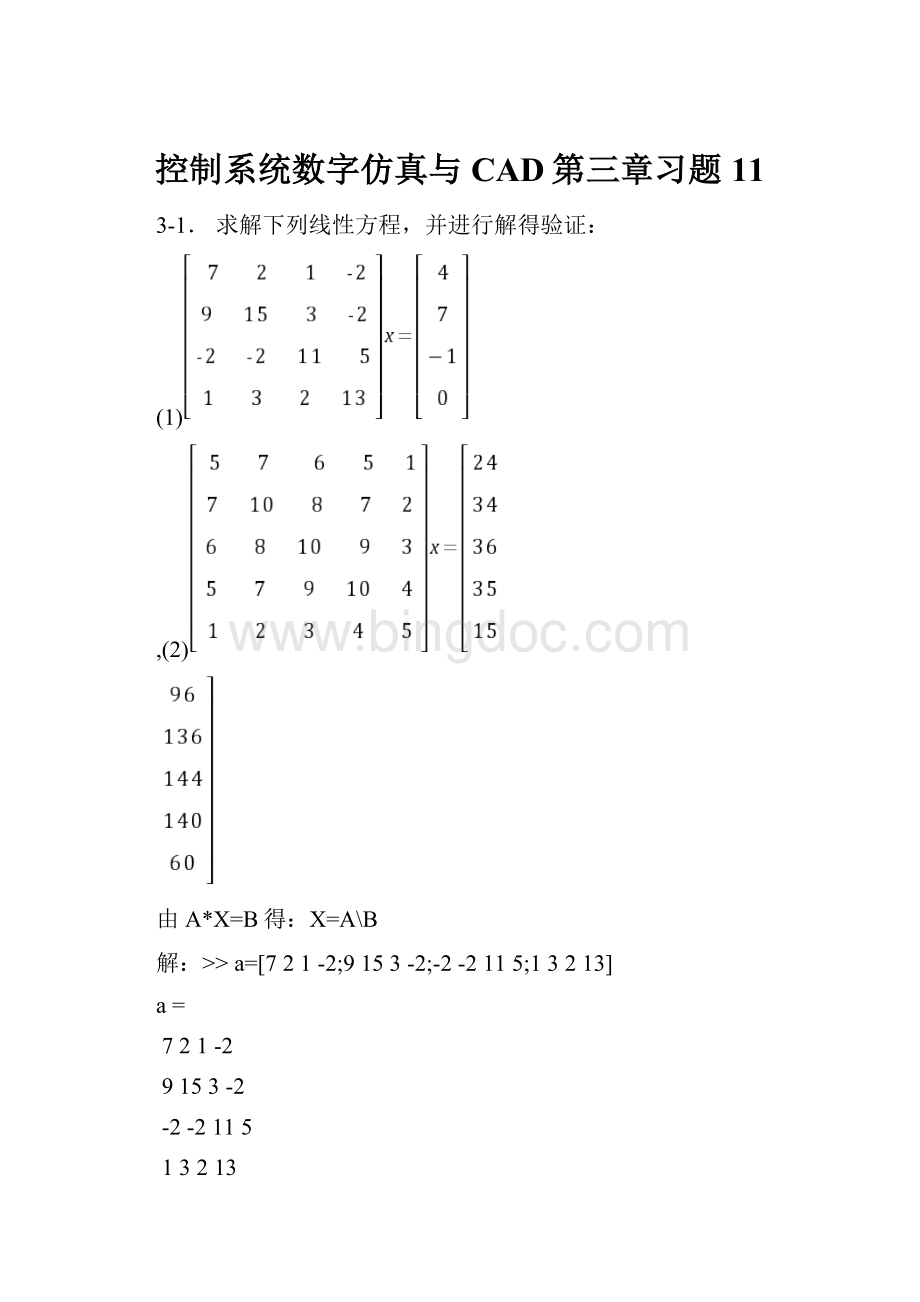
3-1.求解下列线性方程,并进行解得验证:
(1)
(2)
由A*X=B得:
X=A\B
解:
>>a=[721-2;9153-2;-2-2115;13213]
a=
721-2
9153-2
-2-2115
13213
>>b=[47-10]'
b=
4
7
-1
0
>>x=a\b
x=
(2)解:
>>a=[57651
710872
681093
579104
12345]
a=
57651
710872
681093
579104
12345
>>b=[2496
34136
36144
35140
1560]
b=
2496
34136
36144
35140
1560
>>x=a\b
x=
3-2.进行下列计算,给出不使用for和while等循环语句的计算方法。
(1)
解:
根据等比数列求和方法,在利用matlab中的m文件,编写程序求解。
M文件为n=64;
q=2;
k=(1-q^n)/(1-q);
disp('k的值为');
disp(k);
保存文件
在matlab命令框中输入>>q1
k的值为
+019
(2)求出y=x*sin(x)在0 解: 画出图形 >>x=0: : 100; >>y=x.*sin(x); >>plot(x,y); >>gridon >>title('y=x*sin(x)') >>xlabel('x') >>ylabel('y') 方法1。 从图形中不难看出峰值点取决于函数sin(x),即在sin(x)为峰值时,y就得到峰值。 所以求取函数的峰值转化为求取正弦函数波峰问题。 而sin(x)在x= +2k (k为整数),所以求取y在上述x时刻的数值就是峰值。 在matlab命令行里键入 >>x=pi/2: pi*2: 100; >>y=x.*sin(x)%注意是。 *不是*% 得到结果y= 方法2.a=size(y)a=11001 b=([y(2: 1000)]>[y(1: 999)])&([y(2: 1000)]>[y(3: 1001)]); at=find(b==1); disp(y(at)) 就可以找到最大值点 3-3.绘制下面的图形。 (1)sin(1/t),-1 (2) -1 (1)解: >>t=-1: : 1; >>y=sin(1./t);%注意是./不是/% Warning: Dividebyzero. >>plot(t,y) >>gridon >>xlabel('t') >>ylabel('y') >>title('y=sin(1/t)') (2)解: >>t=-1: : 1; >>y=1-(cos(7.*t)).^3;%注意是.*与.^% >>plot(t,y) >>gridon >>xlabel('t') >>ylabel('y') >>title('y=1-cos(7t)^3') 3-4.已知元件的实验数据如下,拟合这一数据,并尝试给出其特性方程。 X Y X y 解: 采用最小二乘曲线拟合 >>x=: 1: ; >>y=[]; >>p=polyfit(x,y,3);%选定曲线的阶数为3阶,阶数<5,否则曲线不光滑,有数据振荡% >>xi=0: : ; >>yi=polyval(p,xi); >>plot(x,y,xi,yi) >>gridon 红色: 采样曲线绿色: 拟合曲线 3-5.分别使用解微分方程方法、控制工具箱、simulink求解具有如下闭环传递函数的系统的阶跃响应。 解: (1)用解微分方程方法: 将 转化为状态方程,利用matlab语句 >>num=[10]; >>den=[18364010]; >>[ABCD]=tf2ss(num,den) 得到结果: A=-8-36-40-10 1000 0100 0010 B=1 0 0 0 C=00010 D=0 得到状态方程 编写m文件求解微分方程组 functiondx=wffc(t,x) u=1;%阶跃响应,输入为1% dx=[-8*x (1)-36*x (2)-40*x(3)-10*x(4)+u;x (1);x (2);x(3)]; 保存文件%注意: 保存文件的名字与函数名一致! % 在命令行键入>>[t,x]=ode45('wffc',[0,8],[0;0;0;0]); >>y=10*x(: 4); >>plot(t,y); >>grid 得到结果为下图所示: (2)控制工具箱: 在matlab命令行中键入>>num=[10]; >>den=[18364010]; >>sys=tf(num,den); >>step(sys); >>grid 得到阶跃响应结果如图所示: (3)simulink求解: 在simulink模型窗口中建立如下模型,键入该题的传递函数。 start后,观察scope中的仿真波形如下: 3-6.已知系统的闭环传递函数 ,试分析该系统的稳定性。 解: 由稳定性判据: 当闭环传递函数所有极点都位于虚轴左半平面时,该系统稳定。 传递函数的特征方程为: =0,解此方程,得到特征根,即闭环极点。 在matlab命令行里键入>>p=[13422]; >>r=roots(p)%求多项式等于零的根% 得到r= + - + - 闭环极点的实部都小于零,即都位于虚轴左半平面,所以系统稳定。 3-7.选择不同的a值,对下式描述的系统进行仿真实验。 分析不同参数与数值方法对系统性能的影响。 ; 解: 3-8.某小功率随动系统动态结构如图所示,已知: 若系统输入分别为 ,适用simulink分析系统的输出 分别如何 解: (1)输入为1(t): 输出为: (2)输入为t时: 输出为: (3)输入为[1(t)-1]:


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制系统 数字 仿真 CAD 第三 习题 11
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《工程造价案例》期末考试复习题及参考答案.docx
《工程造价案例》期末考试复习题及参考答案.docx
-
《宽带IP网络》试题及答案北邮考试专用解析.docx
-
《描绘小灯泡的伏安特性曲线》试题精选.docx
-
1承诺办理时限是什么概念实际办理的时间能不能比承诺办理时限.docx
-
3年高考真题状语从句汇总含考查重点及答案.docx
-
4篇安装项目经理年终总结范文模板.docx
-
《C语言程序设计》学习指导.docx
-
《傲慢与偏见》人物性格分析.docx
-
《计算机应用实务》理论复习题.docx
-
《教育理论综合知识》试题及答案解析2.docx
-
《老人与海》上课学习上课学习教案.docx
-
《传感器技术》题库.docx
-
《C语言程序设计》习题及解答14章.docx
-
#2机组大修建议汇总.docx
-
《算法设计与分析》考试题目及答案教学内容.docx
-
《地心历险记》观后感600字600字读后感.docx
-
#对完善我国监护法律制度立法的思考.docx
-
《安全用电珍爱生命》宿舍安全用电宣传活动策划书.docx
-
《幼儿园数学教育活动指导》实践性教学方案1doc.docx
-
《1万吨年高效环保型复合活性生物菌剂15万吨年生物菌肥15万吨年生物菌饲料农业产业化技术改造项.docx
-
《工程质量检验标准》.docx
-
《财务预算学》复习思考题.docx
-
《中国诗词大会》第四季里的各类知识点汇总.docx
-
《财务会计》相关复习题英文版.docx
-
《拉丁美洲》音乐教案.docx
-
《春》学案1 1.docx
-
01人力资源战略规划与年度计划制订编写模板.docx
-
《Unit 4 Wheres my schoolbag》单元教案.docx
-
《航海雷达与ARPA》试题集72659.docx
-
《哪吒之魔童降世》电影观后感5篇观《哪吒之魔童降世》有感.docx
-
《第5单元 化学方程式》九年级化学单元练习.docx
-
1吨每小时纯净水设计方案.docx
-
图文DOS命令行在windows操作中的典型应用精简版.docx
-
推荐有关初中校园生活作文500字十篇.docx
-
外研社新标准一年级起点112册单词.docx
-
网架吊装施工方案.docx
-
商标使用界定标准的重构.docx
-
消防宣传广播稿.docx
-
上半年上海安全工程师安全生产法解析除氧试题.docx
-
小区物业防汛应急预案范文六篇.docx
-
少先队辅导员培训心得5篇.docx
-
小学骨干教师个人总结工作总结.docx
-
深圳市初级会计电算化考试练习试题之判断题.docx
-
小学生笑话.docx
-
小学一年级到六年级数学知识点整理总结.docx
-
生态环境状况评价技术规范 Word版.docx
-
校园紧急报警系统方案.docx
-
施工方案废水应急池施工方案.docx
-
新版PEP六年级英语上册各单元测试题含答案.docx
-
十二经用药歌诀中药常用.docx
-
新教材部编版七年级语文上册第三次月考试题.docx
